纯电动汽车复合电源系统控制的仿真研究*
2018-02-05霍春宝门光文王京马涛
霍春宝 门光文 王京 马涛
(1.辽宁工业大学,锦州 121001;2.辽宁省电力有限公司锦州供电公司,锦州 121001)
1 前言
由超级电容与蓄电池组成的复合电源可以有效提高电动汽车的动力性能。为了充分发挥复合电源的优越性,必须制定高效合理的控制策略,因此,功率分配控制策略成为复合电源的研究热点之一。目前,复合电源的控制策略主要有逻辑门限控制、实时优化控制、全局优化控制和模糊控制等[[11]],逻辑门限控制策略的灵活性较差,在情况复杂多变的工况下控制效果一般;实时优化控制策略因控制量多,计算量大,因其由芯片实现实时控制成本较高,很难在电动汽车上推广应用;全局优化控制策略能够在汽车循环工况下实现全局最优,但是由于很难预测实际车辆的当前工况,因此实际应用较困难;模糊控制策略在解决复合电源系统的能量分配问题时无需建立对象的数学模型,具有适应性和鲁棒性强,且操作简单、较易实现,因此该策略在电动汽车上应用较多。
为探究控制效果更加优越的复合电源控制策略,本文将分别基于模糊控制和模糊神经网络设计了复合电源的功率分配策略,并应用于搭建的复合电源纯电动汽车仿真模型,同时在CYC-ECE和CYC-UDDS两种道路循环工况下进行了仿真验证。
2 复合电源系统结构
复合电源系统一般由动力电池、双向DC/DC变换器和超级电容3部分组成。根据双向DC/DC变换器数量及位置的不同,并综合考虑电源效率和控制的难易程度,本文选择如图1的复合电源系统结构,其超级电容与双向DC/DC变换器串联后再与动力电池并联共同向负载提供能量[[22]]。
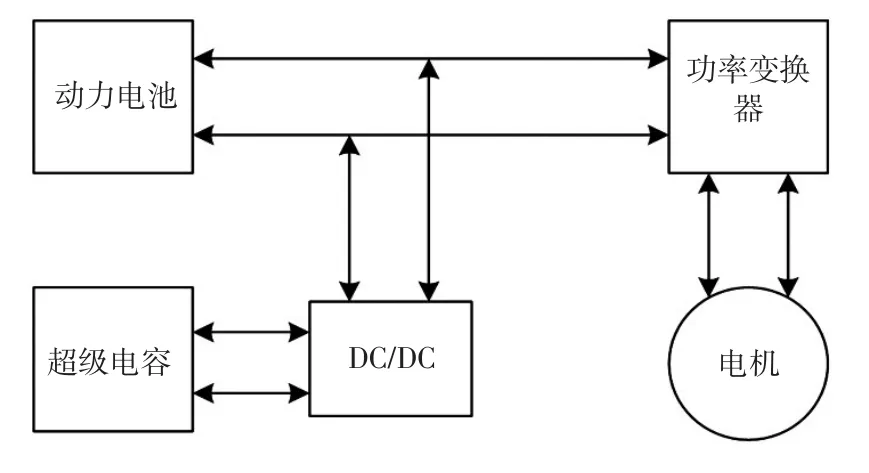
图1 复合电源系统结构
3 复合电源控制策略设计
复合电源控制策略的设计是以保证电动汽车动力性能为前提,充分利用超级电容大电流充、放电的特性,同时降低频繁大电流充、放电对蓄电池的影响,延长蓄电池的使用寿命,增加再生制动回收的能量,提高电动汽车的续驶里程和整车动力性能。
复合电源的功率流动模型如图2所示。图2中,Preq为电机的需求功率(双向传递),Preq为正时表示功率向车轮方向传递,此时为电机的驱动功率;Preq为负时表示功率向蓄电池和超级电容方向传递,此时电动机作为发电机运行,向复合电源系统进行充电,即复合电源吸收汽车再生制动产生的能量。Pbat为蓄电池的充放电功率,Puc为超级电容的充放电功率,两者均为双向传递,为正时表示放电状态,向驱动电机提供驱动能量;为负时表示充电状态,吸收车辆再生制动的能量。

图2 复合电源功率流模型
理想状态下,不计系统的能量损耗,复合电源系统中电机的需求功率Preq(t)、蓄电池的充放电功率Pbat(t)及超级电容的充放电功率Puc(t)满足如下关系:

3.1 模糊控制策略
在逻辑门限控制策略的基础上,通过对逻辑门限值进行模糊化处理即得到电动汽车复合电源功率分配的模糊控制策略[[33]]。
为了使超级电容和蓄电池都能工作在最佳状态,需要对两者的荷电状态进行限制,因此,控制规则制定的过程中对超级电容和蓄电池SOC进行如下约束:

式中,SOCb为蓄电池的荷电状态;SOCb-min与SOCb-max分别为蓄电池荷电状态的最小值和最大值;SOCc为超级电容的荷电状态;SOCc-min与SOCc-max分别为超级电容荷电状态的最小值和最大值。
蓄电池提供的功率占电机所需总功率的比例定义为功率分配因子Kb:
式中,Pb为蓄电池提供的功率;Preq为电机的需求功率;Pbat为蓄电池的充放电功率;Puc为超级电容的充放电功率。
将汽车需求功率Pr、蓄电池的荷电状态SOCb和超级电容的荷电状态SOCc作为模糊控制器的输入,蓄电池得到的功率分配因子Kb作为输出,设计了具有三输入一输出的模糊控制器。控制器的隶属函数选用三角形函数,输入Pr的论域为[-0.2 1],模糊集合为{NB、NM、NS、ZE、PS、PM、PB};SOCb的论域为[0.2 1],模糊集合为{LE、ME、GE};SOCc的论域为[0.2 1],模糊集合{LE、ME、GE};输出Kb的论域为[0 1],模糊集合为{LE、ML、ME、MB、GE}。输入、输出隶属函数如图3所示。


图3 输入、输出隶属函数
模糊控制器的仿真模型如图4所示。
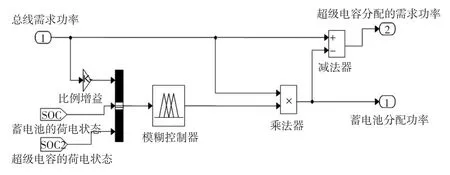
图4 模糊控制器仿真模型
3.2 模糊神经网络控制策略
在模糊控制策略的基础上,引入神经网络的思想,对模糊控制算法进行优化,设计基于模糊神经网络的控制策略,模糊神经网络算法可由自适应神经模糊推理系统[4]实现。
根据复合电源系统的特点,设计了一种三输入一输出的一阶T-S型模糊神经网络,即自适应模糊神经网络(Adaptive Neural-network-based Fuzzy Interference System,ANFIS)。其中,输入为需求功率Preq、超级电容SOCc和蓄电池SOCb;功率分配比例因子Kb作为输出,且输出为输入的线性关系。
以所设计的ANFIS模糊神经网络为基础,利用软件MATLAB中的Anfisedit工具箱搭建自适应模糊神经网络控制器,该工具箱可以完成ANFIS网络的搭建和训练工作[[55]]。ANFIS模糊神经网络控制器生成流程如图5所示。
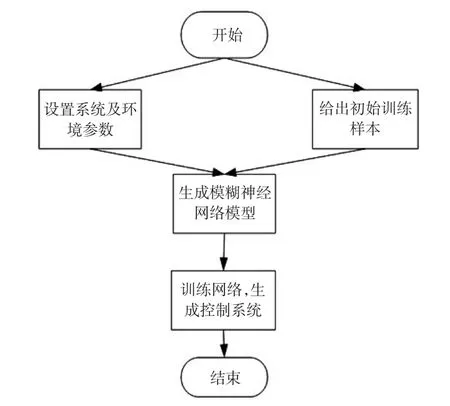
图5 ANFIS模糊神经网络控制器生成流程
3.2.1 获取样本数据
模糊神经网络控制器的设计需要对大量的样本数据进行训练和自适应学习。因此在所设计的模糊控制器的基础上,利用对模糊控制器的仿真试验来获取所需样本数据。在ECE循环工况下分别采集模糊控制器的输入Pr、SOCb、SOCc和输出Kb等数据,即 data=[PrSOCb SOCcKb];各取100对数据分别作为训练数据data1和校验数据data2。
3.2.2 sugeno型的FIS系统设计
MATLAB中的anfis是用于训练sugeno型模糊推理系统的工具箱,首先利用anfis工具箱的图形用户接口设置系统的三输入与单输出变量,输入分别为Pr、SOCb和SOCc,输出为Kb;然后选择高斯型隶属函数个数,分别为7、3、3;输出类型选择线性输出(linear),如图6a所示;采用网格分割法(Grid partition)生成的初始FIS系统,如图6b所示。
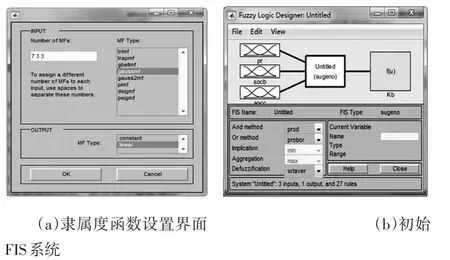
图6 sugeno型的FIS系统编辑界面
3.2.3 初始FIS训练
在工具箱中设置训练误差精度为0,训练次数为50次,学习方法采用混合学习方法(hybrid方法)。训练后的误差曲线如图7所示,经过50次训练后误差减小到0.08附近。
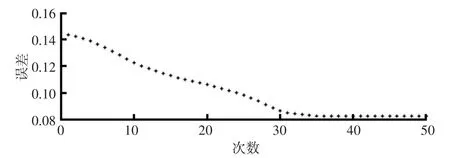
图7 训练误差曲线
ANFIS 训练后得到的的输入变量Pr、SOCb、SOCc的隶属函数曲线及控制器的输出如图8所示。将训练后的变量导入控制器并添加到复合电源系统的仿真模型中进行仿真。
4 仿真研究
在汽车仿真软件ADVISOR2002中搭建的纯电动汽车模型VEH_SMCAR的基础上,加入超级电容、DC/DC变换器和功率分配策略搭建复合电源的电动汽车整车仿真模型,如图9所示。

图8 隶属函数曲线及控制器输出
将所设计的2种控制器分别加入到复合电源的整车仿真模型中,电池的初始温度设置为20℃,仿真工况选择CYC-UDDS和CYC-ECE循环工况。复合电源参数见表1,其余仿真参数均采用VEH_SMCAR车型文件的默认设置参数。
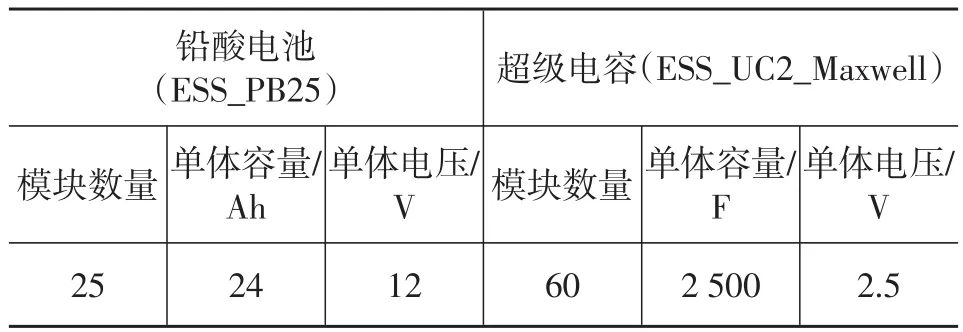
表1 复合电源参数
在CYC-UDDS工况下对复合电源电动汽车进行仿真分析,仿真结果如图10所示。由图10可看出,加入超级电容组成复合电源后,整车输出能够很好地跟随工况;复合电源中的蓄电池电流明显比单一电池减小,避免了大电流充、放电现象的发生;蓄电池的SOC减小的趋势变缓,SOC直接对应电池的电量,因此电动汽车的续驶里程增加;超级电容的SOC发生频繁的变化,最小值出现在设计的0.2处,说明超级电容可以发挥“削峰填谷”和回收制动能量的作用;蓄电池的温度在工况结束后也低于单一蓄电池,说明超级电容能够起到保护蓄电池的作用,蓄电池的寿命得以延长。
在CYC-ECE循环工况下,对所设计的控制策略进行仿真研究,单一蓄电池与复合电源的蓄电池在不同功率分配策略下的仿真结果如图11所示。由图11a可看出,在模糊控制策略和模糊神经网络控制策略下,复合电源中蓄电池电流峰值明显小于单体蓄电池的电流峰值,说明加入超级电容后对蓄电池起到了很好的保护作用;两种控制策略下复合电源中蓄电池电流变化更灵活,充分发挥了超级电容的主动性;由图11b可看出,复合电源中蓄电池SOC变化比单一蓄电池明显变小,很好地节省了蓄电池的电量,从而延长了电动汽车的行驶里程;在模糊控制和模糊神经网络控制策略下,复合电源中蓄电池SOC变化趋势明显减缓,其中模糊神经网络控制策略下蓄电池的SOC变化最小,蓄电池电量节省最多,电动汽车续驶里程的增加效果也更好。
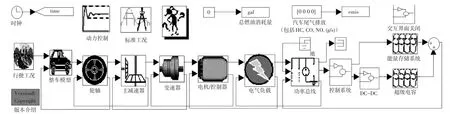
图9 复合电源电动汽车仿真模型
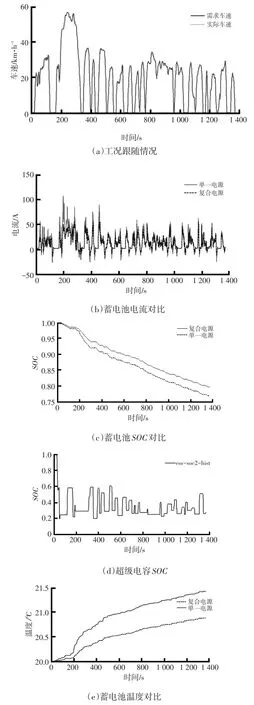
图10 仿真结果

图11 单一电池及不同功率分配策略下的仿真结果
5 结束语
以蓄电池和超级电容组成的复合电源为研究对象,制定了模糊控制和模糊神经网络的两种功率分配控制策略,利用汽车仿真软件ADVISOR2002和Matlab/Simu⁃link进行了联合仿真。结果表明,超级电容的加入使蓄电池的电流明显减小,SOC变化变缓,提高了蓄电池的性能。与逻辑门限控制策略相比,模糊控制和模糊神经网络控制策略的控制推理能力更强、鲁棒性更好。综合蓄电池电流和SOC两方面,模糊神经网络的控制效果优于模糊控制策略,验证了模糊神经网络在功率分配中的可行性。
[1]陆建康,杨正林,何小明,等.纯电动汽车复合电源系统仿真研究[J].汽车科技.2011(5):37-41.
[2]倪颖倩.电动汽车关键技术——复合电源的研究[D].南京:南京理工大学,2010.
[3]王儒,李训明,魏伟,等.基于ADVISOR的纯电动汽车复合电源系统[J].山东理工大学(自然科学版),2014,28(1):74-78.
[4]陈慧勇,吴光强.混合动力汽车补偿模糊神经网络能量管理策略[J].同济大学校报(自然科学版),2012,37(4):521-525.
[5]牛培峰,张密哲,陈贵林.自适应模糊神经网络控制在锅炉过热气温控制中的应用[J].动力工程学报,2011,31(2):110-115.
