LiDAR点云中快速提取建筑物的方法研究
2018-02-15易茹兰易明华徐玉玲
易茹兰 易明华 徐玉玲
(1.江西省地理国情监测遥感院 江西南昌 330209;2.江西省测绘应急保障服务中心 江西南昌 330209;3.流域生态与地理环境监测国家测绘地理信息局重点实验室,江西 南昌 330209)
1 引言
建筑物作为地理空间中与人类生产生活息息相关的地理实体,在城市规划、教育科研、军事勘察、应急预案等领域具有重要作用。传统的建筑物空间信息主要表现为DLG或DOM的形式,这两种表现形式均缺乏对建筑物三维重建的能力。为充分展示及应用建筑物的空间信息,关键在于获取其平面与高程的三维信息以实现对建筑物的三维重建,而机载LiDAR能快速准确地获取大面积的地面点云三维数据,从这些点云数据中准确提取出建筑物点云,则能实现地面建筑物的三维重建。
目前,国内外学者及研究人员对从LiDAR点云数据中提取建筑物信息进行了大量研究和实验,提出了多种算法。杜守基等人提出将LiDAR点云与正射影像联合构建能量函数数据项,综合DSM和归一化植被指数NDVI构建平滑项,采用图割和前后景分割算法获取建筑物边缘[1];马东岭等人提出基于高度差异将建筑物、植被从大量点云数据中进行分类的方法[2];刘开伟等人对目前从LiDAR点云数据中提取建筑物的方法适应性进行了分析研究[3]。
由于建筑物的面积、形状、坐落的地势,及周围树木遮盖情况的差异,目前该领域的研究仍存在局限性。鉴于此,本文在结合当前已有各项研究成果的基础上,探讨一种从LiDAR点云中快速高效提取建筑物三维信息的方法,并验证该方法的适应性。主要理论依据及技术路线如图1所示。

图1 本文方法技术路线
2 LiDAR点云中快速提取建筑物
2.1 数据预处理生成DSM、DTM、nDSM
由于激光雷达传感器误差,LiDAR点云获取过程中存在悬于空中的异常粗差点,如飞鸟等,首先利用基于统计分析的方法[4]对点云进行滤波处理,剔除异常粗差点,同时过滤掉悬于空中的电力管线点云。将剔除粗差点和空中电力管线点后的全部点云,内插生成数字表面模型DSM。
对滤波后的全部点云进行地面点分类,地面点分类采用的算法是通过反复建立地表Delaunay三角网模型的方式分离出地表上的点。主要规则为:在开始时选择一些低点,认为它们是位于地表处。通过“建筑物最大边长”参数来控制初始点的选择。若设置该参数为50米,则认为每50米的搜索区内至少存在一个地面点,即该点位于地面上。同时通过“角度迭代值”、“距离迭代值”的设置决定一个点有多近才能被纳入三角平面,即点之间有多近才能参与建Delaunay三角网。算法通过反复加入新的激光点开始向上扩建模型,每个加入的点使模型更加贴近地表进而分离出地面点,将分离出的地面点内插生成DTM。
将生成的DSM与DTM做相减操作,得到规则化DSM(即nDSM),其对应实体主要为建筑物、植被等。要从nDSM中提取建筑物,关键在于分离出植被类。
2.2 低矮植被分离方法
由于低矮植被间大多连片且高度差异不大,其顶面有类似建筑物的特征,因此本文提出需先将其从LiDAR中分离。从上文讲到的nDSM中分离低矮植被,是根据地表点按高度处理进行低矮植被分类,其规则是:用地表处的点建立一个临时的三角形模型,然后其它的点与这个三角形模型的高度值进行比较。通过设置低矮植被的高度范围值(一般设置为0至2米之间),根据点是否落在与地表模型相比较的这一高度范围区间中从而判断点是否为低矮植被。
2.3 建筑物提取方法
建筑物和植被存在一显著特征差异,即:建筑物除边缘地区高度变化剧烈外,表面均比较规则和连续,基本没有高度连续剧烈变化情况;而植被由于生长不规则,接收到的植被点云变化剧烈,没有平整性,尤其是高的植被。基于此,利用激光扫描线方向X变量值与高度函数值Z的导数值来确定LiDAR点云是否为建筑物类型,具体为:

公式(1)中,相邻扫描线上LiDAR点云的高度函数值Z对扫描线方向X变量值求一阶导数,其值为常数m,则可认为这些点在同一水平面上,构建出的相邻不规则三角网TIN有相同的方向,且这些点在一条直线上,符合建筑物平顶面特征;公式(2)中,LiDAR点云在其他方向的X变量值与高度函数值Z的二阶导数为常数n,则可认为这些点云形成了一规则连续的几何模型,符合建筑物屋脊线特征。
采用以上方式求LiDAR点云高度函数值Z对各方向X变量值的导数值,同时通过设置最小建筑物面积、建筑物最大的顶面角度(即认为超过该角度则认定为墙面)、LiDAR点云高度差容差值、同一建筑物顶部的两扫描点之间最大间隔(该值要比建筑物的最小间距小)确定点云是否为建筑物类,从而将其分离出。
3 实验与结果分析
实验数据选取实地具有建筑物、道路、植被、水系等地形地貌要素的LiDAR点云数据,首先利用TerraSolid软件,对实验地区的点云数据进行滤波,分离出地面点云、低矮植被点云。再利用上文中求LiDAR点云高度函数值Z对各方向X变量值的导数值方法,通过设置建筑物的相应参数实现对人造建筑物点云数据的提取,具体实现过程及参数设置见图2、图3、图4所示。

图2 地面点分离

图3 低矮植被分离

图4 建筑物分离
通过以上方法从所选LiDAR点云实验数据中分离出建筑物,实验部分结果如图5中左图所示,选取与LiDAR点云数据同时段获取的航空影像制作成的DOM成果,将其与分离出的建筑物成果对比,对比情况如图5所示。从实验成果与DOM对比可知,建筑物提取的效果好,准确度高。
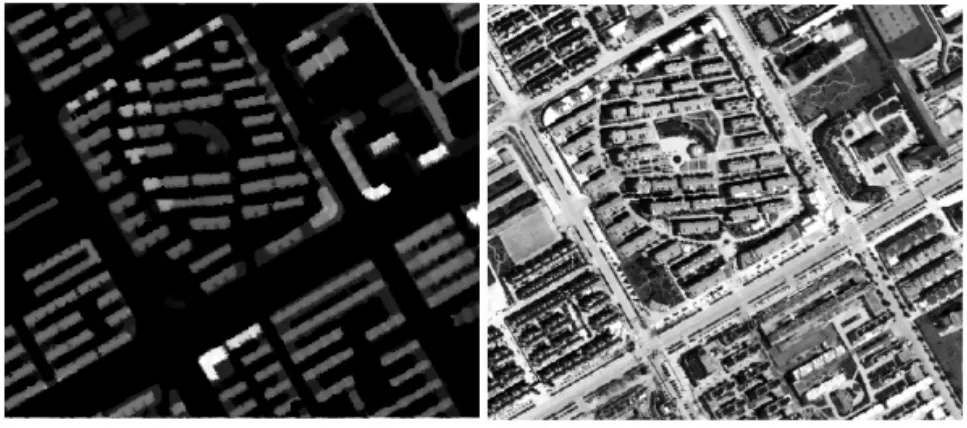
图5 实验成果及与对应影像对比图
4 结束语
本文通过对机载LiDAR点云数据中建筑物信息的特征分析,提出一种从LiDAR点云中快速提取具有空间三维信息的建筑物的方法。该方法首先对点云进行滤波去噪处理生成DSM,再从大量点云中提取出地面点生成DTM,基于激光扫描线方向X变量值与高度函数值Z的导数值是否为常数以确定点云为建筑物类型的理论,最终分离出建筑物。通过选取实验数据进行方法论证并进行成果分析,结果表明该方法对建筑物提取速度快,效果较好,对实际生产应用具有很大的应用价值。
