基于移动机器人的变电站仪表自动识别研究
2018-01-25高旭王育路曾健
高旭,王育路,曾健
(1.国网陕西省电力公司榆林供电公司,陕西榆林 719000;2.国网陕西省电力公司经济技术研究院,陕西西安 710075;3.国网陕西省电力公司,陕西西安 710048)
随着科技进步和电力体制改革的不断深入发展,电力系统自动化程度已有很大提高,变电站值班也逐渐趋于无人化或少人化。为了保证变电站设备的安全可靠运行,更快地推进变电站无人值守的进程,利用智能移动机器人完成电站设备的巡检,就目前的技术而言,可以说是提高工作效率和质量、减员增效的理想方案之一[1]。因此研制开发变电站设备巡检机器人有重要的意义,其中利用移动机器人定位仪表的位置是一项研究热点。
由于目前智能变电站中尚存的仪表大多数都是指针式仪表,该类型的指针式仪表不具有数据接口,无法实现测量参数的自动化采集与传输,另外对于此类数据的记录主要依靠人工,受到人的主观因素和客观因素的影响。使用巡检机器人代替巡检人员对电力设备进行巡检,可以提高变电站的巡检质量和效率。巡检机器人在巡检时由于机械间隙和停车精度等因素,基本很难保证对待检测设备的拍摄位置完全保持一致,对同样的设备在不同的拍摄位置拍摄时,会有小幅位移和一定的旋转,如果不能准确定位变电站重要电气设备的位置,势必会导致巡检过程汇总产生大量冗余信息,干扰巡检系统的智能报警判断,同时使系统的稳定性与时效性下降[2]。
在仪表的智能化识别过程中,如何精确地定位仪表在图像中的位置是一项重要的内容。通过对Hough变换[3-4]进行改进之后提取圆形特征进行检测。BP神经网络的构建原理简单,训练迭代过程时间复杂度不高,有利于实现快速的智能识别[5-8]。研究者对变电站仪表识别方面的探索与应用在某些情况下已达到较好的效果,但面对复杂变电站场景下仪表识别的鲁棒性,目前还很难有一种方法能够较好地解决问题。
稀疏表示理论是近年来研究与应用的热点领域。它与传统的奈奎斯特采样定理不同,通过训练一个过完备且与变换基不相关的字典,将高维信号映射到低维空间上,在求得映射的最优化稀疏向量后,可从少量的信号重构出原信号。稀疏表示具有特征保持性、稀疏性等特点,目标信号可以通过该理论采集的少量信号值实现精确重建。
将稀疏表示理论引入到智能变电站移动机器人的仪表识别中,对复杂场景下该理论的应用进行适应性研究。图1为本文的自动识别变电站仪表的技术路线。首先选用方向梯度直方图特征对图像中的目标进行特征提取。另一方面,采集代表性样本进行基于稀疏表示方法的过完备字典训练,训练得到的字典具有非负性。最后通过待测目标在字典中稀疏度和重构残差判定目标类别。实验结果表明,本文提出的方法在复杂的变电站场景中有较好的识别率和实时性。
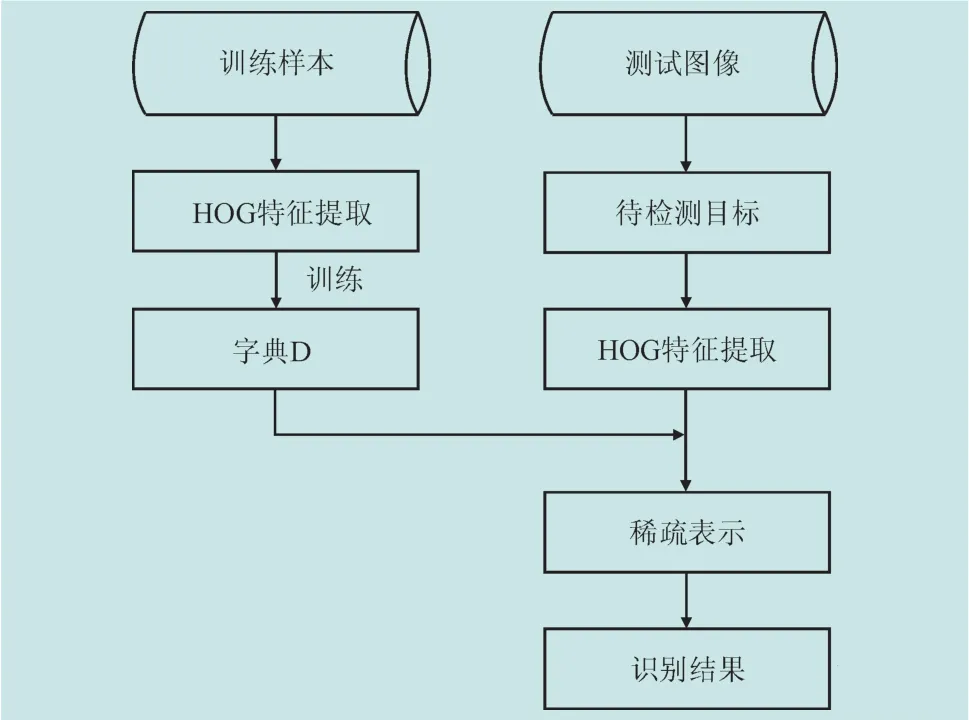
图1 基于HOG特征和稀疏表示的变电站仪表识别框架Fig.1 Substation meter identification framework based on HOG features and sparse representation
1 研究方法
1.1 仪表的HOG特征提取
变电站仪表在图像上的形态特征具有一定的规律,其外形一般为圆型或者由于成像角度的原因导致变形呈椭圆形。然而实际的拍摄条件下不同的拍摄姿态,光照条件可能不一致,因此在基于图像信息提取仪表特征时,要求特征向量对光照等条件具有不敏感性。
Dalal于2005年提出的HOG特征[9]是一种能有效地描述图像中对象边缘信息的描述符,用于描述图像局部区域的梯度强度以及梯度方向分布。考虑到HOG特征在计算过程中是在图像的局部单元进行的,因此受光照变化和噪声影响较小,具有良好的鲁棒性。HOG特征具有良好的表达图像中目标边缘信息的能力,因此只要被检测物体的形状具有一定的规律性,都可以被HOG特征描述,而且HOG特征可以容许被检测物体具有一些局部的细微变化。由于智能变电站中的仪表图像是在机器人移动过程中拍摄得到的,难免会产生一定变形,HOG特征能很好地克服变形导致的识别难的问题,因而HOG特征非常适合作为描述图像中仪表特征的特征描述子。
图2描述了一张图像中仪表的HOG特征提取流程,即将一张图像划分为若干个cells,如图2(b)所示,相邻的cell没有重叠。在每个cell内统计梯度方向直方图作为cell的特征descriptor,即将所有梯度方向划分为9个bin,作为直方图的横轴,角度范围所对应的梯度值累加值作为直方图纵轴。但是由于图像中不同区域的光照条件等变化多样,梯度值的变化范围会比较大,因此考虑将上下左右相邻的2×2个cells组成一个block整体,如图2(c)所示,一个block内所有cell的特征descriptor串联起来作为该block的特征descriptor,然后标准化每个block的特征descriptor,这种特征标准化处理使其对光照变化和阴影有更好的适应能力,对于检测率的提高相当重要。同时相邻block之间要有一定的重叠,这样可以有效地融入相邻cell间的空间信息,对于检测结果有很大帮助。一个影像内所有block的特征descriptor串联起来作为最终的用于描述当前图像的特征向量。图2(d)为将当前图像中每个cell的特征descriptor平铺的结果。
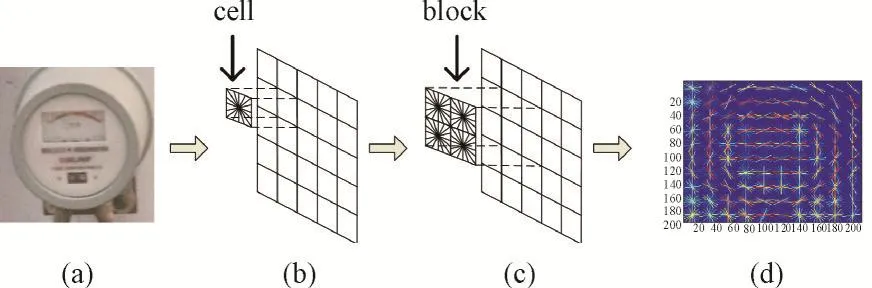
图2 仪表HOG特征提取流程Fig.2 Meter HOG feature extraction process
图3中通过场景中不同地物的HOG图对比,可以得出HOG特征有效地描述了图中不同物体的轮廓信息。

图3 场景中不同地物的HOG图对比Fig.3 HOG map comparison of different landmarks in the scene
1.2 基于稀疏表示的仪表识别
基于稀疏表示[10]的识别方法可在高维空间对信号进行重构,通过重构信息的稀疏性判别目标分类。稀疏表示是指图像(或者特征)信息可以完全或者近似地由非常少的一组原子图像(或者特征)信号的线性组合表示,而所有的原子图像(或特征)信号即组成一个过完备的字典。假设训练样本特征向量集合X=[x1,x2,...,xn]T∈Rn×m,其中xi∈R1×m,i=1,2,...,n,表示第i个输入特征向量,m表示输入特征向量的维数,基向量集合D=[φ1,φ2,...,φK]T∈RK×m,也称为视觉词典,其中K表示基向量的个数(且K>>m),φj∈R1×m,j=1,2,...,K表示第j个基向 量 ,,其中i=1,2,...,n对应于第i个输入特征向量经视觉词典转化后的向量,对应于第i个输入特征向量的线性组合中基向量φj的系数,原理示意图如图4所示,也就是说对于每个输入特征向量

图4 稀疏表示原理示意图Fig.4 Sparse representation of the principle diagram
图4中,灰度深浅表示特征向量对应维数的取值大小,灰度值越大,对应维数取值越大,白色表示取值为0。
实际上,可以将稀疏表示中特征向量的求解过程归结为求能量函数最小化的问题,即:

式(1)中,第一项为重构误差项,第二项为稀疏惩罚项,λ为稀疏系数。给定训练样本特征向量集合X,学习得到一组“超完备”基向量集合D。训练过程是一个重复迭代求解的过程,通过交替更改D和α使得能量函数最小化。字典的构造是一种寻找稀疏表示下最优基的构造,字典的优劣是原始信号能否尽可能稀疏表示的关键。字典的构造不仅要满足稀疏表示唯一性的约束。
不同类别训练样本训练的字典对待测样本的稀疏表示能力差别很大,待测样本更易被同类别训练样本得到的字典稀疏表示。根据稀疏表示的这一特性,研究设计了基于稀疏表示的分类器。
记所有基于HOG特征的向量表示仪表训练数据集为{Hi∈Rm,i=1,2,...,n},其中每个样本Hi表示一个仪表样本的HOG特征。初始化字典D=[H1,H2,...,Hn]∈Rmxn,采用S-KSVD算法对字典进行训练得到过完备字典D并计算稀疏系数,经过试验S-KSVD算法可以在较短时间内训练得到重构信息PSNR值较高的字典。
设待检测样本y∈Rm是待识别目标基于HOG特征的向量表示,给定稀疏约束因子L,求解L2范式最小化,如式(2)

式(2)的求解是寻找一个在满足稀疏约束因子L条件下取得最小重构误差的稀疏表示的过程。
在式(2)得到最优稀疏表示的基础上,计算y在字典D上的残差

此处可通过构建包含N类仪表样本(本文中N=2,即仪表和非仪表两类)的字典并计算信号在各样本字典上的稀疏表示残差

最后通过比较残差值,最小残差所在的类别即为信息的目标分类

式中,C(y)表示信号;y是仪表还是非仪表。
2 实验与分析
为了验证本文提出的基于局部HOG特征的稀疏表达识别算法的有效性,在Matlab平台、Intel P42.33GHz、2GB内存的计算机上,采用实际场景拍摄的智能变电站场景的仪表数据进行试验并对部分实验结果做定性和定量的分析和评价。
在HOG特征提取的单元和块的选择上,过小的单元、块和直方图bin导致计算量的指数增加,过大则会对目标特征描述不清,需选择折中的参数作为本方法的使用参数。表1为实验选择不同的参数及相应的识别率。

表1 不同HOG特征参数及相应的识别率Tab.1 Different HOG characteristic parameters and the corresponding recognition rate
通过表1对比,当HOG特征采用15*15像素/单元,2*2单元/块,9个直方图bin时的识别率较高。因此本文使用第二组参数用于目标HOG特征提取。
部分实验结果如图5所示,对于部分实验场景而言,如图5(a)-(c)场景中不存在类似仪表边缘的这种圆型结构,本文提出的模型具有较为理想的识别结果,然而对于较为复杂的实验场景(如图5(d)-(f)),场景中存在较多类似仪表外形的圆型结构导致算法的识别效率较低。

图5 部分实验结果Fig.5 Some experimental results
为验证基于稀疏表示的识别方法的有效性,本文将本方法与文献[15-16]的识别方法进行比较。实验对于文献[15]选用不变矩图像匹配的方法进行实验,对于文献[16]选用HOG+SVM是用于图像中目标识别的典型方法,因此本文也将这种方法作为对比方法。图6是3种方法在不同场景下的仪表识别率,其中最佳场景是指正对仪表拍摄并且不存在遮挡情况下的识别结果。由图6可看出本文车辆识别方法在多场景下都具有较好的识别效果。
图7给出了文献[16]中使用SVM分类法与本文使用SRC法的平均识别率的比较。从中可看出:SRC方法在特征数大于1 000时识别准确率高于SVM分类法,在一定程度上也说明稀疏表示分类随着特征维数的增加保持相应的收敛性,SVM分类法则会随着特征维数的增加趋于发散,而且SVM分类法的分类能力很大程度上取决于特征选取方法。
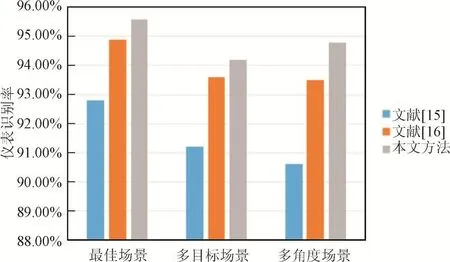
图6 多场景下不同方法识别结果比较Fig.6 Comparison of different methods in multi-scene recognition results
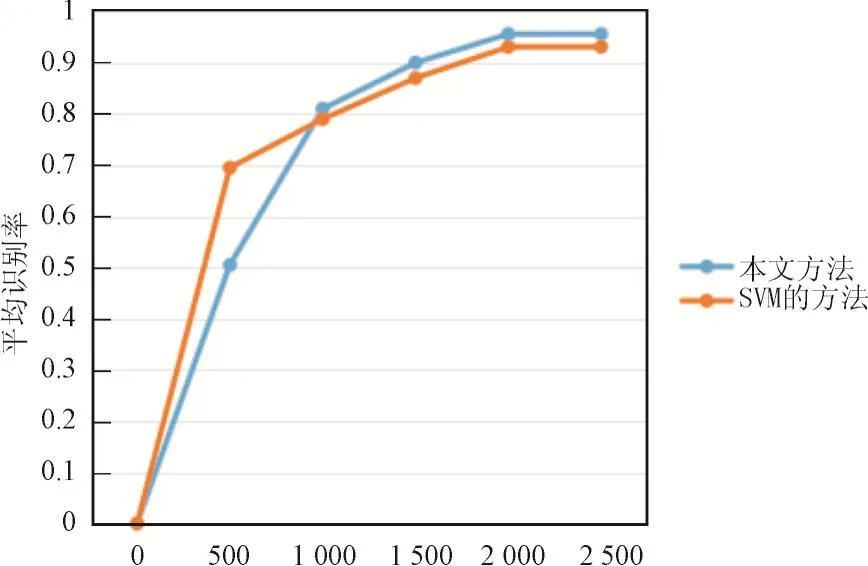
图7 本文方法与使用SVM方法识别结果比较Fig.7 The method in this paper is compared with the method of SVM
3 结语
本文通过研究稀疏表示理论,将稀疏表示中的分类方法引入到变电站的仪表识别中,采用不变性较好的方向梯度直方图对目标进行特征提取。与传统方法不同的是,本方法从信号特征的稀疏性角度,在高维空间对信号进行重构,通过重构信号的稀疏性判别目标分类。下一步工作将围绕进一步提高使用稀疏表示对于目标识别分类方法的计算速度和稳健性(如在高清视频中的处理以及更多角度对仪表识别),并且可以尝试通过稀疏字典具体仪表类型以及仪表位置识别后的读数。
[1] 张靖.变电站设备巡检移动机器人的研究与设计[D].保定:华北电力大学(河北),2010.
[2] 杨作梁,杨森.利用电力变压器损耗为变电站房屋供暖探索[J].节能技术,2015,33(6):559-561.YANG Zuoliang,YANG Sen.Research on the Substation Buildings Heating Using Power Transformer Loss[J].Ener⁃gy Conservation Technology,2015,33(6):559-561.
[3] 王学伟,于锴峰,王琳.红外图像锁相滤波去噪算法的研究[J].电测与仪表,2008,45(6):42-46.WANG Xuewei,YU Kaifeng,WANG Lin.Research on the Locked Filter Denoising Algorithm of Infrared Images[J].Electrical Measurement&Instrumentation.2008,45(6):42-46.
[4] HEGT H A,DE L H R J,KHAN N A.A high perfor⁃mance license plate recognition system[C]//IEEE Interna⁃tional Conference on Systems,Man,and Cybernetics.IEEE Xplore,2015:4357-4362 vol.5.
[5] 朱颢东,李红婵.基于特征加权模糊模板匹配的字符识别[J].兰州理工大学学报,2013,39(1):68-71.ZHU Haodong,LI Hongchan.Character recognition based on feature weighted fuzzy template matching[J].Journal of Lanzhou University of Technology.2013,39(1):68-71.
[6] 李秀君,黄山,李宁,等.一种新的倾斜印刷体字符的校正方法[J].微计算机信息,2009,25(21):259-260.LI Xiujun,HUANG Shan,LI Ning,et al.A New Method for Correcting Inclined Printed Characters[J].Microcomput⁃er Information,2009,25(21):259-260.
[7] 王瑞,李琦,方彦军.一种基于改进角度法的指针式仪表图像自动读数方法[J].电测与仪表,2013,50(11):115-118.WANG Rui,LI Qi,FANG Yanjun.A kind of automatic reading method of pointer instrument image based on im⁃proved angle method[J].Measurement&Instrumentation.2013,50(11):115-118.
[8] 李学聪,汪仁煌,唐苏湘,等.指针式仪表图像的六步预处理方法[J].电测与仪表,2012,49(12):28-31.LI Xuecong,WANG Renhuang,TANG Suxiang,et al.Six-step preprocessing method of pointer instrument images[J].Measurement&Instrumentation.2012,49(12):28-31.
[9] DALAL N,TRIGGS B,2005.Histograms of Oriented Gradients for Human Detection.IEEE Conference on Computer Vision&Pattern Recognition,pp.886-893.
[10]MAIRAL J,ELAD M,SAPIRO G.Sparse Representation for Color Image Restoration[J].IEEE Transactions on Image Processing A Publication of the IEEE Signal Processing Society,2008,17(1):53.
[11]RUBINSTEIN R,ZIBULEVSKY M,ELAD M.Double Sparsity:Learning sparse dictionaries for sparse signal ap⁃proximation[J].IEEE Transactions on Signal Processing,2010,58(3):1553-1564.
[12]周戈,曾智.采用不变矩图像匹配与直方图的仪表识别算法[J].华侨大学学报(自然版),2017,38(2):225-228.ZHOU Ge,ZENG Zhi.Instrument identification algorithm using invariant moment image matching and histogram[J].Journal of Huaqiao University(Natural Science).2017,38(2):225-228.
[13]岳国义,李宝树,赵书涛.智能型指针式仪表识别系统的研究[J].仪器仪表学报,2003,24(z2):430-431.YUE Guoyi,LI Baoshu,ZHAO Shutao.Research on IntelligentPointerInstrumentRecognition System[J].Chinese Journal of Scientific Instrument.2003,24(z2):430-431.
[14]李治玮,郭戈.一种新型指针仪表识别方法研究[J].微计算机信息,2007,23(31):113-114.LI Zhiwei,GUO Ge.Research on a New Pointer Instru⁃ment Identification Method[J].Microcomputer Information.2007,23(31):113-114.
[15]SUN Z,BEBIS G,MILLER R.On-road vehicle detection using evolutionary Gabor filter optimization[M].IEEE Press,2005.