当前工业机器人应用中的机械结构设计方法分析
2018-02-20赵源
赵 源
(徐州华润电力有限公司,徐州 221000)
1 工业机器人机械结构设计原则
在工业机器人机械结构设计过程中,要结合实际问题建立健全的、统筹性较好的处理机制,按照标准化流程完善信息处理效果,确保设计能够满足预期。
1.1 最小惯量原则
相关人员在对零部件活动结构予以分析过程中,惯性冲击问题较为严重,设计过程要结合最小惯量原则,确保工业机器人平稳程度满足预期,且能有效减少运动末端误差问题。需要注意的是,在设计过程中要减少运动部件实际重量,确保运动连杆重心能最大程度接近转轴结构。
1.2 设计尺寸最优化原则
在工业机器人机械结构设计过程中,设计人员要结合设计要求对零部件进行综合分析,无论是尺寸还是结构,都要满足实际应用需求,建立零部件管控机制和运维管理体系,在尺度选择方面要保证更小,且能提升精密性。另外要选择强度较好的材料,集中维护最小惯量和最优尺度管理效率,辅助机器人克服峰值力矩造成的影响。
1.3 可靠性原则
在工业机器人机械结构设计过程中,相关人员要建立健全完整的可靠性测试体系,对相关问题进行集中预估,结合实际运行质量和运行需求建构系统化修正方案,保证机器人使用管理工作基本效率。在机器人应用过程中,要保证软件处理工序合理性,并在机器人经过调试后完成管理[1]。
除此之外,也要秉持工艺性原则、高刚度设计原则等,确保工业机器人机械结构设计工作能满足质量标准要求,提高工业机器人实际应用效率。
2 工业机器人机械结构设计方法
2.1 明确工业机器人机械结构设计任务
为了保证工业机器人机械结构设计工作质量,在设计工作前应明确相应工作任务,建立相应的控制流程,针对设计目的和设计方案予以针对性管理,确保不同功能的机器人都能按照差异化要点和标准完成基础设计工作。
2.2 整合工业机器人机械手臂运动学计算
对于工业机器人机械结构设计工作而言,机械手臂运动学管理和参数判定十分关键。
首先要对机械臂姿态进行计算,在三自由机械臂中,第1个关节绕Z轴进行旋转,其实际运动过程对于平面内轨道运行并不会产生影响,因此,将其化简为2自由度机械臂运行轨迹,如图1所示。
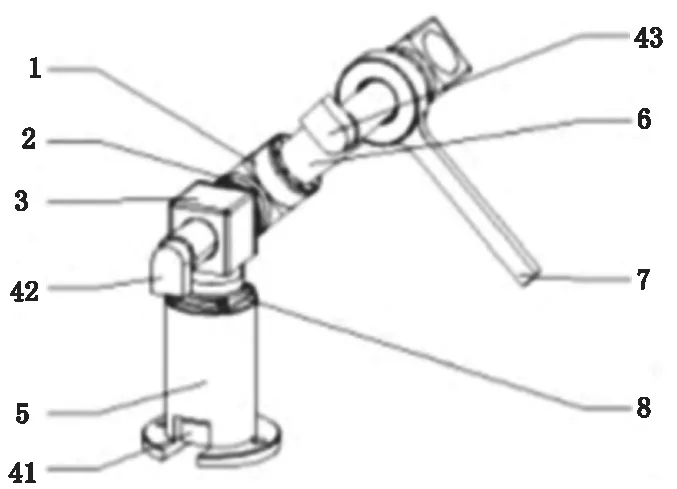
图1 机械臂整体结构示意图
结合图1,若是将D-H作为坐标,则机械运动仿真就要设定L2和L3等单位长度,并且保证末端执行器的位置和姿态都能得到约束,依据矩阵分析如下要素:
(1)对应矩阵元素为(1,1)相等关系时,得出相应等式如式(1)所示。

(2)对应矩阵元素为(1,4)相等关系时,得出相应等式如式(2)所示。

(3)对应矩阵元素为(2,4)相等关系时,得出相应等式如式(3)所示。

依据相关数据可知,式(2)是未知数状态,若依据传统解法不能有效解决相关问题,就要借助Matlab联合Solve函数进行求解。最终能计算出实数解能维护数据的连续性,剔除结果中的零解就能对x2和x3进行结果的存储。
其次,对机械臂关节参数进行数据处理,应用方程进行拟合处理和操作,确保能维护数据,将其应用在统一周期内,结合关联数据利用Adams软件进行关节驱动变化展开综合分析[2]。
2.3 优化设计流程
在工业机器人结构设计工作中,要确定臂长后对其进行优化处理,在最小工作空间范围内提升操作效果,维护机械结构设计实效性。另外,要对主体结构进行综合设计,完善负载惯量估算过程,对驱动力矩予以详细判定,并进行集中优化驱动部件选型工作,完善传动装置设计效果,按照电气布线和电气接口设计要点提升实际效率。
最后要进行设计产品精度和出图管理,秉持精细化管理机制,对产品精度进行全面分析,有效整合不同零部件尺寸结构,按照标准化设计要求对机器人样品进行加工生产管理,保证生产改进机制能发挥实际价值[3]。
3 结语
在工业机器人结构设计过程中,要按照标准化设计原则有序开展相应工作,完善处理机制,提升管理工作科学性和综合水平,全面处理样品生产中存在的问题,提高设计工作应用价值,有效促进工业机器人机械结构设计工作。
