在商用型MPV上开发家用型MPV
2018-01-25李小俊
李小俊
(安徽江淮汽车集团股份有限公司,安徽 合肥 230009)
引言
平台化是指在开发新车型时使用相同或者近似的底盘系统,该底盘系统可满足开发车型的承载能力要求,在同一平台下可以衍生出风格迥异的多种产品,大众汽车是平台化最成功的企业,同平台技术的应用提高了零部件的通用化,降低成本、缩短开发周期。本文主要针对市场营销在大量市场调研情况下需要开发一款家用MPV车型,根据底盘动力学性能,正确匹配悬架参数,利用ADAMS仿真工具,在现有商用MPV平台上开发一款家用MPV车型,通过分析计算整车性能符合家用MPV要求。底盘系统主要由悬架、转向、制动三大部分组成, 根据市场调研,在商用MPV上开发家用MPV整车尺寸相当,重量相当,造型符合家族风格,底盘舒适型增强。为缩短开发周期及降低开发成本,转向、制动主体部分沿用商用 MPV,悬架系统需重新开发,悬架系统主要影响整车的操稳性能、平顺性及承载性能,将前期的开发经验应用于新车型中形成一个跨院、跨事业部合作、同步协作、多平台同步开发的合作模式,提升悬架正向开发与整车匹配能力,整车性能目标统筹考虑,设计更优化。
1 整体框架的构思
悬架开发及整车匹配工作整体分为:匹配启动(前期仿真分析)、整车性能(mule车整车性能实验)、匹配实验(实验验证及整改)、匹配结束。

图1 整体框架
2 技术方案
2.1 操稳性:导向机构设计
导向机构影响操纵稳定性的最主要因素,操稳性分析主要进行导向机构设计,本文悬架导向机构由纵拉杆(上下臂)和横向推力杆(扭梁)组成。
2.1.1 导向机构设计要求
(1)悬架簧上载荷变化时,保证轮距变化不超过±4.0mm,轮距变化大会引起轮胎磨损;
(2)悬架簧上载荷变化时,四轮定位参数在设计范围之内;
(3)汽车转弯行驶时应有合适的车身侧倾角,在 0.4g侧向加速度作用下,车身侧倾角不大于6º,车轮与车身的倾斜同向来增强不足转向效应。
2.1.2 导向机构的布置参数
(6)发电机在电力系统中运行时,由于受到外界因素的干扰,可能会因为外部短路引起过电流,为系统带来不利影响。当发电机容量在1MW以下时,只需要装设过电流保护即可;如果发电机容量大于50MW时,需要装设复合电压启动过电流保护。
(1)纵倾中心:采用作图法作上下臂转动轴的平行线,两线交点即为纵倾中心,P点即为纵倾中心。
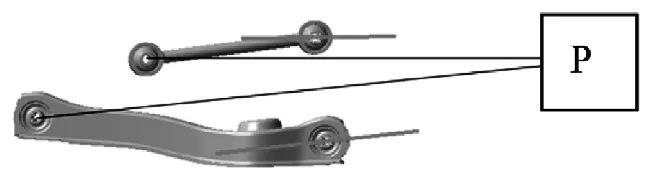
图2 纵倾中心
(2)侧倾中心:通过车轮中心的横向垂直平面上的一点,在这点上给簧载质量施加一个侧向力,使簧载上质量不产生侧倾运动。根据汽车动力学C卷(M米奇克著),带横向推力杆的后悬架,其侧倾中心在横拉杆与汽车中心垂直轴的交点上。
(3)上下纵臂长度的确定:双纵臂式悬架的上、下臂长度对车轮上、下跳动时前轮的定位参数影响很大。双横臂式前悬架设计成上横臂短、下横臂长,轮距变化要小,轮胎磨损少,应选择上、下摆臂长度之比在 0.6左右;为保证汽车具有良好的操纵稳定性,希望前轮定位角度的变化较小,这时应选择上、下摆臂长度之比在 1.0左右。综合以上分析,悬架的上、下摆臂长度之比应在 0.6~1.0。美国克莱斯勒和通用汽车公司分别认为上、下摆臂长度之比取0.7和0.66为最佳。
2.1.3 侧倾角的计算

2.1.4 侧倾角刚度、刚度、侧倾稳定性
侧倾角刚度过小而侧倾角过大的汽车操纵稳定性较差,要求侧向加速度0.4g时,汽车车身的侧倾角不超过6º。
前、后悬侧倾角刚度的分配影响侧倾角大小,从而影响汽车转向特性,为满足汽车稍有不足转向的要求,应使前轮的侧偏角大于后轮的侧偏角,所以前轮的侧倾角刚度一般略大于后轮的侧倾角刚度。对于 MPV设计前后悬侧倾角刚度比值一般在 1.4~2.6。计算结果是 1.35,后悬侧倾角刚度偏大适当调小,侧倾稳定角满足设计要求,比宜商 MPV侧倾好。
2.2 平顺性
2.2.1 偏频的计算



前悬架偏频应满足1.0~1.6,后悬架偏频一般在1.17~1.58范围内,满足设计要求,悬架偏频比一般在0.8~1.0。
2.2.2 相对阻尼系数
(1)相对阻尼系数的确定
减振器的阻尼作用在与不同刚度及不同簧上质量的悬架系统匹配使用时,会产生不同的阻尼效果,用相对阻尼系数来判断振动衰减的快慢程度:


悬架阻尼的匹配计算为:

mf-悬架簧载质量
参考同类车型,取前悬相对阻尼系数=0.24;
取后悬相对阻尼系数=0.3;
(2)前后悬阻尼计算
减振器的阻尼系数是指卸荷阀开启前的阻尼系数而言即分为压缩行程相对阻尼系数及伸张行程相对阻尼系数,一般伸张行程的相对阻尼系数大于压缩时的相对阻尼系数。

K为悬架系统垂直刚度
2.2.3 前后悬架挠度的计算
悬架静挠度与偏频之间的关系:

其中fc为静挠度,nf为悬架偏频,悬架动挠度是满载平衡位置开始,悬架压缩到缓冲块最大允许变形量,动挠度的计算公式为:


表1 悬架计算结果
其中 fd为动挠度,Lp为减振器行程,Lh缓冲块长度,i′为杠杆比。总的计算结果如上:
2.3 承载性设计
分析悬架强度,满足整车的承载性能要求,分析流程如下:
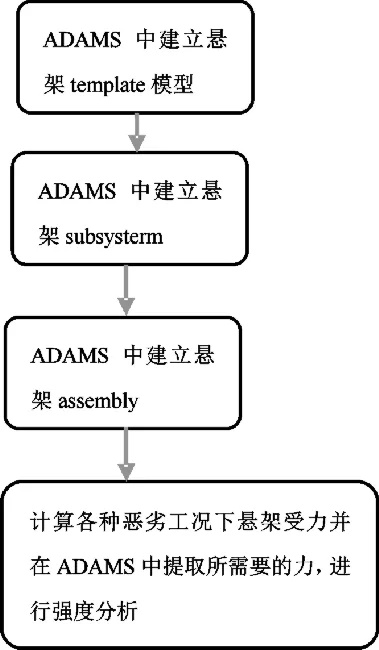
图4 悬架强度分析流程
3 悬架KC分析
通过对商用车型悬架、家用车型悬架及家用车型同类型悬架做同向轮跳、反向轮跳、侧向力加载、纵向力加载、回正力矩仿真分析,反跳外倾变化率仅取决于轮距,轮距越小变化越大,家用版车型轴距变化小,有利于减小上摆臂纵向冲击。
3.1 前束
后悬架是非独立悬架,后轮前束角不可调,后轮前束角靠轮毂断面角度进行保证,车轮上跳时前束多设计成零值或负值,负前束是整车质量变化引起质心位置变化时转向依然方便转向,本文前束基本为0。

图5 前束与轮跳的关系
3.2 外倾角
因为是非独立悬架,反跳外倾变化率仅取决于轮距,轮距越小变化越大。

图6 外倾角与轮跳的关系
3.3 后倾角
主销后倾角利于汽车直线行驶,主销后倾角越大主销后倾力矩越大,一般要求在~之间,图示在设计范围内符合悬架要求。

图7 后倾角与轮跳的关系
3.4 单边轮心距

图8 轮心距与力的关系
悬架更改后单边轮心距变化更小,减小轮胎磨损,对用户更有利。
4 结论
本文介绍了在宜商MPV上开发宜家MPV的过程,重点阐述了操稳性、平顺性及KC,利于ADAMS对悬架及整车进行仿真,缩短开发周期降低开发成本,为后期mule车搭载实验验证奠定理论基础。
[1] 赵海宾,赵巍.汽车悬架系统建模与仿真研究[J].汽车实用技术,2016.2.
[2] 余志生.汽车理论,北京:机械工业出版社,2000.
[3] 陈立平,张云清,任卫群,覃刚.机械系统动力学分析及 ADAMS应用教程.
[4] 廖抒华,曹珏,钟金志.ADAMS悬架模型精度提高的一种方法[J].汽车实用技术,2016,2.