柔性铰链可倾瓦轴承动静态特性研究
2018-02-10陈淑江熊文涛路长厚马金奎
陈淑江, 熊文涛, 路长厚, 马金奎
(山东大学 机械工程学院高效洁净机械制造教育部重点实验室, 济南 250061)
可倾瓦轴承具有超稳定特性,广泛应用于高速精密转子中[1]。然而,可倾瓦轴承结构复杂,加工装配要求高,易形成误差累积,需要高度精确的加工装配工艺才能满足使用要求;其次支点磨损及大的接触应力易引起疲劳损伤,由此放大径向误差;而且在使用过程中,有些顶部轴瓦可能会出现空载状态,处于不稳定平衡,极易发生振动,甚至轴瓦撑起与轴颈接触造成损伤。
现代加工技术的发展促进了可倾瓦轴承的创新设计,出现了柔性铰链可倾瓦轴承。采用电火花线切割加工技术,将轴瓦与轴承壳体通过弹性薄梁结构(柔性铰链)连接为一体,使其替代摆动支点。美国一些学者对此类轴承进行了实验及应用研究,给出了该轴承的加工方法,并获得这种轴承形式无轴瓦颤振和误差累积,无接触应力,允许轴线偏斜,且该轴承具有更低的能耗及良好的动态稳定特性,同时在实际工程应用中保证了使用可靠性[2-3]。De Choudhury等[4]对四瓦柔性铰链可倾瓦轴承进行了包括油液温升、流量、摩擦功耗及瓦温等静特性测量,较同规格的可倾瓦轴承具有更低的能耗。Zeidan也提供了二者的比较,并且注意到当转子低于第二临界速度时,普通可倾瓦轴承由于支点磨损会导致第二临界速度下降,使得共振点更接近转速,而柔性铰链可倾瓦轴承则无此问题。
Armentrout等[5]、Zeidan等[6]讨论了柔性铰链可倾瓦轴承设计参数和运行条件,并对轴承刚度和阻尼特性进行了研究。Armentrout等还讨论了铰链旋转刚度对轴承横向刚度、阻尼和稳定性的影响,并计算了铰链循环应力低于材料疲劳极限,保证轴承使用可靠性。Chen[7]给出了该可倾瓦轴承考虑铰链刚度的动态系数一般计算方法。
对柔性铰链可倾瓦轴承的一些性能实验测试。Walton等[8]测量了瓦间受静载条件下的轴承特性,得到轴承直接刚度随载荷增大而增大,而交叉耦合刚度则可忽略。San Andres等[9]继续补充了此前工作,将承载方式变为瓦上受载,同样获得良好特性。
综上可知,国外学者对该轴承的优越性能进行了相关研究,却未对柔性铰链结构及设计有详细阐述与研究。因此,本文结合柔性铰链的特性,针对一种椭圆型柔性铰链可倾瓦轴承,在柔性铰链刚度建模的基础上,通过建立轴瓦油膜厚度模型及轴颈和轴瓦受力平衡模型,采用有限差分法及牛顿迭代法,研究柔性铰链旋转刚度对轴承的动静态性能的影响规律,并提出满足高稳定性要求的柔性铰链旋转刚度数据范围,为柔性铰链可倾瓦轴承的设计应用提供参考。
1 柔性铰链计算建模
柔性铰链结构多样,主要分为直梁型、直圆型、椭圆型三种。将柔性铰链与轴承应用相结合,就是利用柔性铰链的旋转刚度小而径向刚度大的特点,从而保证轴瓦的旋转特性及轴承的承载能力。直梁型柔性铰链偏转位移大,但偏转精度低,直圆型柔性铰链则偏转位移小,而椭圆型柔性铰链具有较小的旋转刚度同时可保证旋转精度[10],因此根据轴承轴瓦旋转特性,柔性铰链选择椭圆型结构。
当轴瓦受到油膜力作用时,产生的等效油膜力和力矩会对柔性铰链产生附加的力和弯矩作用。就柔性铰链本身而言,其所受的复杂外力总是可以转化为通过柔性铰链一端的三维坐标轴上的力和弯矩的合成,而另一端为固定端。如图1所示,ξ-η为铰链计算坐标系,轴瓦等效作用力及力矩(Fξ,Fη,Mδ),t为铰链最小厚度,a,b为椭圆长短半轴,φmax为椭圆圆心角,h(φ)为圆心角φ处的铰链厚度,dφ,dx为计算微元。

图1 椭圆柔性铰链结构Fig.1 Calculation model of elliptical flexure hinge
柔性铰链柔度矩阵
(1)
则刚度矩阵为柔度矩阵的逆
(2)
其中轴瓦径向刚度和铰链旋转刚度分别为:
(3)
(4)
式中:具体柔度计算可参照文献[10]。
2 柔性铰链可倾瓦轴承计算建模
2.1 计算建模
如图2所示,坐标系XOY固结在轴承中心,O、OJ、Ok分别是轴承中心、转轴中心和第k块瓦块的圆心。φ为轴瓦坐标系下每个瓦块的弧坐标,φp为每个瓦块的支点位置角,e为偏心距,θ为偏位角,δ为瓦块产生扰动时铰链变形角,ξ-η为铰链计算坐标系,rs为转轴半径,rb为轴承半径,rp瓦块内表面半径,Ω为轴转动角速度。
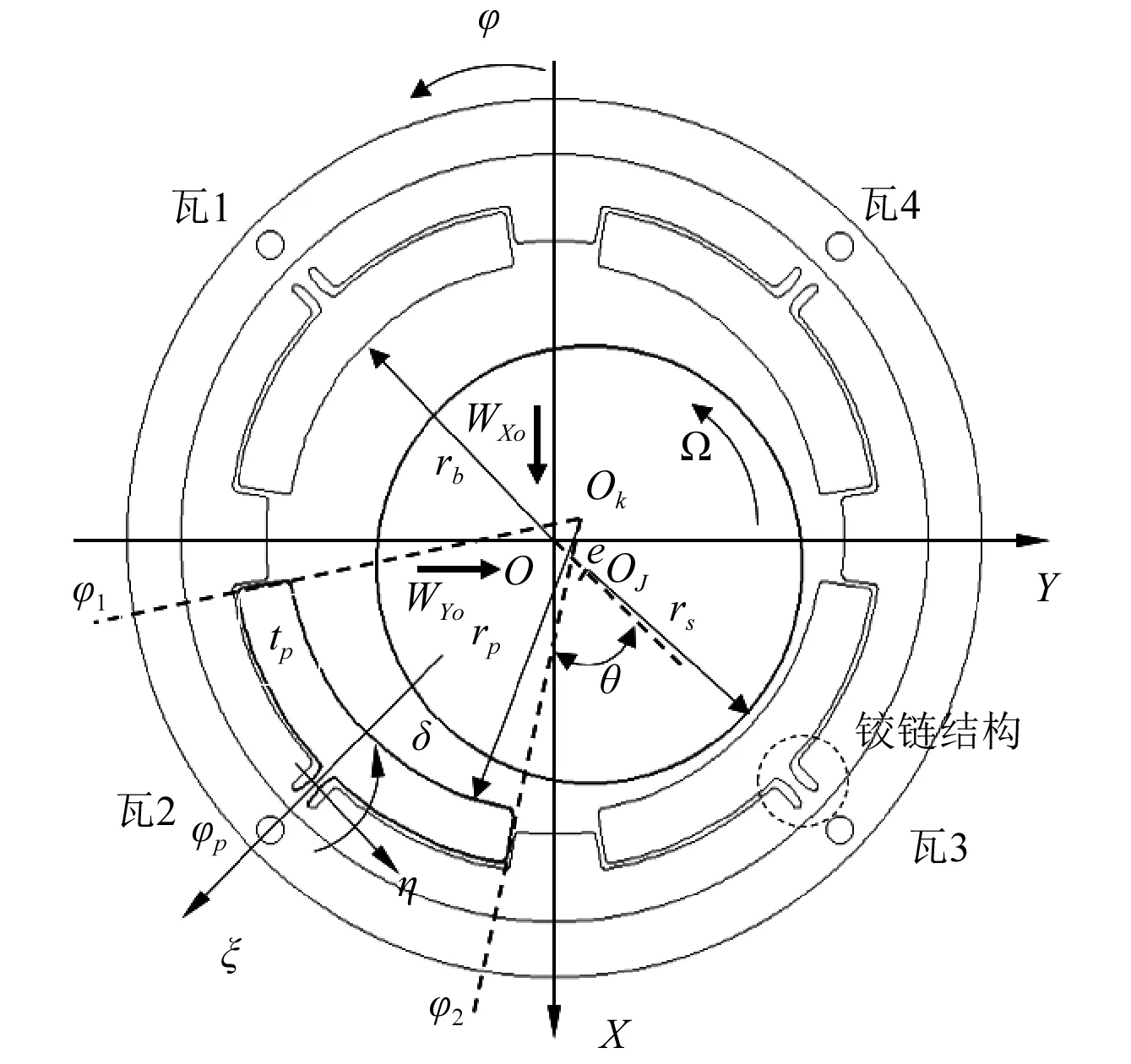
图2 柔性铰链可倾瓦轴承几何模型Fig.2 Calculation model of flexure-pivot tilting pad journal bearings
2.2 油膜厚度
由图2几何关系得到柔性铰链可倾瓦轴承第块轴瓦的油膜厚度表达式
hk=cp+eXcosφ+eYsinφ+(ξp-mcp)×cos(φ-φp)+(ηp-δpr)sin(φ-φp)
(5)
式中:cp为轴瓦间隙;eX、eY分别为轴颈中心的位移;m为预载荷系数。δp为瓦块产生扰动时铰链旋转角,ξp为瓦块的径向位移,ηp为横向位移。
令无量纲油膜厚度
(6)
2.3 雷诺方程
旋转轴颈与轴瓦内面之间形成油膜,产生油膜压力, 则无量纲雷诺方程为:
(7)
2.4 平衡扰动分析

(8)
(9)
则厚度随时间变化
(10)
其中油膜厚度增量
Δhk=ΔeXcosφ+ΔeYsinφ+Δξpcos(φ-φp)+(Δηp-Δδpr)sin(φ-φp)
(11)
油膜压力随时间变化
(12)
其中油膜力增量

(13)
在静态平衡位置压力(po)分布[11]有:
(14)
由轴颈中心位置运动产生的扰动压力(Pα)分布[11]为:

(15)
α=X,Y,hX=cosφ,hY=sinφ
对式(14)、式(15)无量纲化
(16)

(17)
由于扰动压力与平衡压力计算格式类似,故都采用有限差分法[12]和逐点松弛迭代法求解,平衡压力求取边界条件为雷诺边界条件,扰动压力求取边界条件为边界扰动压力为零。
3 平衡迭代计算
3.1 迭代流程图
采用牛顿迭代法寻找负载条件下轴颈及各轴瓦的平衡位置,采用MATLAB编程[13],并计算轴承性能,流程图如图3所示。
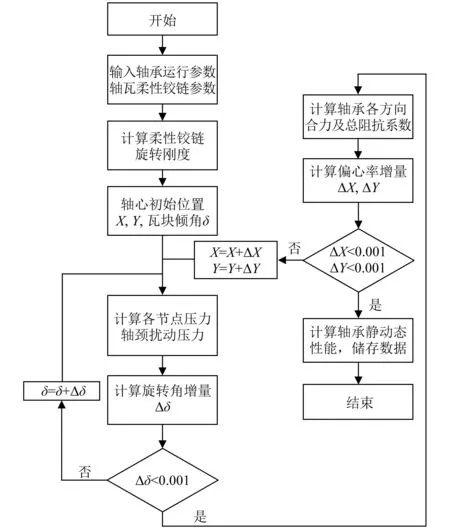
图3 迭代计算流程图Fig.3 Process of iterative calculation
3.2 轴瓦及轴颈受力分析
根据质量惯性矩及平行轴定理,瓦块对铰链支点的惯性矩为:
(18)
式中:ρ为材料密度;α为瓦块包角;R0为中心到支点的距离;r0是瓦块外表面半径,并假设铰链支点处于轴瓦外表面。
对第k块轴瓦油膜压力积分并无量纲化即得
(19)
由于轴瓦径向及横向刚度较旋转刚度大,故只考虑旋转弯矩Mδ对瓦作用,其中旋转弯矩
(20)
式中:r0=rp+tp,tp为轴瓦厚度。
普通可倾瓦轴承轴瓦在平衡时,油膜作用合力矩为0,而柔性铰链旋转变形时存在反力矩Mpδ为:
(21)

油膜力及力矩由静态和动态两部分组成,设Z=K+iωC,则轴瓦受力表达式为:
(22)
轴瓦旋转产生的动态压力区域满足以下关系:
pδ=r0(pXsinφp-pYcosφp)
(23)
则阻抗矩阵各系数为:
(24)
α=X,Y,δ
其中油膜力阻抗系数及轴承等效阻抗系数为:
(25)
α,β=X,Y
(26)
3.3 轴颈平衡迭代
轴颈平衡位置第N次与第N+1次迭代,轴颈水平及竖直位置及各轴颈位移增量为:
(27)
(28)
式中:WX、WY分别为两个方向上的不平衡载荷。
3.4 轴瓦旋转平衡迭代
轴瓦平衡位置第N次到第N+1次迭代,轴瓦位置转角和轴瓦旋转位移增量分别为:
(29)
(30)
4 算例与分析
根据动静态特性及稳定性计算公式,讨论了不同柔性铰链旋转刚度下轴承特性变化,并根据铰链旋转刚度大小将整个区域分为可倾瓦区域、转换区域、固定瓦区域。计算轴承参数如表1所示。
柔性铰链可倾瓦轴承的特性位于固定瓦轴承与传统可倾瓦轴承之间,取决于轴瓦铰链支承的旋转刚度。当铰链旋转刚度较大时,柔性铰链轴承表现为固定瓦轴承;当铰链旋转刚度较小时,则表现为可倾瓦轴承。如图4所示,轴心平衡位置随着铰链旋转刚度的增加,轴心平衡位置偏离竖直方向,即偏位角越大。当铰链旋转刚度小时,轴心平衡位置靠近竖直方向,表现为可倾瓦轴承特性,偏心距小;当旋转刚度大时,表现为固定瓦轴承特性,偏心距大。
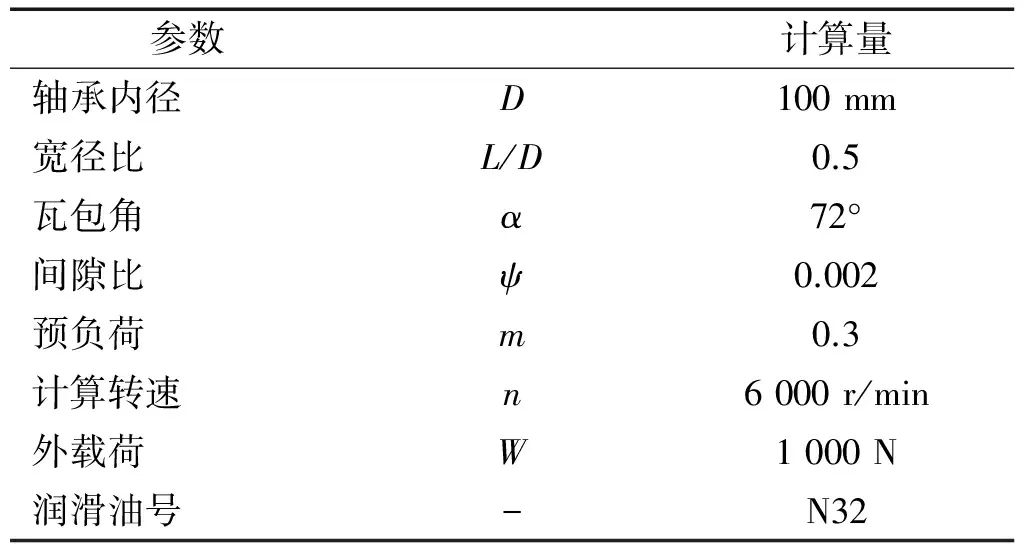
表1 轴承计算参数表

图4 轴心平衡位置与铰链旋转刚度关系Fig.4 Shaft center eccentricity vs rotational stiffness
如图5、6所示,随着铰链旋转刚度增加,轴承摩擦因数及功耗在进入转换区域出现减小,表明柔性铰链可倾瓦轴承较可倾瓦轴承有更小的功耗。当进入转换区域轴承流量增大,温升则减小,最终到达固定瓦区域则继续保持基本不变。由此可见,柔性铰链可倾瓦轴承比固定瓦轴承具有更小流量,油的温升则高一些。这是因为在同等承载力下,柔性铰链可倾瓦轴承由于轴瓦能够在油膜力作用下发生偏转,形成更薄的楔形油膜,产生较大的承载力,因此流量更小,温升更大。图7所示为各瓦摆角及最小油膜厚度(位于轴瓦终止边)随铰链旋转刚度变化的规律,各瓦摆角在可倾瓦区域保持不变,到达转换区域则变小,到达固定瓦区域则变为0。最小油膜厚度对上部瓦1和瓦4油膜厚度则逐渐增大,可见由于轴瓦的旋转使最小油膜厚度减小20%,而作为主要承载瓦,下部瓦2和瓦3油膜厚度则先增大后减小。

图5 流量/温升与铰链旋转刚度关系Fig.5 Bearing flow & temperature rise vs rotational stiffness
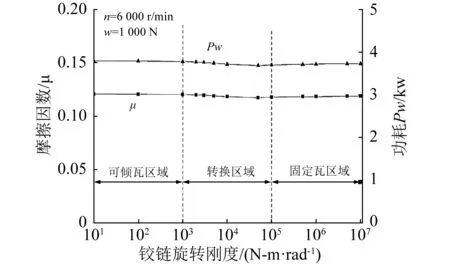
图6 摩擦因数/功耗与铰链旋转刚度关系Fig.6 Friction factor & power loss vs rotational stiffness
图8和图9表明了四瓦柔性铰链可倾瓦轴承在n=6 000 r/min,W=1 000工况下,采用图2所示的瓦块布置形式时,轴承的主刚度、交叉耦合刚度以及阻尼随铰链旋转刚度的变化规律,当铰链旋转刚度减小时,交叉耦合刚度很小,几乎为零,轴承表现为可倾瓦轴承特性,当铰链旋转刚度增大时,交叉耦合刚度以相反的符号对称增加,而主刚度变化则始终保持一致,但在固定瓦区域迅速减小,表现为固定瓦轴承特性。阻尼则与铰链旋转刚度关系不大,始终保持不变,只是在转换区域有微小的变动。
ZEIDAN在文献[14]中给出了交叉耦合刚度对转子动力不稳定性影响的解释,他指出作用于转子的不稳定性正比于交叉耦合刚度差。因此,固定瓦轴承由于交叉耦合刚度差较大,相应的固定瓦轴承支承的转子稳定较差,而可倾瓦轴承支承的转子则相反,稳定性较高。

图7 各瓦摆角/最小油膜厚度与铰链旋转刚度关系Fig.7 Min film & pad rotational angle vs rotational stiffness

图8 轴承刚度与铰链旋转刚度关系Fig.8 Stiffness coefficients vs rotational stiffness
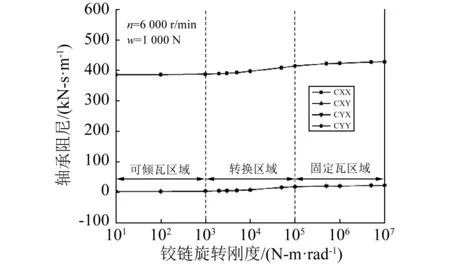
图9 轴承阻尼与铰链旋转刚度关系Fig.9 Damping coefficients vs rotational stiffness
图10为柔性铰链旋转刚度对轴承的涡动频率比及轴承交叉刚度的影响曲线。交叉耦合刚度差随铰链旋转刚度的变化规律与涡动频率比是一致的。而通常涡动频率比被用来表示轴承的稳定性。对固定瓦轴承而言,涡动频率比为0.5,数值上最大可实现的稳定转速为转子固有频率的2倍;而可倾瓦轴承涡动频率比则为0,从交叉耦合刚度差引起的不稳定能也能得出可倾瓦轴承的稳定性较高。而柔性铰链可倾瓦轴承由于结构的原因,铰链旋转刚度一般低于5 000 N·m/rad,由此涡动频率比低于0.1,由此可实现的稳定速度较固定瓦轴承提高了5倍;而当铰链旋转刚度低于1 000 N·m/rad时,可达到可倾瓦轴承的较高稳定性。

图10 涡动频率比/交叉耦合刚度差与铰链旋转刚度关系Fig.10 Whirl frequency ratio & difference cross-coupled stiffness coefficients vs rotational stiffness
由以上分析可知,在铰链设计时保证铰链旋转刚度在1 000 N·m/rad以内时,可达到类似于普通可倾瓦轴承的稳定性要求。因此可以根据柔性铰链刚度计算公式设计旋转刚度对应于1 000 N·m/rad以内的柔性铰链结构及参数。
5 结 论
(1)柔性铰链可倾瓦轴承作为一种新型轴承,在保证一定的稳定性的同时,具有很好的支承刚度,较同等规格的可倾瓦轴承有更低的功耗和温升。
(2)柔性铰链旋转刚度越小,轴承的交叉耦合刚度之差与其涡动频率比越小,轴承性能越接近传统可倾瓦轴承特性,因此通过合理设计,采用柔性铰链结构替代传统可倾瓦轴承的摆动支点不仅可大幅度简化轴承结构,还可以可满足可倾瓦轴承的稳定特性。
(3)在本文的研究条件下,当柔性铰链旋转刚度在低于1 000 N·m/rad时,可以获得较好的轴承综合性能。因此在设计柔性铰链可倾瓦轴承时,可参照最高柔性铰链旋转刚度设计对应的铰链结构参数。
[ 1 ] 张直明. 计入支点弹性和阻尼时可倾瓦轴承支撑的转子系统的动力稳定性[J]. 机械工程学报, 1983,19(2):9-21.
ZHANG Zhiming. Rotor system’s dynamic stability with the titling-pad journal bearing reckoning in pivot stiffness and damping[J]. Chinese Journal of Mechanical Engineering, 1983, 19(2): 9-21
[ 2 ] ZEIDAN F. Developments in fluid film bearing technology [J]. Turbomachinery International, 1992, 33(6): 24-31.
[ 3 ] ANDRÉS L S. Turbulent flow, flexure-pivot hybrid bearings for cryogenic applications [J]. Journal of Tribology, 1996, 118(1): 190-200.
[ 4 ] DE CHOUDHURY P, HILL M R, PAQUETTE D J. A flexible pad bearing system for a high speed centrifugal compressor [C]. 1992: 187-209.
[ 5 ] ZEIDAN F, PAQUETTE D J. Application of high speed and high performance fluid film bearings in rotating machinery [C]. Proceedings of the Twenty Third Turbomachinery Symposium,1994: 147-169.
[ 6 ] ARMENTROUT R W, PAQUETTE D J. Rotor dynamic characteristics of flexure-pivot tilting-pad journal bearings [J]. Tribology Transactions, 1993, 36(3): 443-451.
[ 7 ] CHEN W J. Bearing dynamic coefficients of flexible-pad journal bearings [J]. Tribology Transactions, 1995, 38(2): 253-260.
[ 8 ] WALTON N V, ANDRÉS L S. Measurements of static loading versus eccentricity in a flexure-pivot tilting pad journal bearing [J]. Journal of Tribology, 1997, 119(2): 297-304.
[ 9 ] ANDRÉS L S, JACKSON M C. Measurements of the static load (on pad) performance and pad temperatures in a flexure-pivot tilting-pad bearing [J]. Tribology Transactions, 1998, 41(2): 225-232.
[10] 陈贵敏, 刘小院, 贾建援. 椭圆柔性铰链的柔度计算[J]. 机械工程学报, 2006, 42(增刊1): 111-115.
CHEN Guimin, LIU Xiaoyuan, JIA Jianyuan. Compliance calculation of elliptical flexure hinge [J]. Chinese Journal of Mechanical Engineering, 2006, 42(Sup1): 111-115.
[11] 李元生, 敖良波, 李磊, 等. 滑动轴承动力特性系数动态分析方法[J]. 机械工程学报, 2010, 46(21): 48-53.
LI Yuansheng, AO Liangbo, LI Lei, et al. Dynamic analysis method of dynamic character coefficient of hydro-dynamic journal bearing[J]. Chinese Journal of Mechanical Engineering, 2010, 46(21): 48-53.
[12] 谢帆, 荆建平, 万召, 等. 基于有限差分法的径向滑动轴承油膜压力分布计算[J]. 润滑与密封, 2012, 37(2): 12-15.
XIE Fan, JIN Jianping, WAN Zhao, et al. Calculation of oil film pressure distribution of journal bearing based on finite difference method [J]. Lubrication Engineering, 2012, 37(2): 12-15.
[13] 敏政, 王乐, 魏志国, 等. 基于MATLAB技术的滑动轴承油膜压力分布的模拟[J]. 润滑与密封, 2008, 33(8): 51-53.
MIN Zheng, WAN Le, WEI Zhiguo, et al. Simulation on pressure distribution of sliding bearing based on MATLAB technology [J]. Lubrication Engineering, 2008, 33(8): 51-53.
[14] ZEIDAN F. Fluid film bearing fundamentals and failure analysis [C]. Proceedings of the 20th Annual Turbomachinery symposium, 1991: 161-186.
