长合成孔径时间多普勒解模糊成像处理算法
2018-02-13许成君段化军郑庆利
许成君,段化军,郑庆利
(1.中国人民解放军91404部队,河北 秦皇岛 066000; 2.中国人民解放军91604部队,山东 烟台 265701)
0 引言
因机载合成孔径雷达(Synthetic Aperture Radar,SAR)[1-3]是脉冲发射或接收体制,在方位向以一定大小的PRF发射频率来发射脉冲,通常回波信号的宽带大小等同于天线方向图主瓣波束的3 dB宽度。因此,以脉冲重复频率(Pulse Repetition Frequency,PRF)的值为采样频率对回波信号方位向进行采样,高于PRF的多普勒频谱将会被折叠在方位带宽上,同主信号重叠形成多普勒模糊,在利用匹配滤波器进行成像处理之后,得到的SAR图像就会出现方位向上的“虚像”,这就是方位向“欠采样”造成的[3-6]。因此,为满足机载SAR宽场景测绘的高分辨率成像要求,就必须有效解决方位模糊问题。
19世纪末20世纪初,科研工作者主要通过分析雷达回波信号模糊特性的模型,采用一系列滤波器的方法来滤除掉模糊分量而保留有用信号。Zhang Z在2001年第一次提出了采用3个滤波器来抑制因PRF采样率不够造成的多普勒模糊算法[7]。Goodman NA通过深入分析回波信号模糊特性,采用一种基于最大似然理论和最小均方误差准则设计滤波器来抑制回波信号中存在的模糊信号[8]。Guarnier AM在2005年提出一种基于自适应的多普勒模糊抑制方法[9],该方法的核心内容是设计基于维纳最小均方误差准则的带通滤波器来滤除混叠到多普勒频谱内的模糊分量。从上述3种方法分析可知,利用滤波器方式固然可以滤除模糊,但面对复杂多变的环境以及算法本身的局限性上述3种方法抑制效果并不理想。
目前研究人员已经提出多种有关方位多通道设计系统,该类系统以单相位或多相位区分点来分类多通道SAR系统,其中方位向采用多相位中心的多通道SAR系统是现在国内外应用最广的体制之一。Wang T在2006年提出在多通道SAR系统中利用旁瓣杂波与噪声系数的指标来评价最小二乘法(Least Square,LS)方法信号重建的性能,定量地分析了杂波以及噪声对LS方法的影响[10],说明了LS方法能有效抑制多普勒模糊同时提高了系统效率。但该方法存在缺点有一方面没有将旁瓣杂波和回波信号中的加性噪声做分开处理,另一方面也没有合理解决带宽对成像质量的影响。2009年,Gebert N针对方位多通道SAR系统主要研究分析了信噪比与方位模糊比2个主要参数对观测矩阵求逆方法的影响[11],该算法是从信号处理角度出发通过子带滤波和多通道重构来消除方位模糊,但并未考虑载机速度误差以及多余的副瓣模糊分量问题。Krieger G还提出了一种基于相位中心偏置(Displaced Phase Center,DPC)的多波束技术来抑制方位多普勒模糊算法[12],该算法能利用多通道的优势来抑制多普勒模糊,但容易受阵列误差的影响,因而系统稳健性较差。此外,还有一种基于空时自适应处理(Space-Time Adaptive Processor,STAP)技术抑制多普勒模糊的算法[13],该算法能自适应地对多普勒模糊能量抑制。但是该算法在载机速度有误差时或通道有误差时将会导致导引矢量失配问题。
基于上述分析可知,尽管方位多通道SAR系统为宽场景测绘带来了便利,但多波束SAR系统却面临着许多系统问题,诸如信号相消问题、方位非均匀采样问题、副瓣模糊分量的干扰问题和载机运行速度误差等问题。本文主要针对长合成孔径条件,研究了长合成孔径时间多普勒解模糊成像算法。由于飞机在整个飞行过程中速度不稳定,因此,在处理过程中将其分为若干个子孔径,在每个子孔径内载机速度可以被认为是稳定的,对每个子孔径分别进行处理最后再将其合成。对实测数据处理的结果验证了该方法的有效性。
本文主要分析了长合成孔径时间多普勒方位模糊特性;介绍了长合成孔径时间多普勒解模糊成像算法;通过实测数据处理验证了提出算法的有效性和实用性;并进行总结。
1 机载多通道SAR方位模糊信号特性分析
1.1 机载多通道SAR回波信号
在机载多通道SAR系统[14-16]中,通常采用各个接收通道线性排列并与载机运动方向平行。本报告假定机载雷达天线阵列为均匀线阵的情况,机载SAR几何构型如图1所示,天线阵元个数为N,载机以速度V沿x轴匀速飞行,成像区中目标点P到飞行航向的垂直距离为R0。

图1 机载SAR几何构型
假设在方位t时刻发射阵元的位置为x=Vt,则此时目标与第n个接收阵元的瞬时斜距为Rn(t),可表示为:
n=1,…,N,
(1)

(2)
式中,τ为距离维时间;λ为雷达发射波的波长;Kr为线性调频信号的调频斜率。
1.2 方位模糊特性分析
在宽测绘带机载SAR的系统设计中,一般采用较高的脉冲重复间隔来保证回波信号避免产生距离模糊,这就意味着更宽的测绘带需要更低的PRF。但是由于SAR系统在方位向的数据采集过程实际上就是以PRF在方位向上进行采样,因而采样频率需要满足奈奎斯特采样定律,即PRF要大于回波信号的多普勒带宽Bα,否则将造成方位欠采样问题。因此当满足宽测绘带的要求,必然导致系统的PRF往往不能满足奈奎斯特采样定律,这就造成了信号方位向上采样频率不够,引起频谱混叠现象,最终在成像处理中得到虚假目标,甚至影响成像的质量。
机载SAR的回波信号多普勒频率fd与方位角θ满足:
(3)
当PRF要大于回波信号的多普勒带宽Bα时,多普勒频率与空间角之间为线性关系如图2(a)所示,在系统的脉冲重复频率与多普勒带宽满足关系PRF=Bα/3时,本应该分布在整个[-Bα/2,Bα/2]范围内的回波频谱却混叠在[-PRF/2,PRF/2]内,从而造成了在[-PRF/2,PRF/2]频谱范围内的任意频率点具有3个值,不再与sinθ是一一对应的关系,如图2(b)所示。

图2 频率空间关系对比
为进一步展示方位模糊情况,现给出存在多普勒模糊和无多普勒模糊的SAR点目标仿真图,如图3所示。设定仿真中PRF值为210 Hz,回波信号多普勒带宽为628 Hz,即脉冲重复频率与多普勒带宽满足存在多普勒模糊时关系式PRF=Bα/3。方位无模糊结果剖面图如图3(a)所示。因此在实际情况中,由于方位上欠采样原因,往往造成了方位若干次模糊,这将严重降低了SAR成像质量;由于方位欠采样原因,回波信号经脉冲压缩后主瓣两边对称的位置出现虚假目标,如图3(b)所示。

图3 点目标仿真结果
基于以上分析,在满足宽测绘带的条件下,要想得到高分辨图像就必须考虑多普勒模糊问题。若不采取一定抑制模糊措施,则存在多普勒模糊的SAR图像将无法满足工程应用需求。然而在机载SAR系统实际飞行过程中,受运动气流的干扰,载机的航迹、速度和高度等运行参数都将受到干扰。速度误差对比如图4所示,当载机速度发生变化时,其各次模糊分量空时谱分布轨迹发生变化。如果根据理想载机速度设计方位解模糊滤波器,其性能必将大幅度下降。因此,实际应用中需要采取有效措施实时精确估计各次模糊分量多普勒频率与空间角度之间的对应关系,进而设计相应的方位解模糊滤波器。

图4 速度误差度对比
2 长合成孔径时间多普勒解模糊成像算法
针对长合成孔径时间内,载机速度不稳定导致的解模糊性能下降问题,采用如下处理算法:将数据分为若干个子孔径,当子孔径长度较短时,每个子孔径内载机速度可近似认为恒定,对每个子孔径分别进行多普勒解模糊处理,并最终解模糊后的子孔径数据进行拼接,实现最终成像。该方案的整体信号处理流程图如图5所示。
主要步骤如下:
① 对各个通道原始数据进行距离脉冲压缩处理;

③ 对每个子孔径数据做方位FFT处理,将数据变换至距离-多普勒域;
④ 在对各子孔径距离-多普勒域数据进行通道间空域自适应波束形成处理,实现多普勒解模糊,并将解模糊后的数据进行方位IFFT变换至慢时间域;
⑤ 将各自孔径解模糊后的数据进行拼接,得到解模糊后的全孔径数据,进行成像处理,得到最终的SAR图像。
子孔径分割、解模糊、拼接的示意图如图6所示。

图5 长合成孔径时间算法流程
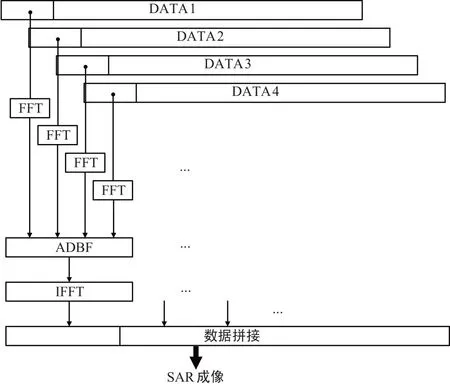
图6 子孔径处理示意
3 实测数据处理结果
为了验证提出的长合成孔径时间多通道SAR解模糊成像算法,将采用该算法对3组实测数据进行处理,3组数据均由某型Ku波段4通道机载SAR系统录取。为了获取多普勒模糊的数据,对原始数据在慢时间域进行了3抽1(即多普勒发生3次模糊)处理。数据的部分系统参数如表1所示。
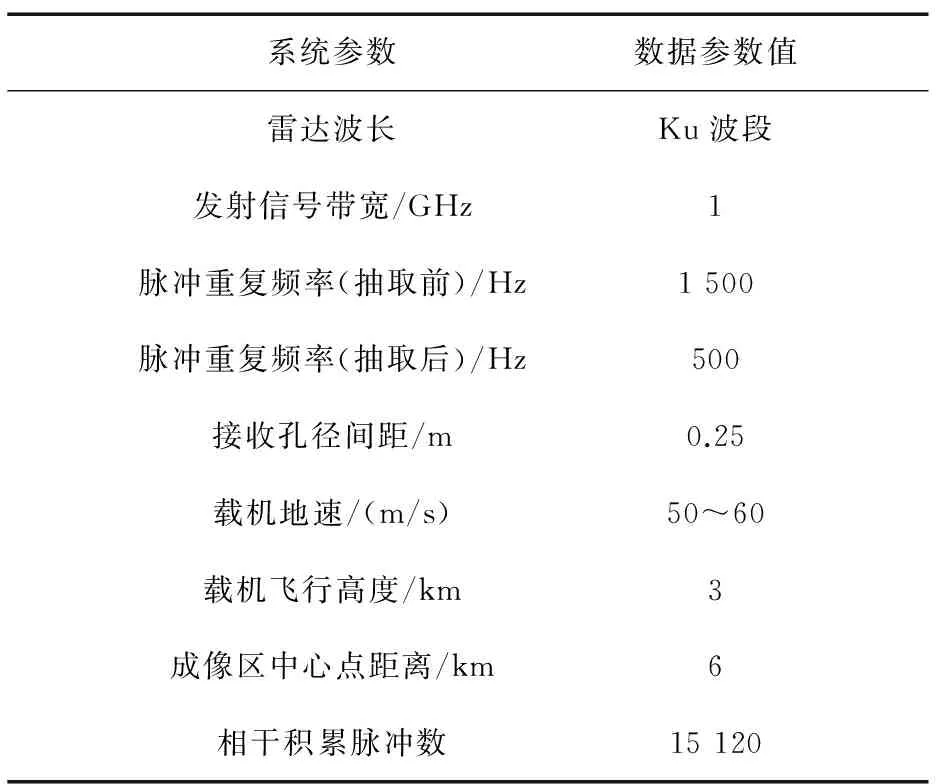
表1 四通道SAR实测数据系统参数
在处理中,将抽取后的全孔径数据(5 040个脉冲)分割为30个子孔径分别进行解模糊处理,再将解模糊后的数据进行拼接,获取解模糊后的全孔径数据(15 120个脉冲)并进行成像处理。
第1组数据处理中,某个子孔径数据解模糊前后的距离—多普勒(RD)谱(横向为方位,纵向为距离)如图7所示。其中,左图为不模糊数据的RD谱,中图为参考通道模糊数据的RD谱,右图为经过解模糊处理后RD谱,比较3幅图可以清楚看出,子孔径数据解模糊处理的有效性。

图7 实测数据子孔径解模糊前后RD谱对比
3组实测数据解模糊前后的成像结果(横向为方位,纵向为距离)分别如图8、图9和图10所示,其中,左图为多普勒模糊数据直接成像结果,右图为解模糊数据成像结果。

图8 第1组实测数据解多普勒模糊成像结果
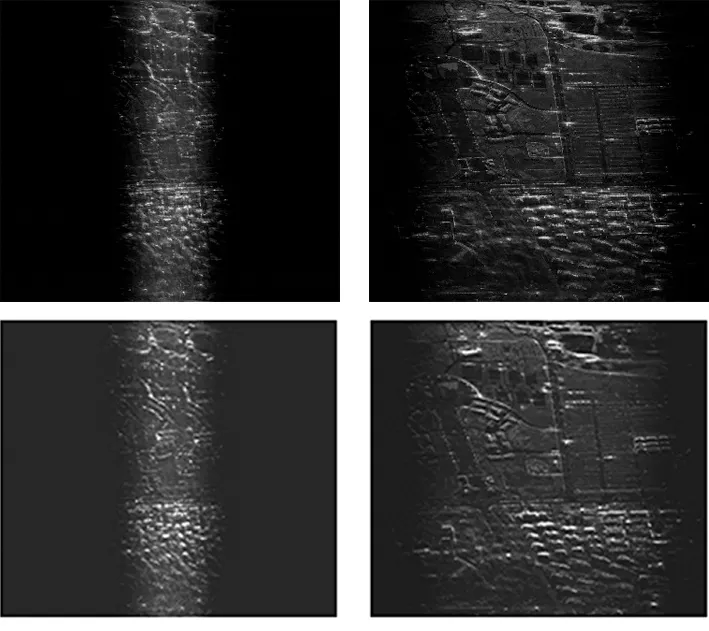
图9 第2组实测数据解多普勒模糊成像结果

图10 第3组实测数据解多普勒模糊成像结果
从图8、图9和图10可以看出,经过子孔径解模糊处理后,全孔径成像结果中已基本消除方位模糊现象,能够在PRF不足的条件下获取宽域高分辨率SAR图像。
4 结束语
针对长合成孔径条件下载机速度变化时的解模糊,研究了基于子孔径处理的解多普勒模糊成像算法。该算法将数据分为若干个子孔径,在每个子孔径内认为载机近似匀速运动,对每个子孔径分别进行处理,最后再将数据合成。对四通道的数据处理结果表明该算法可以有效解决多普勒模糊问题,能到得到宽域高分辨SAR图像。通过多组数据的处理,本算法可行,并且算法简单,具有比较大的推广性。
