高超声速飞行器的终端滑模姿态控制
2018-01-29戈新生
管 萍,蒋 恒,戈新生
高超声速飞行器的终端滑模姿态控制
管 萍,蒋 恒,戈新生
(北京信息科技大学,北京,100192)
针对具有高度非线性、强耦合、含较大不确定性特点的高超声速飞行器,设计了终端滑模控制器,并应用于高超声速飞行器的姿态控制中。对飞行器姿态控制系统的慢回路设计PID控制律,快回路设计终端滑模控制律。终端滑模控制对系统参数的变化不灵敏,具有良好的鲁棒性。并利用李雅普诺夫稳定性理论证明整个闭环系统的稳定性。仿真结果表明,在气动参数大范围摄动的情况下,该控制系统对于高超声速飞行器姿态角信号指令具有良好的跟踪性能。
高超声速飞行器;气动参数;不确定性;终端滑模控制;姿态控制
0 引 言
高超声速飞行器是指以大于马赫数5的速度飞行的飞行器。由于其在军事和民事应用方面前景广阔,所以高超声速飞行器已经成为世界各国研究的热点。自20世纪90年代以来,美国、俄罗斯、德国、日本等国家在高超声速飞行器的各项技术上不断取得突破与进展,中国也在积极实施高超声速飞行器科技专项工程。与一般的飞行器相比,高超声速飞行器的参数变化快、不确定性高、通道耦合强,传统的控制方法已经难以满足其姿态控制系统的需求,甚至会导致飞行任务的失败[1,2]。作为美国空军重点发展的高超声速技术验证飞行器,HTV-2的两次飞行试验均未成功,都是因为对高超声速空气动力学认识不够[3]。因此,有必要加强对高超声速空气动力学技术的研究。
目前,高超声速飞行器在飞行控制方面已经取得了一系列的研究成果。文献[4]通过设计三阶拟连续滑模控制器,并引入虚拟控制,确保系统在有限时间内实现对制导指令的稳定跟踪。文献[5]提出一种鲁棒动态逆设计方法,改善了传统动态逆在鲁棒性能方面的不足,达到对高超声速飞行器的姿态控制。文献[6]将神经网络与自适应控制相结合,通过网络权值的在线学习,从而有效控制存在时变干扰的非线性系统。文献[7]针对控制器鲁棒性不足的问题,通过增量动态逆、非光滑控制、干扰观测器进行改善,针对控制律所需的状态速率无法测量,通过引入线性-微分器解决了这个问题。文献[8]考虑了参数不确定及外部扰动,通过对模型的简化并将其线性化解耦,设计了滑模鲁棒控制器,从而达到对姿态角指令的跟踪。以上方法对高超声速飞行器的姿态有较好的控制效果,然而有些算法未考虑气动参数的变化,有些算法简化了系统模型,同时算法的复杂性使得在实际中应用较为困难。
本文针对高超声速飞行器的姿态控制,考虑气动参数变化,设计了终端滑模控制器。根据奇异摄动理论,将姿态控制系统分为快、慢两个回路进行设计,针对运动学方程和动力学方程分别设计PID控制器和终端滑模控制器,并对系统的稳定性进行了数学证明。最后对所设计的控制系统进行MATLAB仿真,在气动参数摄动的情况下,仿真结果证明所提出的控制方法有效。
1 高超声速飞行器姿态运动模型
考虑高超声速飞行器的十二状态六自由度动态模型[9,10]:





根据式(1)至式(6),可得高超声速飞行器姿态控制的仿射非线性模型:





其中,



2 姿态控制器设计
考虑气动参数的不确定性,设计终端滑模控制器,高超声速飞行器的姿态控制器结构如图1所示。该控制系统分为两个回路:针对外回路设计PID控制器;内回路设计终端滑模控制器。
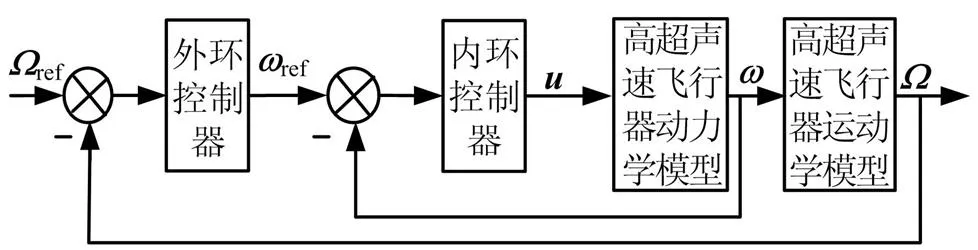
图1 控制器结构
2.1 慢回路控制器设计
2.2 快回路控制器设计

对式(21)关于时间求导,可得:

基于式(21)所示的滑模面,设计如下连续的终端滑模控制器:

为了证明系统的稳定性,构造Lyapunov函数为
3 仿真研究

控制器的参数选取如下:
在不考虑气动参数变化时,采用终端滑模控制器的姿态角响应曲线如图2所示,舵偏角响应曲线如图3所示。
从图2、图3可以看出,攻角的超调量小,侧滑角、滚转角的响应时间短,3个姿态角均能较好地跟踪期望指令。
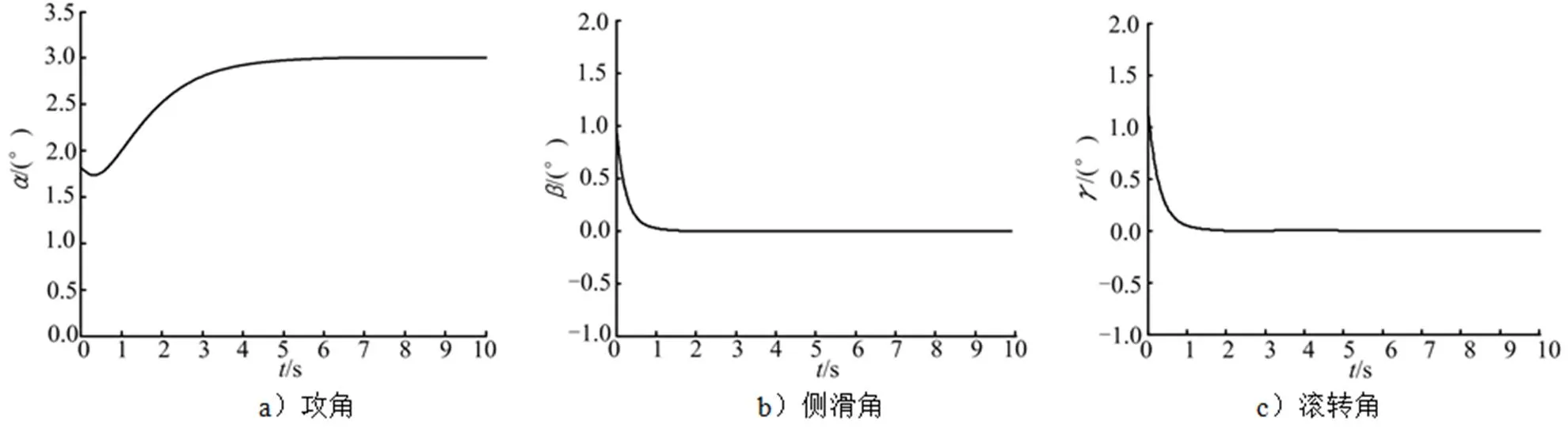
图2 标称气动参数下姿态角响应曲线

图3 标称气动参数下舵偏角响应曲线

从图4、图5可以看出,攻角的超调量仍然较小,侧滑角、滚转角的响应时间较短。
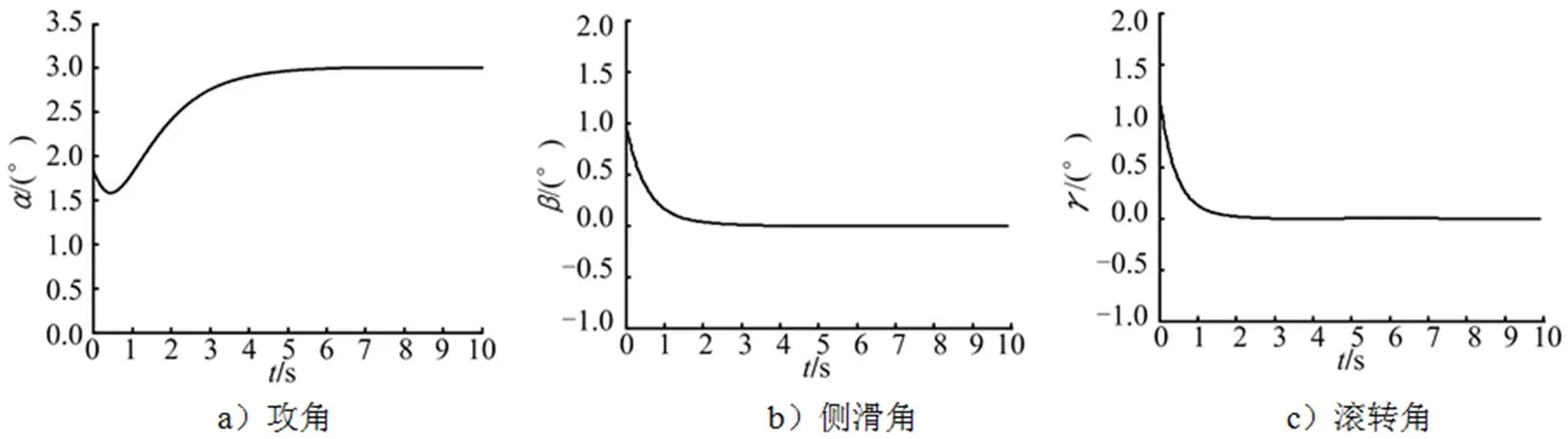
图4 气动参数增加30%时的姿态角响应曲线
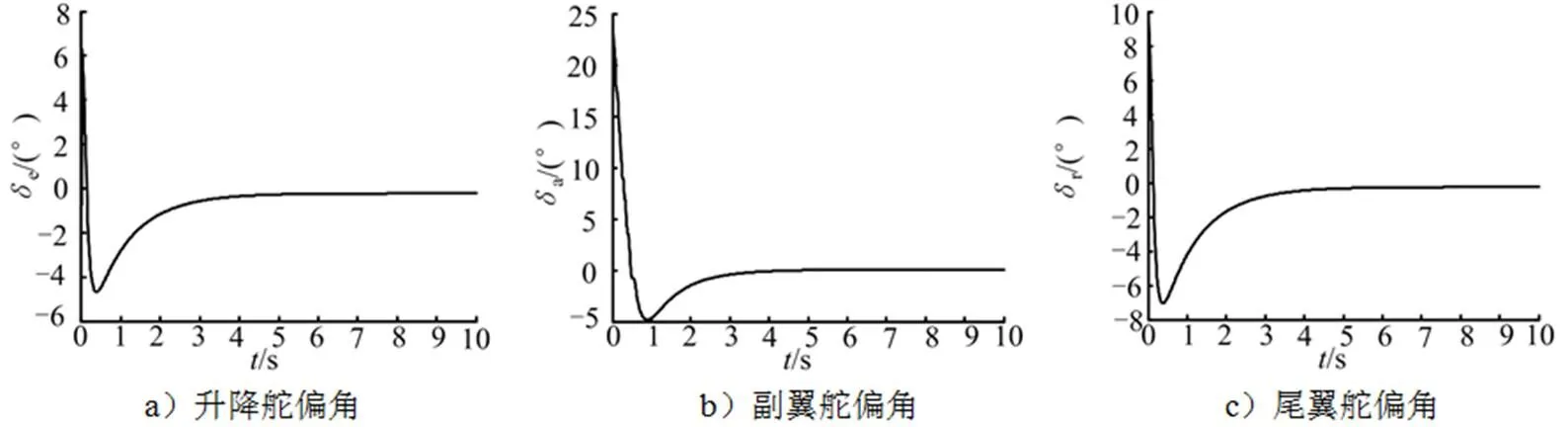
图5 气动参数增加30%时的舵偏角响应曲线
从图6、图7可以看出,攻角的超调量与标称情况下相比变化不大,侧滑角、滚转角能快速响应指令信号。
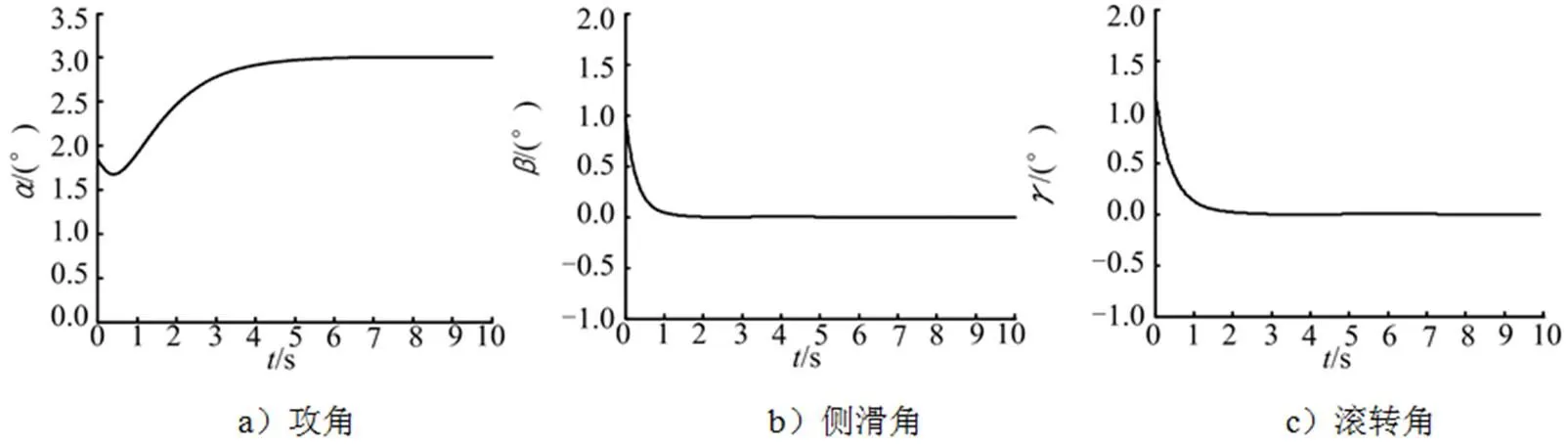
图6 气动参数减少30%时的姿态角响应曲线
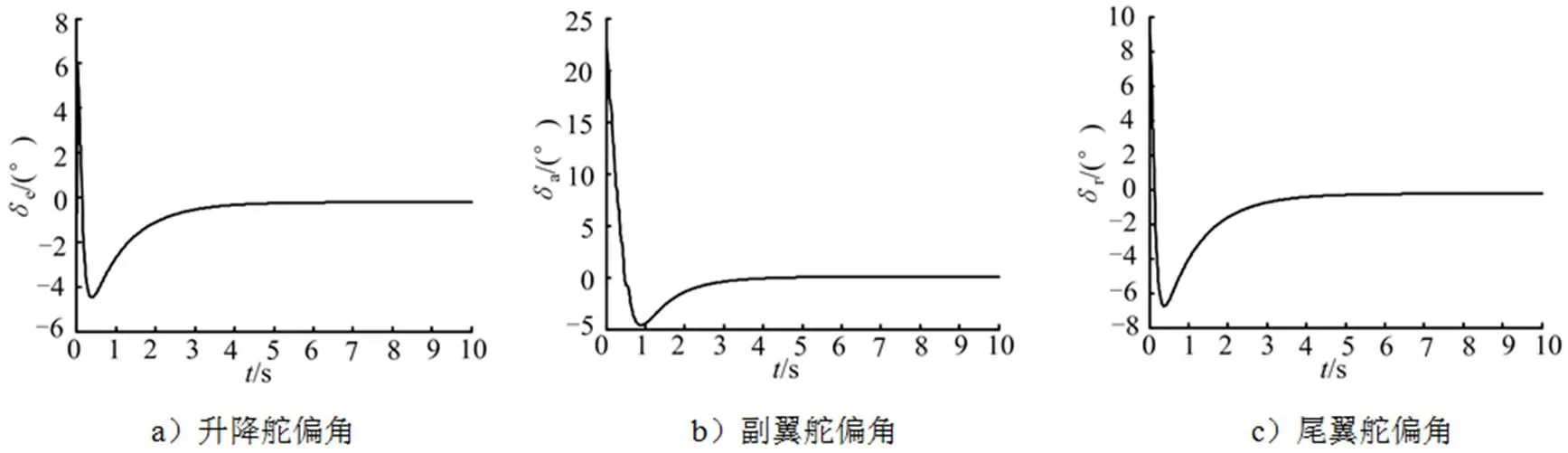
图7 气动参数减少30%时的舵偏角响应曲线
从仿真结果可以看出,在标称气动参数和气动参数变化的情况下,攻角的超调量都较小,侧滑角、滚转角的调节时间也较短,姿态角仍能较好的跟踪指令信号,显示出该终端滑模控制系统具有较强的鲁棒性。
4 结 论
本文将终端滑模控制应用于高超声速飞行器的姿态控制中,考虑气动参数的不确定性,设计了终端滑模控制器。由于终端滑模对系统参数变化不敏感,在标称气动参数和气动参数变化的情况下,3个姿态角都能较好的跟踪指令信号,显示出高超声速飞行器终端滑模控制系统具有较好的控制品质和较强的鲁棒性,在高超声速飞行器控制领域拥有广阔的应用前景。
[1] 黄琳, 段志生, 杨剑影. 近空间高超声速飞行器对控制科学的挑战[J]. 控制理论与应用, 2011, 28(10): 1496-1505.
[2] 孙长银, 穆朝絮, 余瑶. 近空间高超声速飞行器控制的几个科学问题研究[J]. 自动化学报, 2013, 39(11): 1901-1913.
[3] 甄华萍, 蒋崇文. 高超声速技术验证飞行器HTV-2综述[J]. 飞航导弹, 2013(6): 7-13.
[4] 王婕, 宗群, 田栢苓. 基于拟连续高阶滑模的高超声速飞行器再入姿态控制[J]. 控制理论与应用, 2014, 31(9): 1166-1173.
[5] 刘晓东, 黄万伟, 禹春梅. 基于鲁棒动态逆的高超声速滑翔飞行器动态面姿态控制[J]. 航天控制, 2015, 33(1): 22-27.
[6] Chemachema M. Output feedback direct adaptive neural network control for uncertain SISO nonlinear systems using a fuzzy estimator of the control error [J]. Neural Networks, 2012, 36(1): 25-34
[7] 张军, 丁世宏, 陆佳辉. 基于增量动态逆的高超声速飞行器控制律设计[J]. 电光与控制, 2013, 20(11): 16-20.
[8] 王亮, 刘向东, 盛永智. 基于扰动观测器的指数时变滑模再入姿态控制[J]. 中国空间科学技术, 2013(4): 31-39.
[9] 李惠峰. 高超声速飞行器制导与控制技术[M]. 北京: 中国宇航出版社, 2012.
[10] Keshmiri S, Colgren R, Mirmirani M. Six DoF nonlinear equations of motion for a generic hypersonic vehicle[C]. Hilton Head, South Carolina:AIAA Atmospheric Flight Mechanics Conference and Exhibit, 2007.
[11] Keshmiri S, Colgren R, Mirmirani M. Development of an aerodynamic database for a generic hypersonic air vehicle[C]. San Francisco, California: AIAA Guidance, Navigation, and Control Conference and Exhibit, 2005.
[12] Shtessel Y, Hall C, Jackson M. Reusable launch vehicle control in multiple-time-scale sliding modes[J]. Journal of Guidance Control Dynamics, 2012, 23(6): 1013-1020.
[13] 张强, 于宏亮, 许德智. 基于自组织小波小脑模型关节控制器的不确定非线性系统鲁棒自适应终端滑模控制[J]. 控制理论与应用, 2016(3): 387-397.
Terminal Sliding Mode Attitude Control for Hypersonic Vehicles
Guan Ping, Jiang Heng, Ge Xin-sheng
(Beijing University of Information Science and Technology, Beijing, 100192)
A terminal sliding mode controller is applied to the attitude control of hypersonic vehicle, which has the characteristics of high nonlinearity, strong coupling and greater uncertainty. The PID control law is designed for the slow loop of the aircraft attitude control system, and the terminal sliding mode control law is designed for the fast loop. The terminal sliding mode control is not sensitive to the parameters of the system, and has good robustness. And the stability of the closed-loop is proved by the Lyapunov theory. The simulation results show that this control system has the good tracking performance for the desired attitude angle of hypersonic vehicles, in the case of a wide range of aerodynamic parameters perturbation.
Hypersonic vehicle; Aerodynamic parameter; Uncertainties; Terminal sliding mode control; Attitude control
1004-7182(2017)06-0060-05
10.7654/j.issn.1004-7182.20170614
V249.122+.2
A
2017-01-04;
2017-01-19
国家自然科学基金(11472058)
管萍(1968-),女,博士,副教授,主要研究方向为智能非线性控制及其应用