超声波传感器技术改进要点
2018-02-25李海龙
李海龙
摘要 本文结合超声波测距原理,对避障机器人超声传感器技术的的技术发展要点展开深入分析,对其技术发展路线和重要专利节点技术进行了中微观解读。从专利的视角分析了超声传感器的技术发展历程,并对超声传感器未来发展趋势进行预测。
【关键词】机器人 避障 超声 传感器 专利分析
1 引言
目前用于移动机器人的避障传感器技术主要有视觉、红外、激光、超声波传感器等技术分支,而与视觉及激光传感器比较,超声波价格低,设备坚固,当机器人行走时,往往仅须区分障碍物的基本形状以及它们彼此的远近,而不用获得色彩、性态等数据;与红外线传感器比较,超声波不但能够扫描到环境中物体的有无,并且可以获得物体离机器人的远近,比较有利于自主移动机器人取得判断结果。本文将对超声波传感器的国内外研究进行综述,并对其发展趋势进行展望。
2 超声波传感器避障检测方法
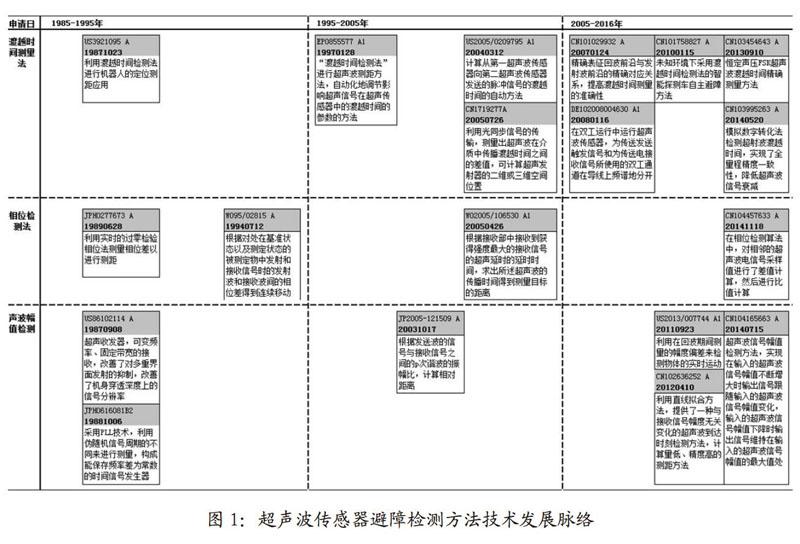
超声波传感器避障检测的方法有多,如渡越时间检测法、相位检测法、声波幅值检测法等,其中,渡越时间检测法是通过回波的返回时延判断距离;相位检测法是通过测量返回波与发射波之间相差多少相位,判断距离;声波幅值检测法是根据回波的幅度大小,判断距离。
结合以上各种方法的优缺点及具体应用,对移动机器人超声波避障传感器国内外专利进行筛选,并绘制出针对各种检测方法的重要专利申请时间节点,借此形成该领域技术发展的脉络,如图l所不。
3 超声波传感器技术改进要点
3.1 温度干扰
当超声波传感器工作时,由于测量超声波在空气中的时间来测量距离,声速必须是一定值,而实际上声速是受空气的温度、湿度、压力等的变化影响的,通常情况下,大气压力和湿度变化可以忽略不计,主要影响超声波传播速度的就是温度,一般温度每变化1℃,声速变化0.607m/s。把温度值的变化补偿到超声波的波速中,可降低温度对测距结果的影响。
1979年,三菱电机株式会社提出一种超声波式距离测定装置的温度补偿方法,在不使用热敏电阻等的情况下高精度地校正温度,进行精准的超声波测距(JPS5612781A);1984年,Blackwelders公司提出了一种存在温度补偿电路的超声波测距装置,可在宽温度范围内进行精准输出(US4567766A);1989年,韩国人KimSong-Kun提出了一种带有温度补偿电路的超声波测距装置(KR920006502BI):1997年,日本和泉电气株式会社,提出了一种超声波测距装置,能够精确补偿大气温度而不受参考电压的影响,产生频率随温度变化而变化的时钟信号(JPH1144759A):2002年,有国内申请人提出一种采用直接误差补偿方法的高精度超声测距仪,采用误差补偿标杆,其在测量中产生的误差补偿系数,消除了因声波传输介质的温度变化所带来的测量上的误差(CN2598000Y);2004年,日本陶瓷株式会社提出在不降低反射灵敏度的情况下,抑制因温度变化带来的静电容量的变化,并抑制混响的变化,在不使用温度补偿电容器的状态下,实现了在较宽的温度范围内近距离稳定检测障碍物的超声传感器(JP2006-135573A)。
3.2 超声串扰
超声串扰,是指在多个超声测距传感器同时工作时,其中的一个超声传感器接收到的信号是其他传感器发射的超声或超声碰到物体以后的回波,并非是自己发射超声的回波,由此会导致测量的障碍物距离结果发生错误。因此,如何有效地消除超声串扰,是当前研究热点。
1991年,Michigan大 学 的JohannBorenstein和Yoram Koren教授首次提出了“错误消除快速超声激励( Error-EliminatingRapid Ultrasonic Firing)”,针对两种不同的串扰源,此法采用“连续读数比较”和“交替延迟比较”分别消除外部和内部串扰源(US005239515A):2002年,Fortuna、Rizzo和Frasca等提出利用混沌通信领域中的“CPPM混沌脉冲位置调制(Chaotic PulsePosition Modulation)”的方法来消除串扰,CPPM可把超声传感器發射的脉冲之间的间隔和混沌信号的特性结合起来组成属于每个超声传感器的特殊信号(US2003/0133362A1);2006年,天津大学的孟庆浩教授提出“混沌脉冲序列宽度调制序列”针对每个超声测距装置的超声传感器分配唯一的发射序列,可有效去除超声串扰(CN1888932A):2008年,孟庆浩教授又进一步提出“使用遗传优化算法优化伪随机脉冲位置调制序列中相邻脉冲之间的时间间隔”消除机器人超声测距系统串扰问题(CN101271154A):2014年,重庆邮电大学的禄盛副教授等人通过“引入卷积编码和相关函数结合”,对超声波发射信号进行卷积编码,对超声波回波信号进行减噪处理,达到多通道超声波障碍物防串扰(CN105277933A)。
4 结论
超声波传感器因安装简单、价格低廉、不易受光线灰尘和电磁波的影响,广泛应用于移动机器人避障领域,但由于超声波传感器不能获取障碍物的边界信息、对障碍物不能准确定位,存在测量盲区,这也将是超声波传感器的下一个重要研究方向。在移动机器人避障传感器研究方面,将多个不同类型的传感器结合使用,充分发挥各检测方法的优势,实现机器人搜索路径的高效性、实用性、优化性,这种模式是未来机器人避障传感器的发展趋势。
参考文献
[1]卜英勇等,一种高精度超声波测距仪测量精度的研究[J].郑州大学学报,2006,27 (01).
[2]潘仲明等.大作用距离超声波传感器技术研究[J],传感技术学报,2006,19 (01).
[3]贺化,专利导航产业和区域经济发展实务[M].北京:知识产权出版社,2004.
