基于HJ与MODIS影像时空融合的水稻种植面积的提取
2018-02-15毕苗苗庄齐枫王
毕苗苗庄齐枫王 浩
(1.南京工业大学 测绘与科学技术学院 江苏南京 211816 2.中国测绘科学研究院/摄影测量与遥感研究所 北京市 100073)
1 引言
我国的粮食作物生产中,水稻占有非常重要的地位。其播种面积占全国粮食总播种面积的27%,产量达到全国总产量的35%[1]。因此对水稻面积的监测逐渐成为相关领域的热点问题。而遥感技术因其覆盖面积大、重访周期短以及获取成本相对低等特点,对大范围的农业生产调查和监测管理具有独特的作用[2]。
MODIS和中分辨率的HJ常被用于农作物生长监测,然而MODIS因分辨率较低,提取的精度较低;HJ等中分辨率影像尽管精度较高,但时间分辨率不足,在云雨影响较大的地区常因无法获得最佳时相的影像而影响提取精度。
与单源遥感数据相比,多源数据融合可以获得比单个输入的数据元素更多的信息[3]。遥感的时空融合技术应运而生,其核心是将高空间分辨率数据和高时间分辨率数据结合生成既有高空间分辨率和高时间分辨率特征的数据[4]。遥感时空融合技术的基本思想是利用线性混合模型,在已知的丰度矩阵和低空间分辨率像元反射率的基础上,使用最小二乘法来解算中分辨率像元的类别平均反射率[5-6]。邬明权等[7-8]提出了基于像元反射率的时间变化特征和前期中分辨率Landsat影像的纹理特征的时空融合技术。Gao[9]等在2006年提出了自适应遥感图像时空融合方法,即STARFM,不仅考虑了与目标像元的距离和光谱相似性,还考虑了时间上的差异。蒙继华等[10]基于STARFM算法,提出了能更好利用植被时间变化特征的STAVFM算法。
上述研究对不同的融合算法进行了改进,选择合适的融合算法是成功提取水稻种植面积的关键。本文以高邮为研究区域,选择发展比较成熟的STARFM和STAVFM两种算法,使用环境星30m空间分辨率数据以及500m空间分辨率的MODIS 09GA产品。对比两种算法融合结果,选择精度较高的算法结果,并使用决策树进行水稻面积提取。
2 数据与方法
2.1 研究区介绍
研究区高邮(如图1),经纬度范围:纬度32°38′-33°05′,东经 119°13′-119°50′,地处江淮平原南端,苏中地区。
高邮市主要农作物以水稻和大豆为主,在苏中地区中水稻种植具有代表性。高邮的水稻多以中稻为主,生长期为6月中旬到10月中旬。

图1 高邮市
2.2 数据及预处理
2.2.1 环境星数据
环境星是较新国产卫星,并以5.1%的使用频率应用于农作物识别与监测领域[11]。本文获取的环境星数据为环境星A和B两颗卫星搭载的CCD相机获取,空间分辨率为30m,共蓝、绿、红、近红四个波段。
获取了2015年6到9月的共8景影像,分别为2015年6月1号、6月19号、7月20号、8月4号、8月20号、9月11号、9月20号、10月9号。其中6月19号、7月20号、8月20号以及9月20号数据用来进行质量检测。对所获得的影像进行辐射定标、几何纠正、大气校正以及裁剪等预处理。
2.2.2 MODIS数据
自MODIS数据可以使用后,其时间分辨率高成本低的优势,使其成为农情遥感监测的重要手段[12-13]。本文采用500米的MODIS09GA反射率产品,获取与HJ相同日期的影像。将所有的MODIS数据利用MODIS Reprojection Tool(MRT)工具采用最近邻域法重采样为30m分辨率,重投影为UTM-WGS84坐标系,数据格式转换为Geo-tif格式,提取出了蓝、绿、红和近红波段。
2.3 融合数据
2.3.1 STARFM
STARFM模型主要是从低空间分辨率数据获取时间信息,从中高空间分辨率获取空间信息,融合出高空间、高时间分辨率产品。高分辨率数据的反射率可用低分辨率数据的像元反射率表示:

其中 G(xi,yi,tk)为 tk时刻坐标为(xi,yi)处的高分辨率像元反射率;D(xi,yi,tk)为 tk 时刻坐标为(xi,yi)处的低分辨率像元反射率,εi为tk时刻高与低分辨率数据的反射率差值。则未知t0时刻的高分辨率数据的反射率可表示为:

(1)(2)两式相减可将t0时刻高分辨率的像元反射率表示为:

但是这只是地表覆盖类型在tk到t0期间不发生变化的一种理想情况,当土地覆盖类型在预测期内发生变化以及太阳几何双反射分布函数的改变导致预测期内的反射率变化时,则计算中心像元点的反射率时只选择移动窗口内与中心像元光谱相似且无云的像元进行计算:
其中:(xw/2,yw/2)是窗口中心的像元;Wijk为窗口内定各像元在预测中心的权重;Sijk、Tijk和Dijk分别为给定位置(xi,yi)的低空间分辨率和高空间分辨率数据反射率的差值、低空间分辨率t0时刻影像与tk时刻之间的反射率差值和中心像元点与参与计算的像元点的几何距离。三个参数的计算公式如下:


其中A是常数。
2.3.2 STAVFM
STAVFM算法是在STARFM算法的基础上对时间维的计算制定了新的规则,定义48天为有效的预测时间窗口半径,这样可以保证至少2期的有效数据的获取。使用窗口内预测期前后时间距离最小的两期数据进行预测,其具体方法是对预测期前后两期数据分别预测,对两个预测的结果取时间距离加权的平均:

2.4 融合精度验证与水稻分类评价
本文通过在研究区实地采样230个水稻采样点以及80个大豆采样点,用于融合精度验证以及水稻提取精度验证。计算两种算法融合结果与真实影像之间的近红外反射率决定系数,

SSR为回归平方和,SST为总离差平方和。即可比较出在此研究区域融合精度较高的算法。
使用此算法融合结果,提取关键物候期水稻采样点NDVI值,得出成熟水稻稳定NDVI值,使用决策树提取水稻面积。张晓忆等使用此方法提取了淮安地区的水稻种植面积[14]。再根据部分水稻采样点以及大豆采样点作混淆矩阵,用Kappa系数、总体分类精度、制图精度
3 结果与分析
3.1 融合结果
3.1.2 S TARFM融合结果
STARFM算法的数据融合配对方式为表1

表1 STARFM算法数据融合过程
输入模型中运算出的影像如图2:

图2 STARFM算法融合出来的影像
经过辐射定标大气校正以及裁剪等预处理过的实际环境星影像如图3

图3 真实HJ影像
提取实地获取的水稻采样点近红外反射率做散点图,得到融合数据与真实数据之间的决定系数图4:

图4 STARFM算法反射率散点图
四组数据的决定系数都大于0.7,融合效果较好,精度较高,符合水稻的反射率随其生育进程会发生规律的变化[15],
3.1.2 STAVFM算法融合结果
STAVFM需要两组数据来预测所需的数据,本实验所用的数据如表2

表2 STAVFM算法数据融合过程
输入模型运算出的影像如图5:
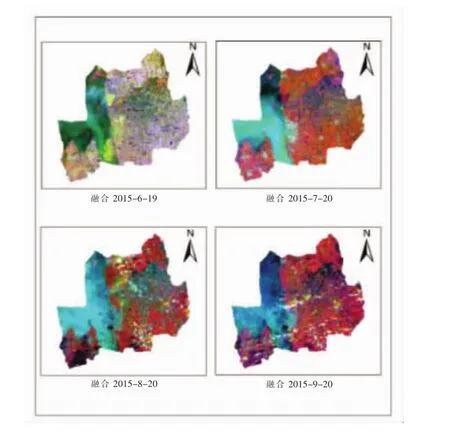
图5 STAVFM算法融合出来的影像
与图2的真实HJ影像相比,融合效果较差。提取采样点的近红外反射率进行精度评定如图6。决定系数R2在0.5左右,低于STARFM算法融合结果的决定系数值,由此可见STAVFM在此区域的融合效果不佳。
3.2 分析
由真实HJ影像可看出,6月中下旬的影像植被覆盖不明显,这与研究区的农作物类型有关系。6月正是高邮冬小麦收获的时期,小麦收割后,农田放水,进行水稻栽植,7月到10月之间土地覆盖类型基本稳定不变。
通过目视解译可看出STARFM算法在此区域的融合影像与真实获取的HJ影像相似度较高,效果较好,通过获取的近红外反射率散点图进一步验证了精度结果。决定系数取值范围在0-1之间,值越靠近1,说明相关程度越高,融合效果越好。STARFM算法的融合结果决定系数稳定在0.7-0.8,而STAVFM融合结果的决定系数只有0.5左右,所以STARFM算法的融合精度在此研究区域要高于STAVFM算法。本文将使用精度较高的STARFM算法的融合结果,来进行水稻面积的提取。

图6 STAVFM算法反射率散点图
4 水稻种植面积提取及分析
NDVI是反应作物生长情况的重要参数,提取STARFM算法得到的7月、8月和9月部分采样点的NDVI值。由图7可知,7月到8月的NDVI值呈现增长状态,8月稳定在0.7-0.8之间,9月20日的NDVI值与8月20日比有所降低,在0.6-0.7之间。这与NDVI与水稻的生长周期的关系[16]相吻合。本文选用8月20号的STARFM融合结果的NDVI进行水稻面积提取。

图7 STARFM算法反射率散点图

图8 水稻分类图
本文利用8月20日的NDVI数据通过决策树分类方法,得到水稻的分布图8,分类统计结果为480495000m2,即72.0747万亩。由农业部门获取到的2015年高邮地区的水稻种植面积为86.07万亩,两者的误差为16.3%,提取精度为83%。
混淆矩阵也称为误差矩阵,是表示精度评价的一种标准格式。其主要评价指标有:总体分类精度,指分类图像中正确分类的像元总数与总数像元比值;Kappa系数,用于评价图像分类结果的精度,计算公式为:

其中K是Kappa系数,r是误差矩阵的行数,Xii是主对角线上的值,Xi+和X+i分别是第i行的和与第i列的和,N是样点总数。
根据剩下的水稻采样点以及大豆采样点做混淆矩阵.,分类的精度为 87.2146%,Kappa系数为0.7060,分类效果高度一致,分类提取的结果有效。
5 结论
以江苏省高邮市为实验区,采用STARFM和STAVFM两种时空融合算法,将真实的环境星数据和MODIS 09GA产品进行反射率融合,得到高空间高时间分辨率特征的融合影像。并分别将两种融合结果与真实影像比较,可知STARFM的算法在高邮地区的融合精度较高。根据研究区的水稻物候,选择水稻识别关键时期的STARFM融合影像,获得高邮地区的NDVI影像,并利用决策树分类法实现了水稻分类,提取出了高邮地区2015年的水稻种植面积。与实际水稻种植面积相比,融合方法得到的水稻面积精度可以达到83%以上。研究结果:
(1)时空融合技术可以利用HJ数据和MODIS数据的融合数据代替水稻生长季节缺失或低质量数据。
(2)利用STARFM时空融合算法得到的融合影像效果较好,满足水稻面积提取的要求。
(3)STAVFM算法不适合研究区域的时空数据融合实验,在农作物变化较明显的时期应使用时间间隔较短的两组数据进行预测。
