利用Tracker软件验证机械能守恒定律*
2018-01-26吴宏伟王太军
郎 和 吴宏伟 王太军
(西北师范大学教育学院 甘肃 兰州 730070)
1 引言
现行高中物理教材对于“验证机械能守恒定律”大多数版本利用自由落体运动实验,该实验过程只有重力势能和动能的相互转化,没有弹性势能、重力势能与动能的相互转化.而高中物理教材中机械能守恒定律的内容是:在只有重力或弹力做功的物体系统内,动能与势能可以相互转化,而总的机械能保持不变.
Tracker软件能够自动追踪研究对象的运动过程,采集所要测量的物理量,同步描绘所测物理量随时间变化的图像.本文将Tracker软件与单摆、弹簧振子和自由落体运动的实验相结合验证只有重力做功以及重力和弹力同时做功的条件下机械能守恒.
2 利用Tracker软件验证机械能守恒定律
2.1 用单摆验证机械能守恒定律

图1 用单摆验证机械能守恒定律实验装置
2.1.1 用数码相机拍摄摆球运动的视频
实验用到的器材主要有铁架台、细线、摆球、数码相机、游标卡尺及刻度尺等.实验装置如图1所示.用手拉动摆球(摆角小于5°)使摆球在竖直平面内摆动,同时用数码相机拍摄摆球运动的过程.
2.1.2 利用Tracker软件分析摆球运动的视频
打开Tracker软件,选择主菜单的“视频-导入”按钮,将视频加载,通过“视频剪辑设定”将摆球位于竖直位置最高处设定为研究视频的起始帧,并按下列步骤进行分析.
(1)设定参考坐标.选择“轨迹-坐标轴”,建立直角坐标系,如图2所示.
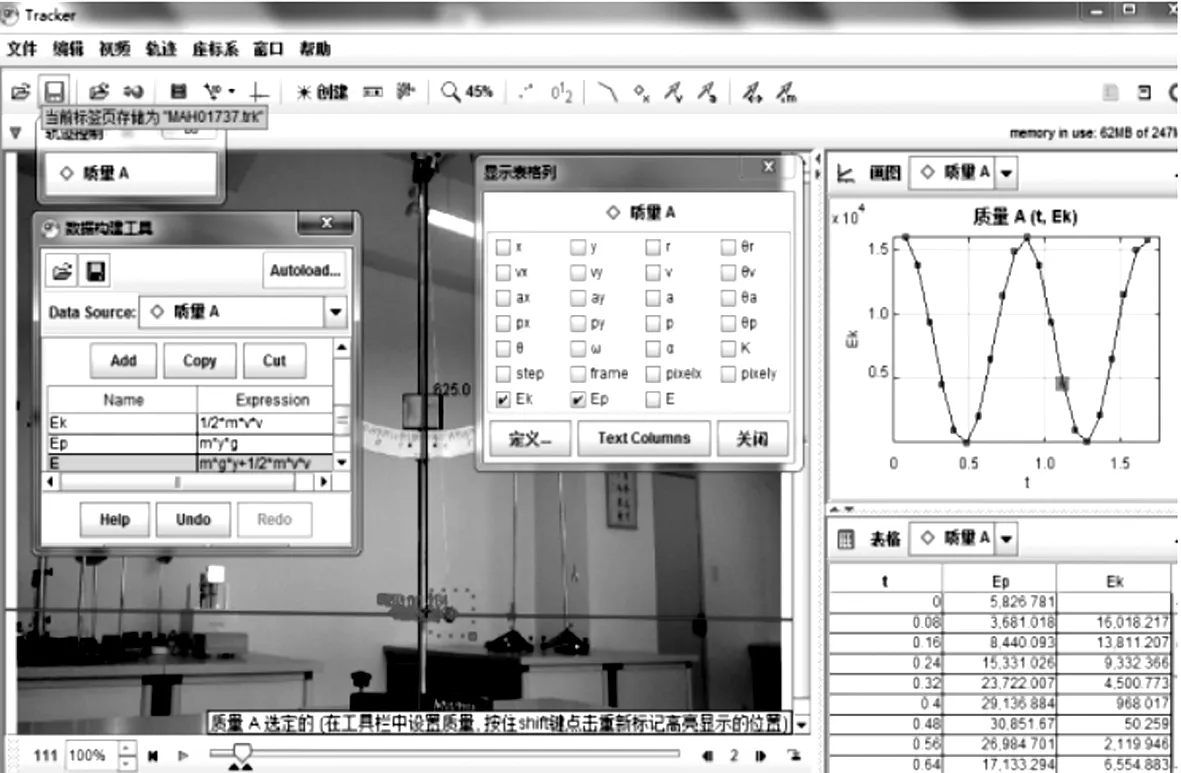
图2 视频分析界面
(2)进行参考尺寸的定标.选择的定标工具对长度定标,以场景中预先测量好的长度作为参考尺寸进行定标,从而使Tracker软件能够还原研究对象的实际运动过程.
(3)选择研究对象.本实验的研究对象是摆球,选择“轨迹-新建-质点”按钮,创建质点“Mass A”表示摆球.
(4)进行轨迹控制.按住Shift + Ctrl出现1个圆圈,通过这个圆圈标示出本实验选择的研究对象——摆球,在后面的视频中Tracker软件可以自动追踪摆球的运动过程.
(6)显示图像,依据获取的重力势能(Ep)、动能(Ek)和时间坐标,Tracker软件描绘出系统重力势能-时间、动能-时间图像,分别如图3和图4所示.
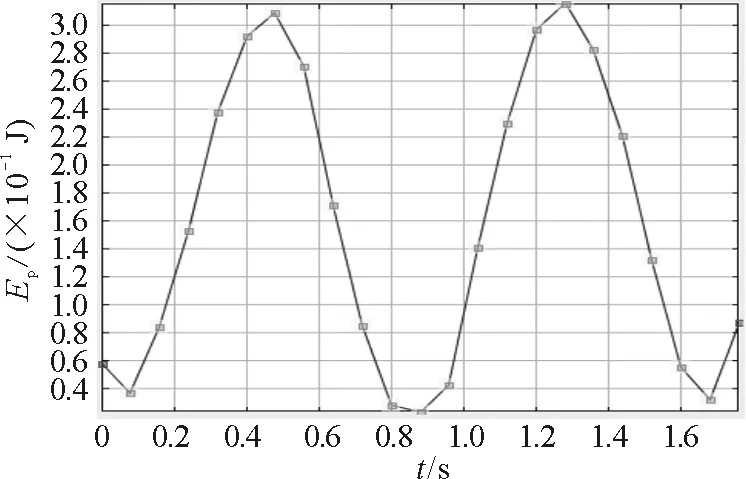
图3 摆球运动过程的Ep-t图像
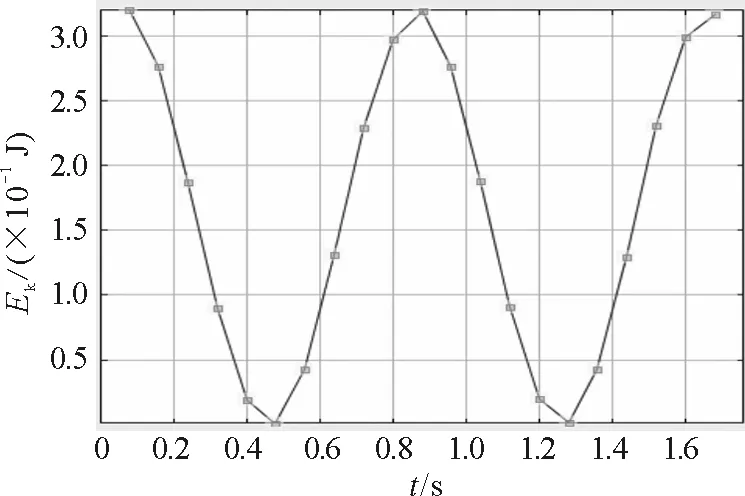
图4 摆球运动过程的Ek-t图像
2.1.3 数据处理及结论
利用摆球初始状态的机械能E=0.338 6 J与摆球运动过程中的机械能比较,结果如表1所示.
表1用单摆验证机械能守恒定律实验数据及处理
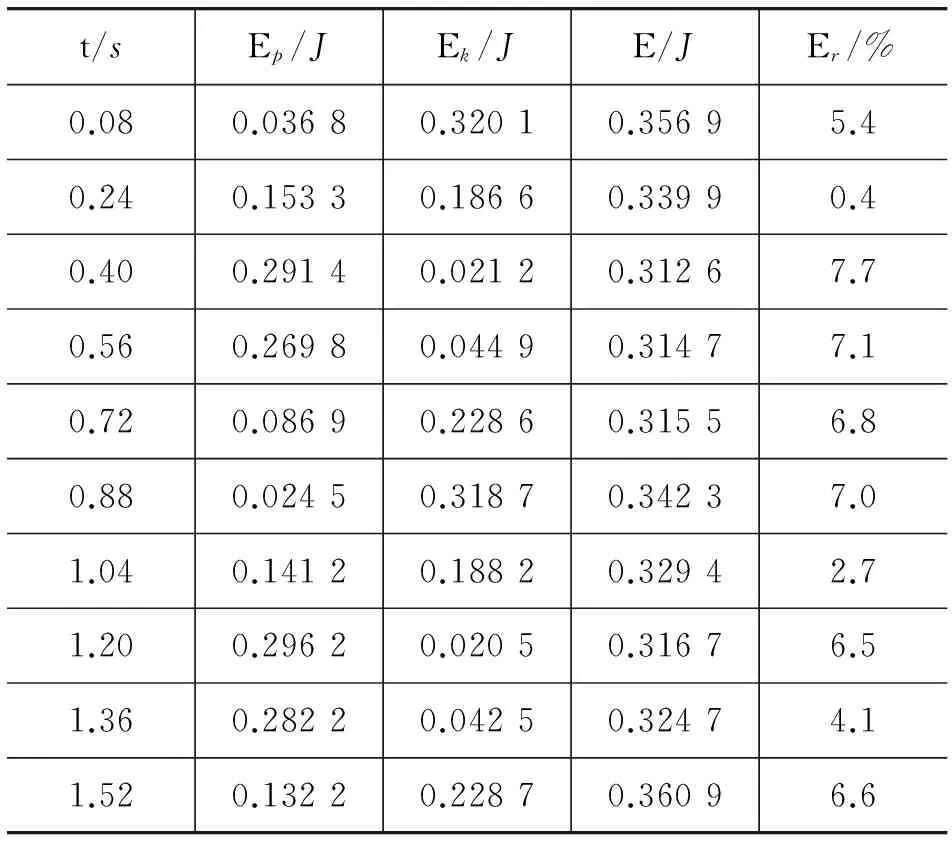
t/sEp/JEk/JE/JEr/%0.080.03680.32010.35695.40.240.15330.18660.33990.40.400.29140.02120.31267.70.560.26980.04490.31477.10.720.08690.22860.31556.80.880.02450.31870.34237.01.040.14120.18820.32942.71.200.29620.02050.31676.51.360.28220.04250.32474.11.520.13220.22870.36096.6
由表1得到,在误差允许的范围内,摆球在运动过程中重力势能和动能相互转化,但机械能的总值保持不变.验证了在只有重力做功的情况下,物体的机械能保持不变.造成误差的主要原因是摆球在运动过程中受到的空气阻力.
2.2 用弹簧振子验证机械能守恒定律
2.2.1 用数码相机拍摄弹簧振子运动的视频

图5 用弹簧振子验证机械能守恒定律实验装置
实验用到的器材主要有铁架台、电子天平、小球、数码相机、弹簧及刻度尺等.实验装置如图5所示.弹簧处于自由状态放开小球同时用数码相机拍摄小球运动的过程.
2.2.2 利用Tracker软件分析弹簧振子运动视频
利用2.1中的方法分析弹簧振子运动的视频,依据采集的重力势能、动能、弹性势能(Ef)和时间坐标,Tracker软件描绘出弹簧振子重力势能、动能和弹性势能随时间变化的图像,分别如图6~8所示.
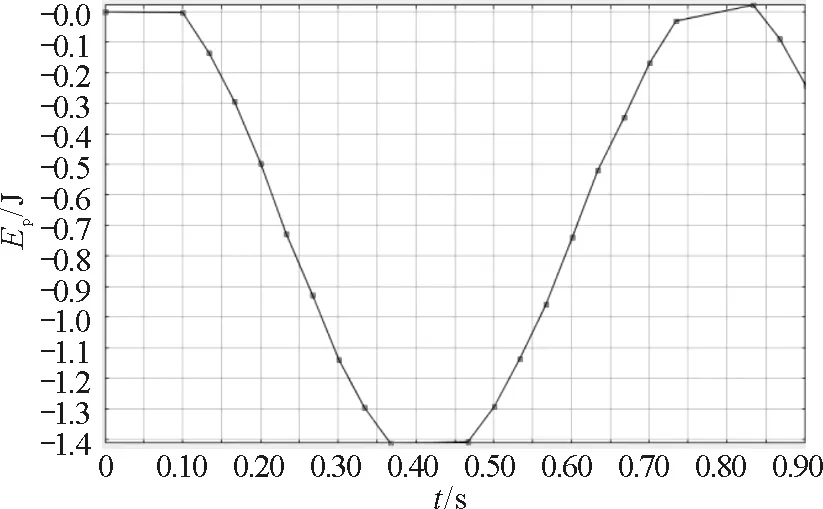
图6 弹簧振子运动过程的Ep-t图像
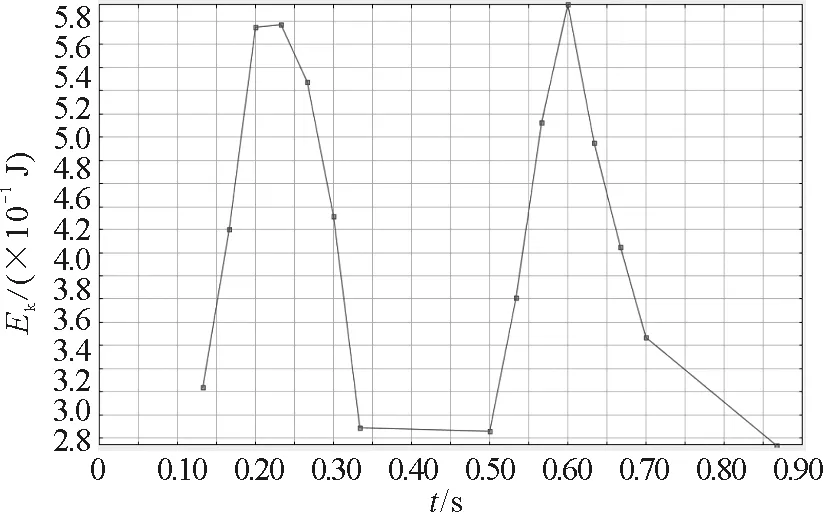
图7 弹簧振子运动过程的Ek-t图像

图8 弹簧振子运动过程的Ef-t图像
2.2.3 数据处理及结论
利用弹簧振子初始状态的机械能E=0.158 0 J与弹簧振子运动过程中的机械能比较,结果如表2所示.
表2用弹簧振子验证机械能守恒定律实验数据及处理
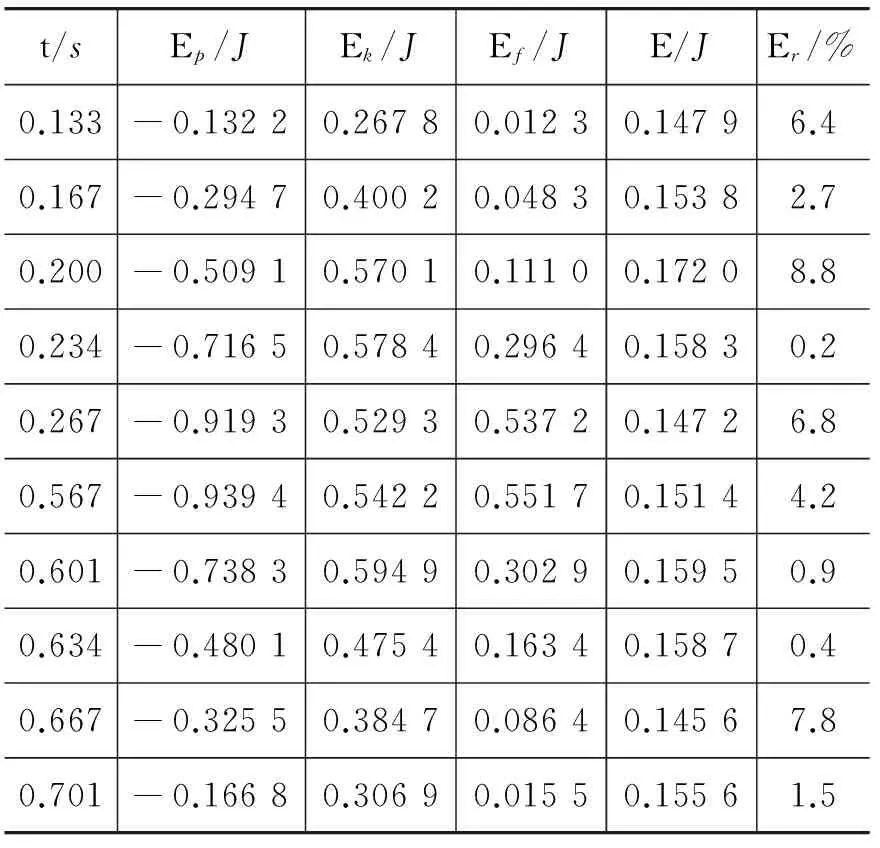
t/sEp/JEk/JEf/JE/JEr/%0.133-0.13220.26780.01230.14796.40.167-0.29470.40020.04830.15382.70.200-0.50910.57010.11100.17208.80.234-0.71650.57840.29640.15830.20.267-0.91930.52930.53720.14726.80.567-0.93940.54220.55170.15144.20.601-0.73830.59490.30290.15950.90.634-0.48010.47540.16340.15870.40.667-0.32550.38470.08640.14567.80.701-0.16680.30690.01550.15561.5
由表2得到,在误差允许的范围内,弹簧振子在运动过程中势能和动能相互转化,但机械能的总值保持不变.验证了在重力和弹力同时做功的情况下,系统的机械能保持不变.造成误差的主要原因是弹簧振子在运动过程中受到的空气阻力.
2.3 用自由落体运动验证机械能守恒定律
利用2.1中的方法分析自由下落小球运动的视频,依据采集的重力势能、动能和时间坐标,Tracker软件描绘出小球重力势能、动能随时间变化的图像,分别如图9和图10所示.
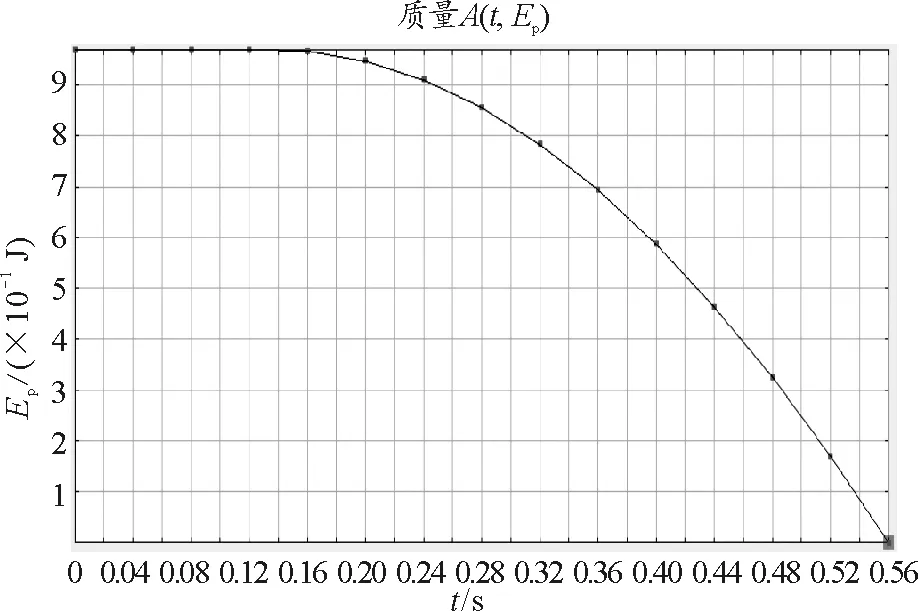
图10 小球运动过程的Ep-t图像
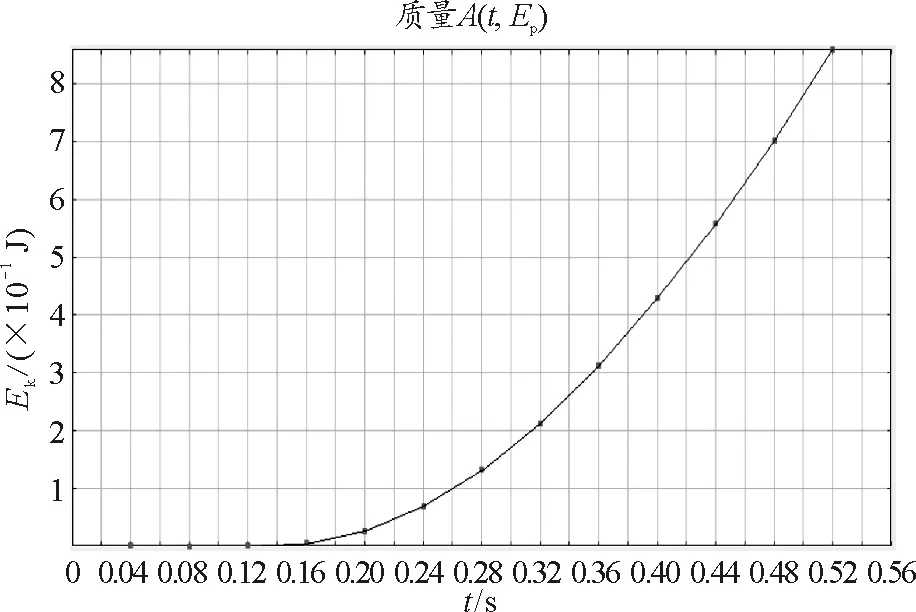
图11 小球运动过程的Ek-t图像
2.3.1 数据处理及结论
利用小球初始状态的机械能E=1.023 7 J与小球在自由下落过程中的机械能比较,结果如表3所示.
表3用自由落体运动验证机械能守恒定律实验数据及处理
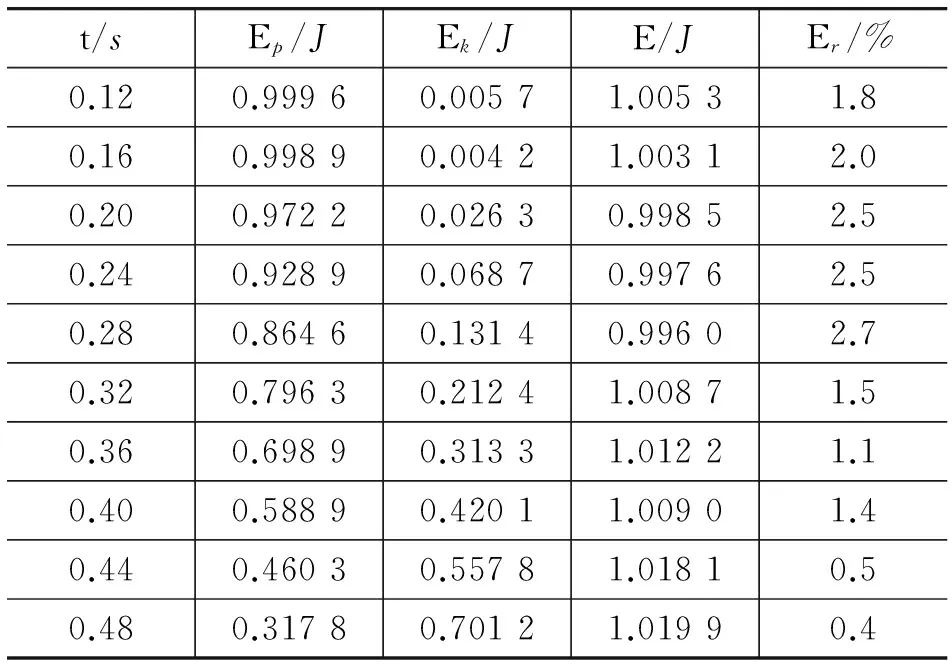
t/sEp/JEk/JE/JEr/%0.120.99960.00571.00531.80.160.99890.00421.00312.00.200.97220.02630.99852.50.240.92890.06870.99762.50.280.86460.13140.99602.70.320.79630.21241.00871.50.360.69890.31331.01221.10.400.58890.42011.00901.40.440.46030.55781.01810.50.480.31780.70121.01990.4
由表3得到,在误差允许的范围内,小球在自由下落过程中重力势能和动能相互转化,但机械能的总值保持不变.验证了只在重力做功的情况下,系统的机械能保持不变.
3 结束语
实验表明,Tracker软件与单摆、弹簧振子和自由落体运动的实验相结合,不仅验证了只有重力做功条件下机械能守恒,而且验证了重力和弹力同时做功条件下机械能守恒.
Tracker软件在高中物理实验中的应用,有利于教师进行课堂实验教学和学生课外自主科学探究,是计算机软件与高中物理实验相结合的有效途径之一.
1 吴志山.让真实定量、定格——Tracker软件在物理学中的应用.物理教师,2012,33(7):52~54
