KELLER-DCX-22压力式验潮仪观测数据处理方法
2018-02-18黄东阳
黄东阳
摘 要:随着压力式验潮仪的普及,其采集的数据的精度越来越受到关注,文章采用KELLERDCX-22压力式验潮仪观测的数据同时结合海水密度、滤波光滑处理、修正至当地理论最低潮面以及对潮位数据可靠性进行计算和分析,以便达到预想的精度。为此次潮州港水深测量水位提供可靠性的依据。
关键词:水密度计算 滤波 理论最低潮面 数据可靠分析
1.引言
在海道测量和海洋测绘当中,潮汐观测是测量过程中的主要内容之一。在以往的测量作业当中,通常采用人工验潮方式。投入了大量的时间和劳动力,而验潮仪的普及,给海洋测绘行业带来了很大的便利。
由于天气和仪器本身等诸多因素的影响,验潮仪所采集的数据通常不能直接用于水位改正,需要进行相应的处理。把潮位数据的误差控制在误差允许范围内,以达到潮汐分析和水位改正的要求。
2018年4月交通运输部南海航海保障中心广州海事测绘中心测量分队在潮州港水深测量任务当中,为获取足够的潮汐数据,达到预期的水深测量精度,分别在汕头深澳镇、潮州大塘电厂、柘林湾海事局码头、三百门码头的水下固定位置以及在海巡1762测量船上分别安放了KELLER-DCX-22压力式验潮仪,设置为每隔5min记录一次数据,其中海巡1762上的压力验潮仪作为气压值的测定。获得了大量的观测数据。对这些观测数据进行分析。
2.KELLER-DCX-22验潮仪数据计算原理
压力式自动验潮仪的主要原理是压力探头内半导体扩散硅片或者是陶瓷电容压力传感器在受到静压力时会产生压电效应,经过温度补偿和线性修正后传感器输出为电压或电流信号,最后通过A/D转化为潮位值。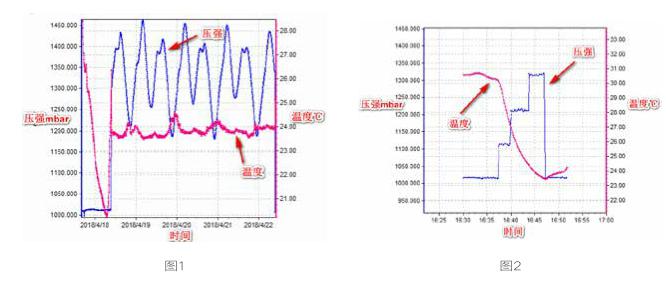
KELLER-DCX-22压力式潮位仪的原始数据如图1。
压力式潮位仪潮位关系式如下:
φ为验潮仪的地理纬度
通过以上的公式推导,可以算出潮位值。
3.验潮数据海水密度的计算与改正
为了方便得到较为精确的水密度值,在不用量取海水盐度的情况下,可采用如下方法:以柘林湾临时验潮站为例。将验潮仪,分别固定于水下1m、2m、3m的位置,量取多组数据,如图2。
通过公式(1)计算可得到相应深度层的水密度值,如表1。
通过表1得到的海水密度值反算出不同深度值的误差,如表2。
从上表结果可知,采用1010.88kg/m3密度值误差最小,引起最大误差值为-1.24cm;满足“观测误差不大于±2cm的”观测规范要求。验潮棒投放在3m深度层以下,故该采用1010.88kg/m3密度值计算潮位水深。
4.验潮数据的滤波光滑处理
受风浪等短周期引起的因素影响,如图3。
需要对验潮数据进行滤波平滑处理,以上滤波以柘林湾验潮仪为例。滤波既要消除因风浪引起的短周期干扰, 还不能对潮位数据有损坏。一般可以采用多次多项式的方法对潮位数据进行自动滤波。滤波程序采用滑动滤波的思想,可以根据潮汐类型自主选择滤波长度。滤波长度过长可能会对潮位曲线有不利的影响,需要顾及潮汐类型选取合理的滤波长度,从而确保滤波的最佳效果。
5.验潮数据的修正至当地理论最低潮面
通过等外水准测得人工水尺读数的改正数,然后通过人工水尺读数与自动验潮仪数据的比对,把自动验潮仪的数据修正到当地的理论最低潮面,如表3。
通上表可知自动验潮仪数据的改正数为-1.47m时,数据误差在不大于±2cm,符合规范要求。
为保证自动验潮仪数据的严谨和可靠性,人工检核需要在测前、测后同时至少15天进行一次,即人工水尺读数与自动验潮仪数据进行比对。检核时间应不少于2小时,采样间隔为10分钟一次。
6.验潮数据的可靠分析
通过附近相邻或相近的验潮站的观测数据的曲线,可以推导其潮汐性质。本次测量成果所安放的验潮仪均为岸上,通過人工水尺比对方式可以确定验潮仪的零点有无漂移,同时也可通过岸上各站潮位曲线的相关性进行判断并修正(如图4)。该方法适用于海上定点验潮站。
7.结束语
验潮仪的使用给海上测量带来了便利,在实际的应用中,应特别关注外面环境变化对测量结果精度的影响。其中海上气压影响最为显著,海水密度次之。本次潮州港水深测量潮位数据通过上述的处理,较好地提高了验潮数据的准确度,能够满足水深测量的水位改正要求。
参考文献:
[1]莫旭科.压力式验潮仪数据误差分析及校准[A].气象水文海洋仪器,2017.
[2]张铁军.压力式验潮仪观测数据的处理方法研究[B].海洋测绘,2007.
