水轮机调速器PID调节规律研究
2018-01-25胡千佳罗庆跃邹长春
胡千佳 罗庆跃 邹长春
(邵阳学院 湖南邵阳 422000)
1 引言
在水轮机运行过程中,数字PID可对机组转速进行调节,与传统的机调和电调相比维护难度较小,同时可实现综合自动化控制,应用优势明显。因此,对水轮机调速器PID调节规律进行详细探究具有重要的现实意义。
2 水轮机调节的任务和特点
水轮机调速器是由多个元件组成的,包括测量、放大、执行元件等,其调节对象为水轮机、发电机、引水系统等。在调速器PID的实际应用中,水轮机发电机组首先将转速信号传递至需被测量的元件上,然后对元件的频率信号进行测量,将其转化为电压信号,最后将该信号传递与给定信号进行比较,确定频率偏差实际情况,并就此进行调节。调节指令被放大后,即可传送至执行机构中,推动导水机构,与此同时,反馈元件还可将导叶开度的变化情况传递至加法器中。水轮机调节系统结构形式如图1所示。

图1 水轮机调节系统方块图
3 水轮机调节系统PID控制原理
在水轮机运行过程中,调速器PID是一种常见控制方式,常规PID控制系统原理如图2所示。
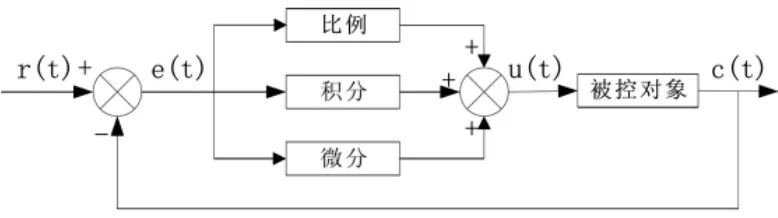
图2 PID控制系统原理框图
PID控制器是一种线性控制器,根据给定值r(t)以及实际输c(t),即可确定偏差:

对于偏差比例(P)、积分(I)以及微分(D),可以根据线性组合形成控制量,然后对被控对象进行控制,其控制规律如下:

在上述公式中,KP、KI、Kd-比例、积分、微分增益。
PID控制方式可充分发挥KP、KI、Kd作用,由于其取值有所不同,比例、积分、微分的作用强弱也有区别。其中,KP能够决定水轮机系统控制作用强弱,如果KP较小,则系统所需时间也较长,如果KP较大,系统相应所需时间较短,这样很难保证系统运行稳定。有些被控对象具有自平衡特性和静差,通过增加KP,可减少静差,但是若KP较大,则动态性也会降低,进而影响闭环系统稳定性。另外,若KI过小,则会造成系统相应变慢,KI增大,则系统相应效率比较高,同时还可以对记忆误差积分,进而消除静差。如果Kd比较小,则微分效果比较差,随着Kd增加,在受到非最小相位环节的影响下,反调节也会随之增加。水轮机微分控制的优势在于可对误差进行微分处理,同时,对误差变化的敏感度较强。
4 PID参数整定方法
4.1 基于对象参数辨识的整定方法
在被控过程对象参数的辨识和整定过程中,需采用辨识方法对数学模型进行计算,再应用整定算法确定控制器参数。如果辨识方法、整定算法不同,整定方案也会有所不同。参数模型辨识法、非参数模型辨识法是两种常用的辨识办法,其中,在对象参数模型辨识方法的应用中,首先需假定一种模型结构,然后根据极小化模型,确定函数模型参数。若事先无法确定模型结构,则首先需要采用结构辨识的办法确定模型结构参数,然后再应用参数整定办法实现参数优化。
4.2 基于抽取过程对象输出响应特征值的控制器参数整定方法
基于对象模型辨识的参数整定操作便捷,由于对象模型中冗余信息量较大,因此,可能会对控制器参数整定造成不良影响,同时控制器参数并不是确定的,对此,首先需要对控制器进行整定处理,这样才能够包容对象模型,保障系统稳定性。根据对象输出相应特征值来实现PID参数整定的办法众多,比如闭环Z-N方法、继电整定法等等。
4 .3参数优化方法
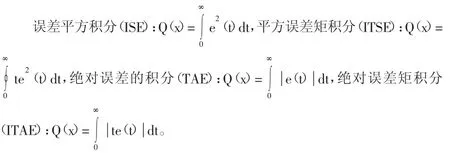
从运筹学角度而言,控制器参数整定指的是在一定的条件约束下,对控制器参数进行调整,从而使得某个目标函数能够达最优值。在实际应用中,首先需提出合适的目标函数,采用寻优策略,对控制器参数进行整定,这样才能够反映出系统的调节情况:,式中,ts-指定过渡过程时间,ts0-参数x下系统过渡过程时间。,式中,Mp-指定超调量,M0p-参数X下系统超调量。
另外,还有一种目标函数是误差目标函数:
在参数优化方面,主要有两种方法,间接与直接优化。间接优化指的是首先写出目标函数,然后根据函数取值的充分条件和必要条件,计算最优参数;直接优化指的是首先对参数空间进行分析,根据一定的规律寻找最优参数,据此所获得的目标函数即为最小参数点。在参数优化时,无需被控对象的数学模型,只需采用试验办法,结合目标函数,即可获得相关系统动态特征量。
但是,参数优化也有局限性,具体体现在寻优目标函数的提取和确定方面。在选择目标函数过程中,无论是应用直接指定调节品质指标的方式,还是误差积分型指标,都有一定的局限性。除此以外,由于控制系统具有多值性特征,因此,在参数优化方面也有不足。对此,还应该积极研究相关优化方式,妥善解决参数整定问题。
5 结语
综上所述,水轮机调速器PID技术发展迅速,在水电站机组调节控制中广泛应用,微机调速器调节参数的整定难度较大,同时,不同水电站和机组的微机调速器参数整定方式都有所不同。对此,为了实现参数优化目标,要求水轮机发电机组工作人员学习先进技术,掌握调节办法,充分发挥水轮机调速器的应用优势。
[1]方红庆,陈龙,李训铭.基于线性与非线性模型的水轮机调速器PID参数优化比较[J].中国电机工程学报,2010,30(5):100~106.
[2]曹程杰,莫岳平.基于现代智能控制技术的水轮机自适应工况PID调速器研究[J].电力系统保护与控制,2010,38(3):81~85.
