新型杆齿滚筒式残膜捡拾机构的设计与试验
2018-01-31刘进宝刘兴爱葛士林
刘进宝,郑 炫,赵 岩,刘兴爱,葛士林
(1.新疆科神农业装备科技开发股份有限公司, 新疆 石河子 832000;2.新疆农垦科学院机械装备研究所, 新疆 石河子 832000; 3.中国农业大学工学院, 北京 100083)
田间残膜回收难题目前还未得到有效的解决,目前,残膜回收主要由播前回收、苗期回收和收获后回收三种回收工艺,机型主要有齿式、铲式、链式、卷膜式、气吸式等结构,作业模式大致分为单一作业、秸秆还田残膜回收联合作业和整地残膜回收联合作业[1-4]。
目前,弹齿式残膜捡拾机构主要有凸轮滑道弹齿滚筒式和伸缩杆齿滚筒式。凸轮滑道弹齿滚筒式捡膜机构应用较为广泛,主要由滚筒、凸轮盘、凸轮轴、弹齿等构成,滚筒绕凸轮轴转动,弹齿上的滚轮轴沿着凸轮槽轨道滑动,其中凸轮轴与滚筒不同轴,运动时,弹齿相对滚筒表面做伸缩运动,弹齿形状有弧形和直杆两种。但是凸轮滑道的设计及加工具有一定的难度,凸轮工作时磨损严重[5-10]。伸缩杆齿滚筒式捡膜机构主要利用偏心轮的原理设计,伸缩杆齿转子与偏心滚筒同步转动,从而实现捡膜与脱膜的功能。伸缩杆齿适用于平整地块,但是在滚筒上的圆孔与杆齿之间存在夹膜现象,导致滚筒出现拥堵,并且弹齿作业时碰到硬物而产生变形,使弹齿无法从滚筒圆孔中缩回[11-15]。
现有的残膜回收方式无法解决回收残膜运输的难题,为此新疆农垦科学院提出了新型棉田残膜回收工艺[16],大致分为四道工序:(1) 秸秆粉碎还田机先开出集条膜堆卸膜区; (2) 立杆搂膜机将回收残膜堆积在集条膜堆卸膜区; (3) 残膜捡拾打捆机对集条膜堆捡拾打捆作业; (4) 装载运输回收压缩膜捆。而残膜捡拾打捆机是一种新型残膜回收机具,其捡膜机构采用新型弹齿滚筒式结构,捡膜机构的作业可靠性将直接影响残膜捡拾率。
1 杆齿滚筒式残膜捡拾机构
残膜捡拾打捆机主要捡拾集条后的残膜,集条后的残膜特点是地膜集中在土壤表面,掺杂有秸秆、少量碎土等杂质,集条残膜具有一定的厚度,在不同深度都有分布。弹齿在作业时将残膜从杂质中挑出,在捡拾时弹齿不需要入土很深,因此,设计了一种新型的杆齿滚筒式残膜捡拾机构,其结构如图1所示。
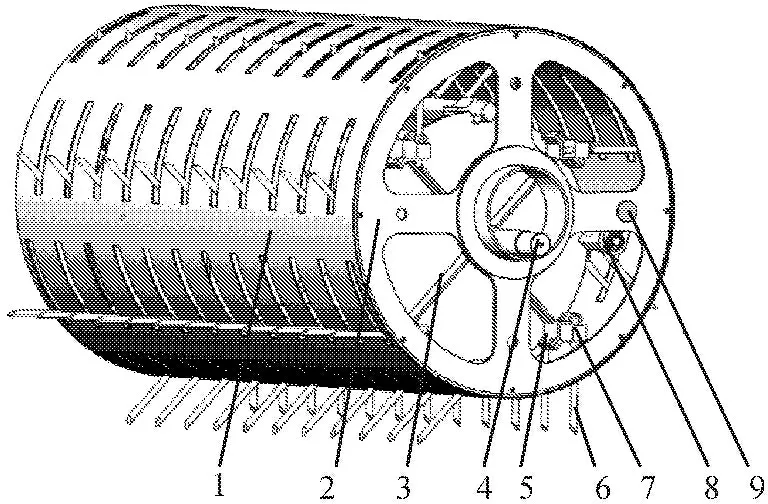
1.偏心滚筒; 2.滚筒法兰盘; 3.转轴盘; 4.杆齿转轴; 5.卡子; 6.杆齿; 7.方钢; 8.连杆; 9.销轴
1.Eccentric roller; 2.Roller flange; 3.Shaft plate; 4.Rod-tooth shaft; 5.Clip; 6.Rod-tooth; 7.Square; 8.Connecting rod; 9.Pin shaft
图1捡膜机构结构
Fig.1 The structure of pickup film mechanism
偏心滚筒与滚筒法兰盘组成滚筒总成;杆齿转轴、转轴盘、伸缩杆齿、方钢组成伸缩杆齿总成,杆齿转轴与转轴盘焊接,杆齿方钢通过卡子固定在转轴盘上,杆齿以一定的角度安装在杆齿方钢上。其中杆齿转轴通过轴承座安装在机架上;偏心滚筒通过支撑件与机架相连,偏心滚筒可绕滚筒轴心转动。杆齿总成和滚筒总成通过连杆铰接。安装后偏心滚筒相对于杆齿转轴具有一个偏心距。
由于伸缩杆齿和偏心滚筒在安装时有一个偏心距离,在做回转运动时,两者的相对位置会随着转动情况变化,使得伸缩杆齿在入土时伸出滚筒的长度最长,而在相反的方向上,伸缩杆齿伸出的长度最短,从而实现了在伸出长度最长处捡膜,在伸出长度最短处脱膜,达到伸缩杆齿入土捡拾残膜,偏心滚筒脱膜的目的。对于杂质较多的田间地膜,可在杆齿滚筒前安装一个小弹齿辊,通过小弹齿辊将地膜从杂质中挑出,起到清杂捡拾的作用,提高了杆齿滚筒的捡净率。
2 杆齿滚筒的运动分析
2.1 杆齿滚筒模型
简化杆齿滚筒运动模型,其中A点为连杆与转轴盘铰接点,B点为连杆与滚筒法兰盘铰接点,O点为杆齿转轴中心,O1点为滚筒轴心,OA为转轴盘半径,O1B为滚筒法兰盘与连杆铰接点距偏心滚筒中心的距离,OO1为偏心滚筒与杆齿转轴的偏心距,AC为伸缩杆齿,E点为伸缩杆齿与偏心滚筒栅缝的交点,D点为O1B延伸与偏心滚筒外圆的交点。机构运动简图如图2所示。
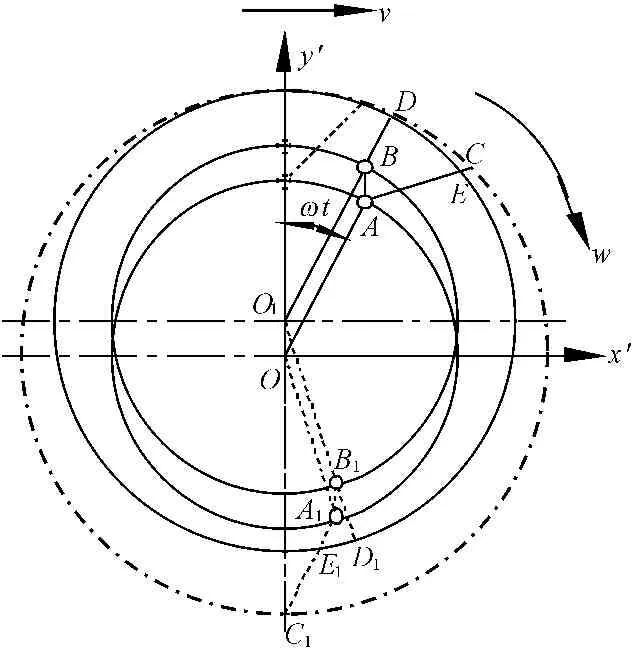
图2捡膜机构运动简图
Fig.2 The kinematic diagram of pickup film mechanism
2.2 杆齿滚筒运动方程
捡膜机构作业时,设杆齿转轴转动角速度为ω、机具前进作业速度为v,转轴盘半径OA为r,伸缩杆齿AC长度为L,伸缩杆齿的安装角即AC与OA的夹角为α,偏心距OO1为e,分析可知O1B的长度与OA长度相等,连杆AB长度即为偏心距e,伸缩杆齿末端距杆齿转轴中心距离为R,建立动坐标系x′oy′,伸缩杆齿末端C点相对动坐标系x′oy′的相对运动方程为
(1)
(2)
其中

(3)
C点绝对运动方程为
xC=vt+Rsinωt
(4)
yC=Rcosωt
(5)
O1D为偏心滚筒半径,设O1D为r1,则O1B延伸与偏心滚筒外圆的交点D相对运动方程为
(6)
(7)
D点绝对运动方程为
xD=vt+r1sinωt
(8)
yD=r1cosωt
(9)
分析可知,捡膜机构运动类似于平行四杆机构,可看作为短杆OO1作为机架、长杆OA作为曲柄的运动。伸缩杆齿末端与滚筒外圆的绝对运动轨迹为余摆线,轨迹环扣由弹齿末端运动线速度与机具前进速度比λ决定,当λ小于和等于1时没有环扣,当λ大于1时有环扣。
λ分别取1、1.2、1.5、2在ADAMS软件中进行运动仿真分析,得到伸缩杆齿末端C点轨迹曲线如图3所示。可以看出,当速度比λ的值越大,环扣越大,同一伸缩杆齿在相邻的两次挑膜点水平距离越小,漏检区域越小,在保证不漏捡的情况下,伸缩杆齿在圆周上的排列个数就越少,机构将会更加紧凑。

图3杆齿末端运动轨迹
Fig.3 The moving track of the rod-tooth end
2.3 伸缩杆齿在滚筒圆周上的排列
为了确保伸缩杆齿挑膜作业的连续性,两杆齿运动轨迹曲线重叠情况如图4所示。
相邻两伸缩杆齿末端的运动轨迹分别为曲线L1、L2,假设集条残膜厚度为H,其中重叠区域为A1,高度为h1;无伸缩杆齿挑膜轨迹的区域即挑膜盲区为A2,高度为h2。
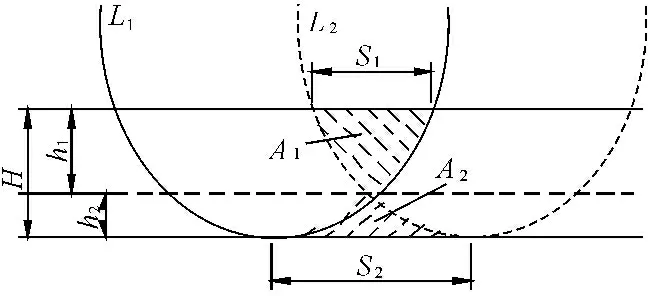
图4挑膜过程简图
Fig.4 Film picking process diagram
其中轨迹曲线L1的坐标为(xL1,yL1),轨迹坐标方程表达式为伸缩杆齿末端绝对运动方程
xL1=vt+Rsinωt
(10)
yL1=Rcosωt
(11)
轨迹曲线L2的坐标为(xL2,yL2)
xL2=vt+Rsin(ωt+θ)
(12)
yL2=Rcos(ωt+θ)
(13)
其中θ为两个相邻伸缩杆齿之间的安装夹角。
当yL1=yL2=ymin时,可计算出S2的长度
(14)
可以得出S2的长度由机具作业速度v、伸缩杆齿转动角速度ω、两个相邻伸缩杆齿之间的安装夹角θ决定。在重叠区域A1内,两个相邻伸缩杆齿可实现重复挑膜作业,水平方向重叠量S1越长,则伸缩杆齿重复挑膜的区域越大。在挑膜盲区A2内,两个相邻伸缩杆齿都无法实现挑膜作业,水平方向S2越短,挑膜盲区越小。重叠区域越大,挑膜盲区越小,则残膜捡净率越高。综合残膜捡净率和作业效率,主要由残膜碎片的最小尺寸δ决定S2的长度,即
S2≤δ
(15)
保证伸缩杆齿末端可以接触到挑膜盲区A2中的残膜,从而确定最佳的挑膜运动轨迹曲线。在只考虑捡净率的情况下,可以使伸缩杆齿在工作时深入土壤深度为h2,便可消除两个相邻伸缩杆齿的挑膜盲区。
本结构取滚筒圆周上均布排列8组伸缩杆齿,相邻伸缩杆齿之间的安装夹角θ为45°,当λ=2时,杆齿转轴轴心位于坐标原点,相邻两伸缩杆齿末端的运动轨迹如图5所示,地表位于纵坐标-540 mm处,当集条残膜铺设厚度为240 mm左右,从轨迹图中可以看出,相邻两伸缩杆齿末端轨迹相交点的纵坐标为-500 mm,其中h2为40 mm,S2为190 mm,挑膜盲区面积很小。
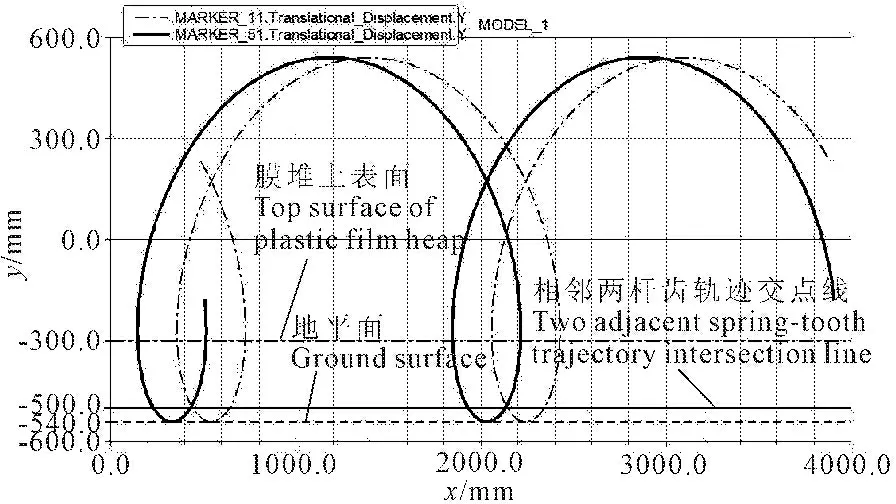
图5相邻两杆齿的运动轨迹
Fig.5 The motion track of two adjacent rod-tooth
减小挑膜盲区使漏捡区域变小的方法有两种,方法1:调节限深轮,使伸缩杆齿作业时入土深度40 mm以上,可消除挑膜盲区;方法2:提高弹齿末端运动线速度,即增大λ值,可减小挑膜盲区,但不能消除挑膜盲区。当机具前进作业速度保持恒定时,即作业效率不变的情况下,λ值越小,弹齿入土深度越大,土壤阻力越大,功率消耗也越大;λ值越大,弹齿入土深度越小,土壤阻力越小,功率消耗也越小;所以在综合考虑机具作业时的功率消耗和作业效率的情况下,结合方法1、2,既增加λ值,又使弹齿入土但深度较浅,保证作业效率不变的前提下,以较小的功率消耗来消除挑膜盲区。
当作业速度为1.7 m·s-1时,为消除挑膜盲区,不同λ速度比下杆齿轴转速和弹齿入土深度值见表1所示。
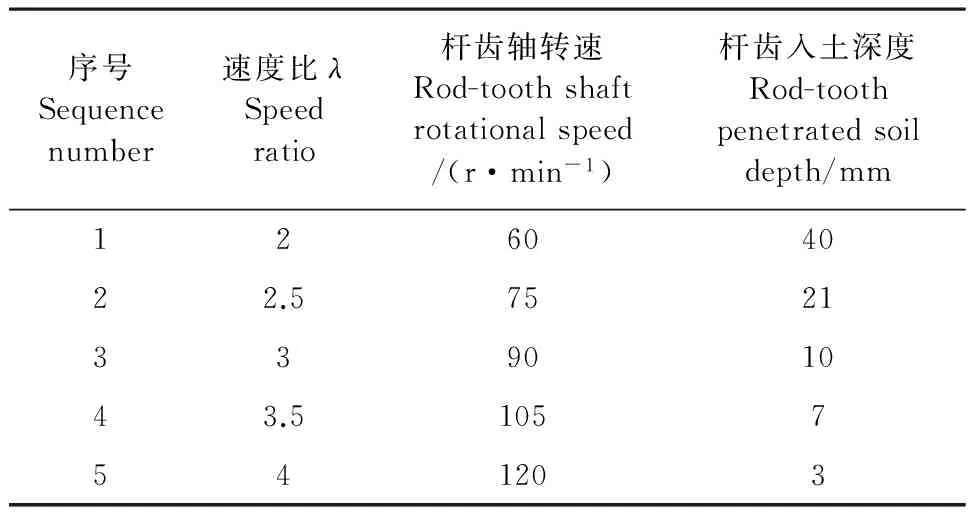
表1 不同速度比下杆齿入土深度
随着λ值的不断增大,为消除挑膜盲区,杆齿入土深度不断减小,相应的杆齿轴转速在不断增加,但是,由于滚筒半径较大,而且有偏心距的存在,所以杆齿轴转速也不宜太大,避免机构转动时产生较大的振动。
2.4 杆齿与滚筒的相对运动分析
伸缩杆齿和偏心滚筒在做回转运动时,伸缩杆齿相对于滚筒伸出的长度有规律的变化,在滚筒顶部的位置,伸缩杆齿缩回滚筒内部,在滚筒底部的位置,伸缩杆齿伸出滚筒的长度达到最长,实现了在底部伸缩杆齿挑膜、在顶部偏心滚筒脱膜的功能。如图6所示,在运动过程中,伸缩杆齿与偏心滚筒栅缝的交点E相对于伸缩杆齿的位置在不断变化,在完成一周回转运动时,伸缩杆齿相对于偏心滚筒会产生一个相对转动角度,所以在设计偏心滚筒时需要考虑滚筒栅缝的长度要与相对转动的角度相匹配,避免捡膜机构在做回转运动时,伸缩杆齿与偏心滚筒发生干涉现象。
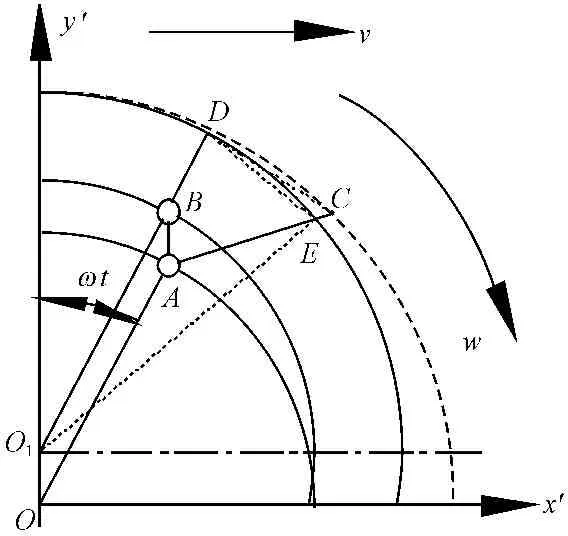
图6杆齿与滚筒的相对运动
Fig.6 Relative motion between rod-tooth and roller

(16)

(17)

(18)
其中O1E为偏心滚筒直径r1,CE为伸缩杆齿伸出偏心滚筒的长度,假设伸缩杆齿最长伸出距离为l,可知0≤CE≤l,便可求得DE长度值的范围及其对应圆心角φ的取值范围[φmin,φmax],从而得出两者相对运动产生的弧长I为
I=(φmax-φmin)·r
(19)
假设伸缩杆齿初始位置恰好处于滚筒正上方缩回处,即OA、OB与y轴重合,当机构回转一周,以OA相对于y轴夹角计算,伸缩杆齿相对于偏心滚筒的运动可分为两段行程:
第一段行程:0°~180°,伸缩杆齿伸出滚筒长度由最短运动到最长;
第二段行程:180°~360°,伸缩杆齿伸出滚筒长度由最长运动到最短。
因此,为了使两者运动时不产生干涉,设计时适当加大弧长长度,使两者之间在极限点存在一定的间隙,这样便可确定滚筒栅缝的最佳长度。
2.5 捡膜机构转动性能分析
伸缩杆齿总成与偏心滚筒总成通过连杆相连,运动模式类似于平行四杆机构,伸缩杆齿总成作为主动件,偏心滚筒作为从动件,偏心滚筒铰接点B运动情况如下图7所示。
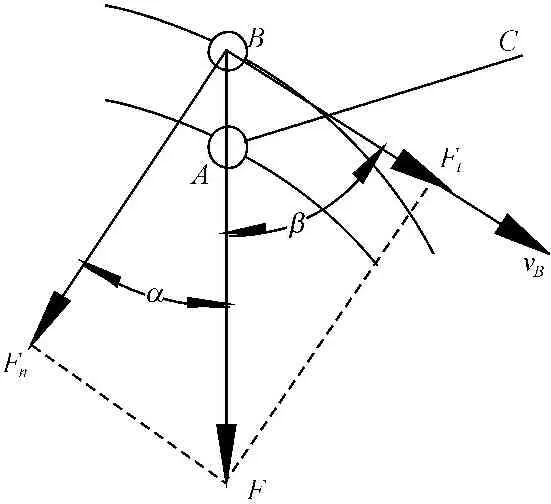
图7捡膜机构受力情况
Fig.7 The force stress condition of the pickup film mechanism
α为压力角,β为传动角,F为连杆AB对偏心滚筒铰接点B的作用力,切向分力Ft,法向分力Fn,点B的瞬时运动方向为切线方向,即图7中所示vB的方向。切向分力Ft=Fcosα为有效分力,可以看出,α+β=90°,压力角α越小,传动角β越大,对机构运动越有利;反之,压力角α越大,对机构运动越不利。当压力角α为90°时,驱动偏心滚筒的有效分力Ft为零,连杆对偏心滚筒所做有效功率为零。
分析捡膜机构可知,当点B位于运动轨迹的最高点和最低点时,瞬时速度方向为水平方向,压力角α为90°,处于“死点位置”,不利于机构的传动,此时只能通过机构的运动惯性冲过“死点位置”。为避免在“死点位置”出现机构卡死及运转不顺畅现象,采取两组连杆连接的方式,两连杆安装在相邻两伸缩杆齿处,一组连杆处于“死点位置”时,另一组连杆可以提供有效分力,避免机构在运动过程中卡死。
3 田间试验
3.1 试验条件
通过制作残膜捡拾打捆机试验样机,于2015年10月16日在新疆兵团五家渠共青团进行田间试验,作业地块为平作区秋后棉花收获后的棉田,所用残膜为厚度0.008 mm聚乙烯农用地膜。
棉田先进行前两道工序的作业:首先利用秸秆粉碎还田机在垂直于种行的方向开出集条膜道,集条膜道每隔100 m设置一个;然后利用立杆搂膜机将回收残膜堆积在集条膜道上。集条后残膜堆积情况如图8所示。
对集条残膜膜堆的厚度和宽度进行测量统计,如表2所示,膜堆平均宽度为116 cm,平均厚度为38 cm。
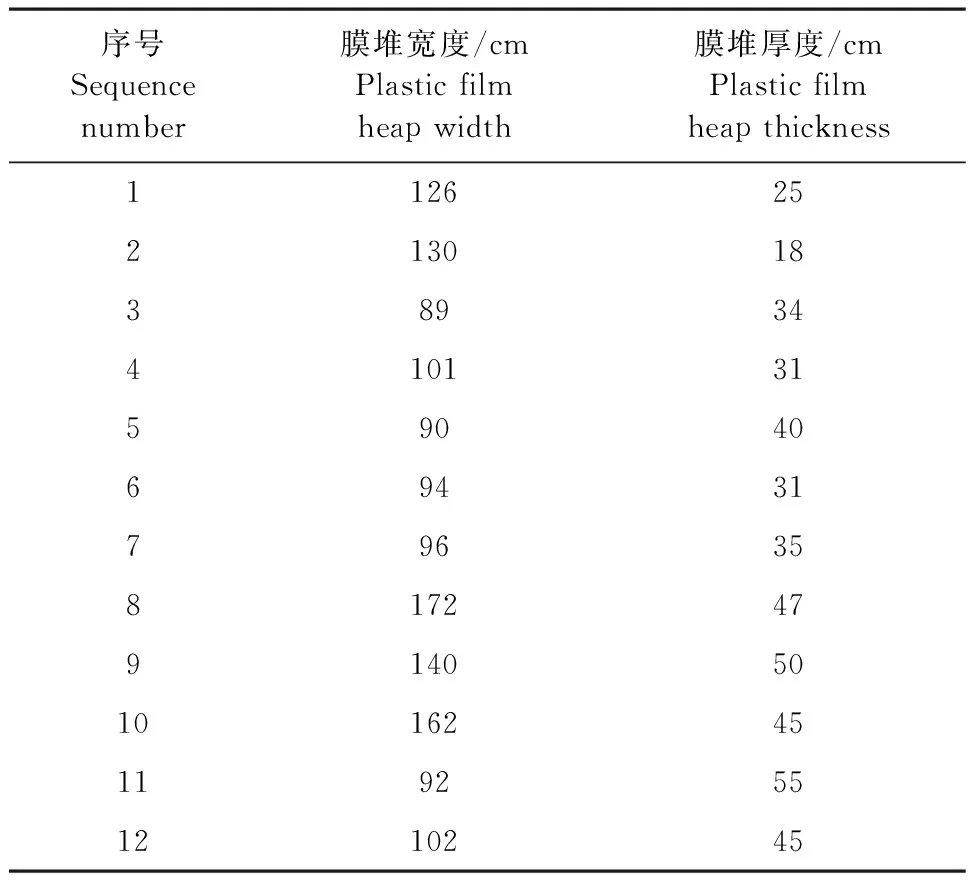
表2 集条残膜尺寸
3.2 试验方法
随机选取测试区,每一个测试区的作业面积相等,试验样机以速度比λ为2进行捡膜打捆作业。分别称量每个测试区的膜堆总重、回收后残膜毛重,并且对回收后的残膜和未收回残膜进行清洗称重,测得其净重。
其中,清杂率ε、膜堆重量m、残膜总质量mc、回收残膜毛重m1、回收残膜净重m2之间的关系为:
(20)
捡拾率n、回收残膜净重m2、未收回残膜净重ma之间的关系为:
(21)
其中一定面积内集条膜堆中残膜净重所占比重k为:
(22)
3.3 试验结果
先选取5个测试区,每个测试区的膜堆面积相等,分析膜堆中残膜与杂质的含量,测得捡拾作业前集条膜堆中残膜所占的比重,如表3所示,平均残膜所占比重为1.512%。
另选5个测试区测试集条残膜捡拾率和清杂率,试验结果如表4所示。试验证明,整机工作运转顺畅,捡膜机构工作稳定可靠,滚筒栅缝未出现残膜拥堵现象,图9为样机试验作业情况,捡膜效果如图10所示。
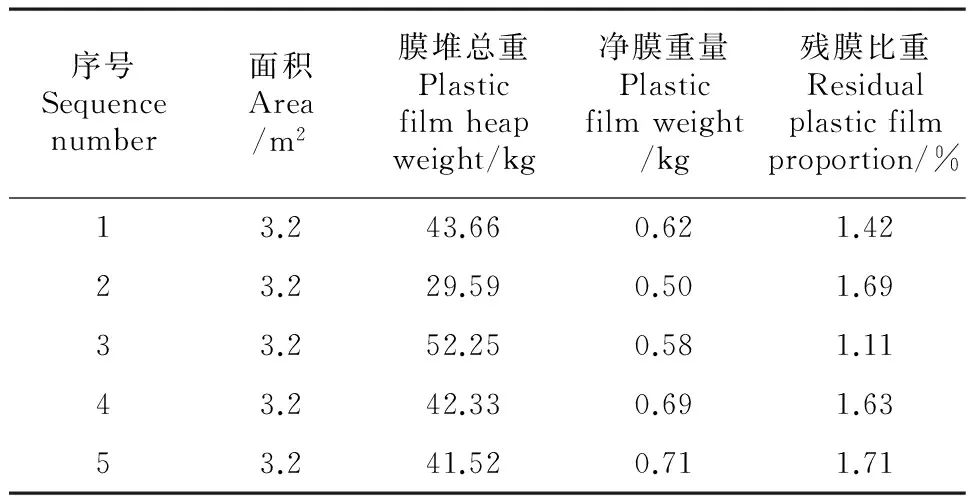
表3 残膜所占比重


图8 作业前集条残膜

图9 杆齿捡拾残膜作业痕迹
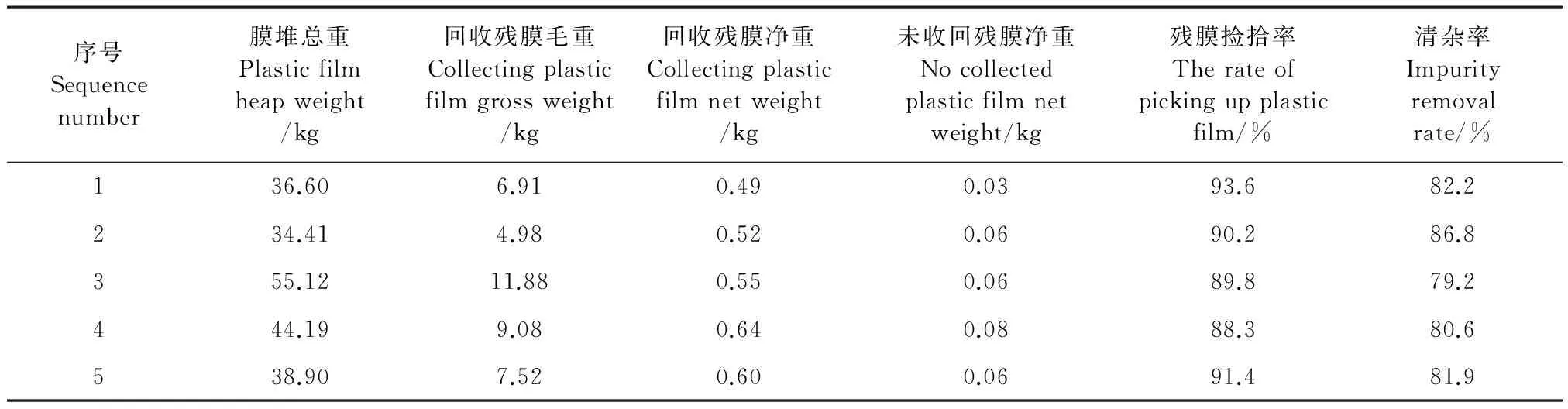
图10 捡拾后地表残膜残留情况
试验表明,捡膜效果和脱膜效果均达到了设计要求,平均捡拾率为90.66%,平均清杂率为82.14%,机具主要性能指标如表5所示。
在试验作业过程中发现,当集条残膜中棉杆、棉叶、碎土等杂质较多时,残膜和棉杆棉叶分离效果下降,残膜的压缩特性也随之改变,因此,后续工作需要提高残膜捡拾的清杂率,残膜含杂率对应的残膜压缩特性也有待于进一步研究。
4 结 论
1) 针对残膜回收新模式设计了一种集条残膜捡拾机构,分析表明杆齿末端轨迹主要由速度比λ决定,λ值越大,轨迹环扣就越大,漏检率就越小。
2) 分析了杆齿在圆周上的排列方式与捡膜性能之间的关系,以及为避免出现挑膜盲区的杆齿最小入土深度;通过分析得出,设置两组连杆机构使捡膜机构运动更为稳定可靠,有效避免了连杆运动产生“死点位置”。
3) 通过田间试验表明,伸缩杆齿的捡膜性能和偏心滚筒的脱膜性能良好,未出现滚筒栅缝残膜拥堵现象,伸缩杆齿实际运动情况与理论仿真结果一致,平均捡拾率为90.66%,平均清杂率为82.14%。
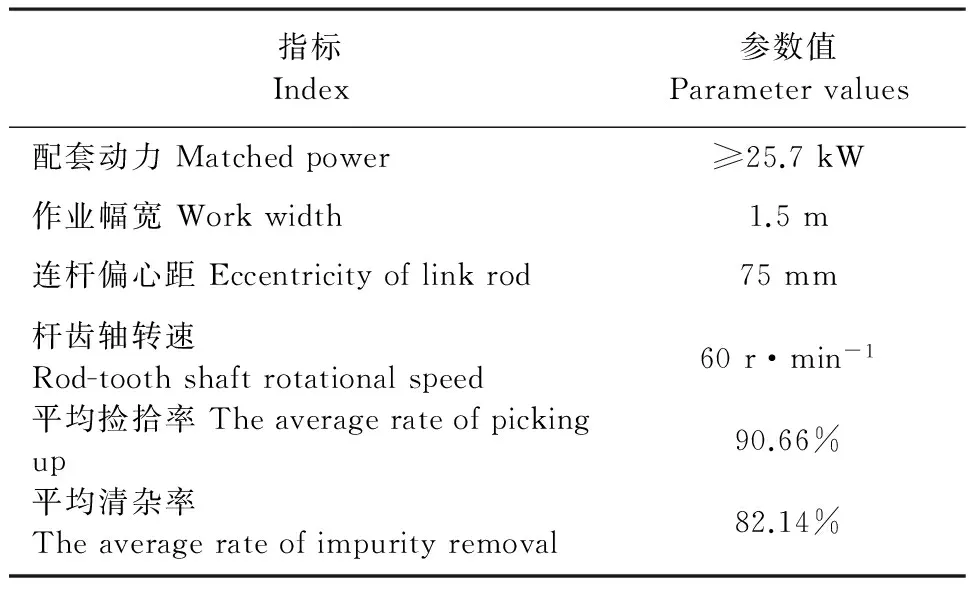
表5 残膜捡拾机构的主要性能指标
[1] 张东兴.农用残膜的回收问题[J].中国农业大学学报,1998,3(6):103-106.
[2] 何文清,严昌荣,赵彩霞,等.我国地膜应用污染现状及其防治途径研究[J].农业环境科学学报,2009,28(3):533-538.
[3] 王 频.残膜污染治理的对策和措施[J].农业工程学报,1998,14(3):185-188.
[4] 李亚丽,石林榕,孙 伟,等.一种新型残膜捡拾机的设计与试验[J].干旱地区农业研究,2015,33(5):253-257.
[5] 陈 发,史建新,王学农,等.弧型齿残膜捡拾滚筒捡膜的机理[J].农业机械学报,2006,37(6):36-41.
[6] 谢建华,侯书林,付 宇,等.残膜回收机弹齿式拾膜机构运动分析与试验[J].农业机械学报,2013,44(S1):94-99.
[7] 于振华,王浩宇,许光明,等.大垄双行膜下滴灌种植模式下的残膜回收[J].农业与技术,2012,(12):70-71.
[8] 那明君,董 欣,侯书林,等.残膜回收机主要工作部件的研究[J].农业工程学报,1999,15(2):112-115.
[9] 卢博友,杨 青,薛少平,等.圆弧形弹齿滚筒式残膜捡拾机构设计及捡膜性能分析[J].农业工程学报,2000,16(6):68-71.
[10] 侯书林,张淑敏,孔建铭,等.弹齿式收膜机主要结构设计[J].中国农业大学学报,2004,9(2):18-22.
[11] 张东兴.残膜回收机的设计[J].中国农业大学学报,1999,4(6):41-43.
[12] 卢博友,薛少平,薛惠岚,等.弹齿滚筒式残膜捡拾机构捡膜特性分析[J].西北农林科技大学学报(自然科学版),2000,28(5):100-104.
[13] 徐新惠,王维新,吴 杰,等.滚筒式残膜回收机的理论设计和试验研究[J].农机化研究,2006,(3):123-124.
[14] 徐良庆,肉孜·阿木提,李 莉,等.杆齿栅筒式捡拾装置[J].新疆农业大学学报,1998,21(2):163-167.
[16] 赵 岩,郑 炫,周敦兴.农田残膜捡拾打包联合作业机的研制[J].新疆农机化,2015,(1):6-7.
