不变量嵌入法解速度模糊的改进与实现∗
2018-01-21
(中国人民解放军91913部队40分队,辽宁大连116041)
0 引言
靶场测控网中的单脉冲跟踪雷达主要用于对火箭等飞行器目标进行实时跟踪,完成目标位置和特性的测量,在重频使用上以低重频为主。随着单脉冲测速技术的不断发展和火箭飞行器测速评定的需要,目标的径向速度测量已经成为单脉冲雷达的重要功能,即可用于分辨真假目标,进行目标识别,也为判断目标的飞行姿态提供了依据[1]。在低重频脉冲雷达测速回路中,对目标多普勒频率捕获与跟踪之初,可能跟踪在信号频谱的任一细谱线上,此时测出的多普勒频率存在严重模糊。因此,测速系统在捕获与跟踪目标之初,需要及时求出频率模糊值,并引导速度回路跟踪到信号零谱线上,才能给出真实的目标多普勒频率,即目标的径向速度。为准确地解速度模糊,本文提出基于“不变量嵌入法”全数字改进的解速度模糊方法,采用实时校验对测速结果进行监测和修正,有效地解决了测速回路存在速度模糊值经常解不出来的问题。
1 无模糊测速系统分析
低重频脉冲雷达测速过程可分为中频数字化、模糊多普勒速度提取和速度解模糊三步[2]。本文将实现该过程的整套系统称之为“中频数字锁频+不变量嵌入法的全数字改进解速度模糊”测速系统(简称“无模糊测速系统”),系统工作原理框图如图1所示。
无模糊测速系统的输入信号来自于雷达接收机的单载频相参脉冲串U i(t),即测速通道的和路中频信号,首先经中频A/D采集处理后,进行数字下变频和正交鉴相,经低通滤波器滤波并抽取后得到零中频I/Q基带数据;接着将I/Q基带数据存储在滑窗式存储器中,滑窗后得到的N个雷达重复周期的数据传送给测速谱线截获和跟踪部分;其次在谱线截获阶段,数字信号处理器根据N个周期的雷达回波数据对目标多普勒频率的变化率进行估计和平滑后,得到测速回路加速度的初值;然后在谱线跟踪阶段,数字信号处理器对N个周期的雷达回波数据用前一个周期得到的目标多普勒频率预报值进行数字混频和数字鉴频,得到目标的多普勒频率误差,送给测速回路进行α-β滤波,得到目标的多普勒频率滤波值、多普勒频率变化率的滤波值和下一个周期的多普勒频率预报值,送给数字混频器进行下次混频处理,形成全数字闭环测速;最后采用不变量嵌入法的改进算法,消除速度模糊后,得到一个实时的、精确的、无模糊的目标径向速度的测量数据。
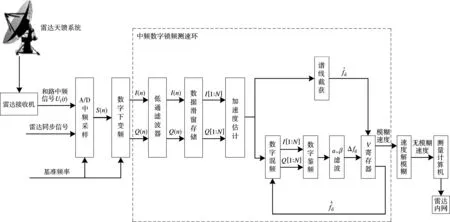
图1 低重频脉冲雷达无模糊测速系统工作原理框图
2 改进的不变量嵌入法速度解模糊方法
2.1 不变量嵌入法基本原理
文献[3]中不变量嵌入法原理图如图2所示,一路来自测速回路数字频率合成器测出的模糊多普勒频率f′d,由采样时钟采得数据,经比例转换器转换成与测距机测得的速度一样的量纲,送入减法器;另一路来自测距机的距离微分数据fR值,经同一时刻采样时钟采样,也送入减法器。两者之差反映了测速机与测距机求得的同一目标的速度之差。这个差值在估值运算器中进行均方误差最小意义下的估值运算,并由此计算出等效的误差谱线的根数,以此谱线根数去控制测速环路中的数字频率合成器,消除速度模糊。
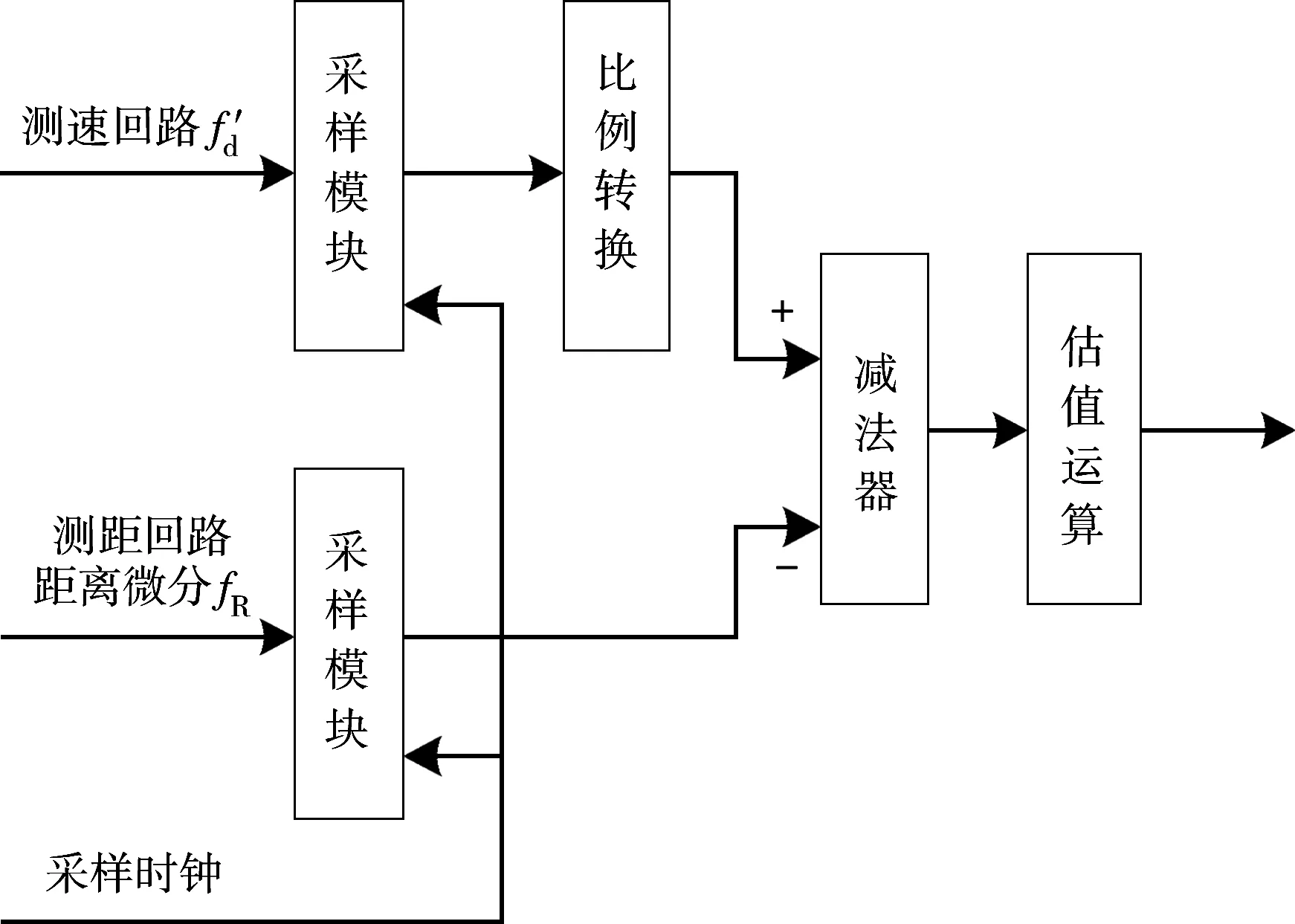
图2 不变量嵌入法原理图
目标径向速度与距离是相关的,而且距离微分速度dR(t)/dt又是无模糊的,其精度优于Fr/2,用这一数据与测速的数据相比较,经过适当的平滑处理,就可以求出精确的模糊谱线数L,用L×Fr去指定跟踪回路,使回路突跳一个频率,从而跟踪到中心谱线上去。在文献[4]中,不变量嵌入法是对测速和测距的数据作最佳处理,得到最精确的速度模糊值。具体地讲,就是用测距和测速支路所得到的二路距离数据进行抵消,去掉其中的高阶分量,然后用最小二乘法作最佳估值,求出模糊谱线的根数。
2.2 改进的不变量嵌入法实现
单脉冲测量雷达的速度测量是低重复频率雷达的速度测量,而目标一般处于高速运行状态,存在着严重的速度模糊,一般不能满足直接解算速度模糊的要求,本文提出基于不变量嵌入法的全数字解速度模糊方法。该方法的基本原理是:将测速回路中的速度滤波值、速度预测值及速度微分值经过处理后,代入测距回路中;经过一定时间的迭代后,对测距回路的距离微分采用最小均方误差法进行估计,解出速度模糊根数,工作流程如图3所示。
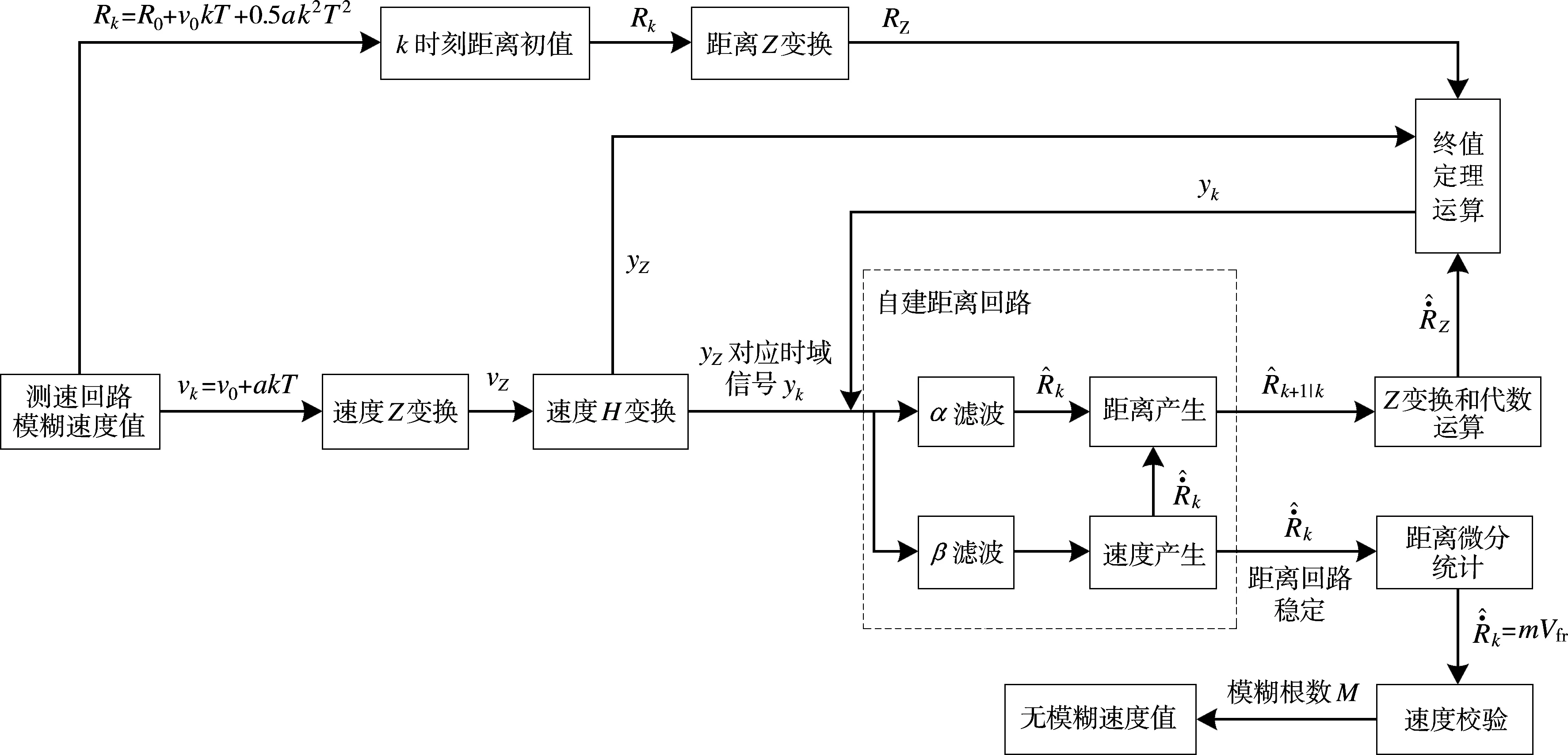
图3 不变量嵌入法的全数字解速度模糊方法流程
不变量嵌入法的全数字解速度模糊方法的数学基础是:当目标加速度运动时,目标k时刻目标的距离为R k=R0+v0k T+0.5ak2T2,其Z变换为R Z,目标的速度为v k=v0+ak T,其Z变换为v Z,将v Z通过H Z后得到y Z,对应时域信号为y k,将y k代入α-β滤波的距离跟踪回路中:
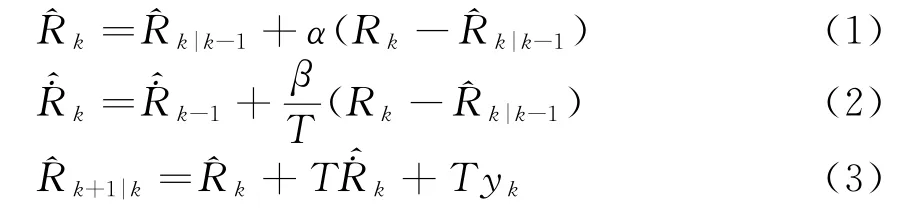
式中,α,β为滤波器的滤波系数,下标“k|k-1”为k-1时刻对k时刻的预测,上标“^”为对某值的估计,上标“·”为某值的微分值。
对式(1)、式(2)和式(3)进行Z变换,并进行代数运算后可得根据终值定理可得y Z代入,并令其为0,即可得对应的时域响应为

同理,如考虑加加速度(加速度微分)存在,可以证明此时y k可用下式代入:

为了防止距离和速度回路之间出现耦合,在真实的距离回路之外再自建一组距离回路,在后面的运算中都使用自建距离的输出。距离回路与速度回路分别进行各自闭环工作,当回路稳定后,利用速度回路的预测值、滤波值及微分值,按照式(4)或式(5)计算的y k代入到距离回路中的式(1)~式(3)中,当代入y k之后的距离回路稳定后,距离微分值所表示的输出值即为其中m为模糊根数,Vfr为重频对应的速度值。
当存在噪声及杂波时,此时复合控制后的距离回路中的距离微分值一般不为m Vfr,此时须对距离微分值作统计平均,使接近为Vfr的m整倍。由于目标高加速度的影响,目标回波信号谱线在频率域是运动的,测速回路动态滞后非常严重,需要对回波进行加速度和加加速度补偿,通过对回波信号利用多项式相位信号参数估计法获得加速度和加加速度信息,完成回波信号相位补偿,从而实现回波相参积累,并测量出目标的速度、加速度、加加速度等参数[5]。设目标的加加速度为J,考虑到测速回路复合控制后消除了距离回路中动态滞后的影响,此时距离回路中距离微分均值主要为速度回路中引入的动态滞后。由于速度回路中噪声引起的方差一般远远小于距离回路中微分的方差,因此距离回路中距离微分方差可只考虑为距离回路中引入的方差,即有
式中,αV,βV为速度回路的滤波系数,αR,βR为距离回路的滤波系数,var(R)为测距方差。为保证正确地解速度模糊,须满足雷达距离回路中距离微分均值小于半个脉冲重复周期对应的速度量,同时尽量减少噪声引起的方差,这是噪声环境下正确解速度模糊的条件。
2.3 速度校验
单脉冲雷达跟踪目标时,速度跟踪受目标噪声、杂波以及目标反射式频谱相位叠加现象的影响,使得反射频谱的质量严重下降,导致速度回路跟踪不稳定甚至频谱失锁,因此需要实时地对测速值进行校验及修正,准确地测出速度模糊根数。
设校验起始周期距离测量值为R0,之后第N个周期的距离测量值为R N,可以利用速度算出第N个周期的速度测量值为表达式如下:

式中,v为每个周期速度测量值。如果用R N减去R′N就可以得到ΔR N的表达式:


设解模糊得出的速度模糊根数为M,则遍历M-L到M+L得到序列[M-L,M-(L-1),…,M L-1,M L],L为预计偏差的最大模糊根数,则对于v也可以得到序列[v-L,v-(L-1),…,v L-1,v L],其中v i=v+i×Vfr,将其代入式(9)和式(10)就可以得到(2L+1)×N的阵列,计算每一个v i对应的距离ΔR累加和对时间的拟合求解,即利用公式
可以得到拟合斜率的序列[a-L,a-(L-1),…,a L-1,a L],则最接近0的斜率值a所对应的模糊根数M就是当前校验后的速度实际模糊根数。
3 算法验证
3.1 仿真验证
为验证本文提出的解速度模糊的正确性,进行计算仿真。设每个空间目标驻留32个周期,采用脉冲相关法时取k=16,Tr=1.7 ms,SNR=12 d B(跟踪所需信噪比),目标初速度v=450 m/s,加速度a=-1 000~1 000 m/s2,加加速度J=100 m/s3,雷达波长λ=5 cm。在测速回路中采用脉冲相关法与通道补偿法相结合对目标的加速度进行估计,加速度的估计误差如图4所示,可见该方法可在信噪比等于12 d B情况下实现对目标加速度的精确估计。
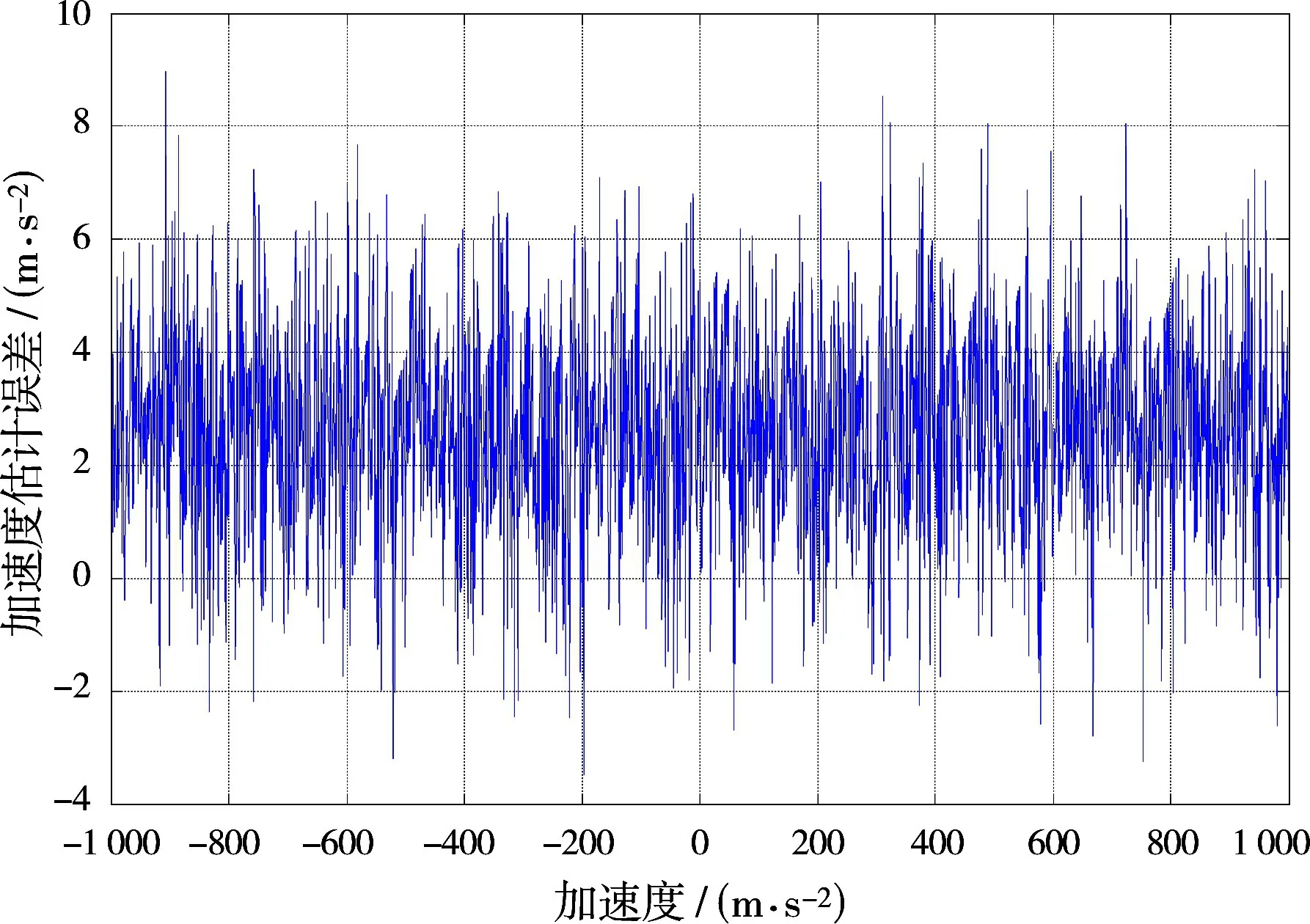
图4 加速度估计误差(SNR=12 dB)
考虑目标加速度和加加速度情况下解速度模糊的正确概率,依据式(6)和式(7),经过仿真可知,当加速度补偿精度不低于±10 m/s2、目标加加速度等于100 m/s3、单个脉冲信噪比等于12 dB时,解速度模糊的正确概率能够达到1。

图5 解速度模糊正确概率
3.2 跟踪飞机验证
为了进一步验证算法的正确性,以某型高精度单脉冲测量雷达为平台,对民航飞机进行跟踪测量,雷达工作在C波段,Fr=585 Hz,脉冲积累数为16个。民航飞机的跟踪结果如图6、图7所示。
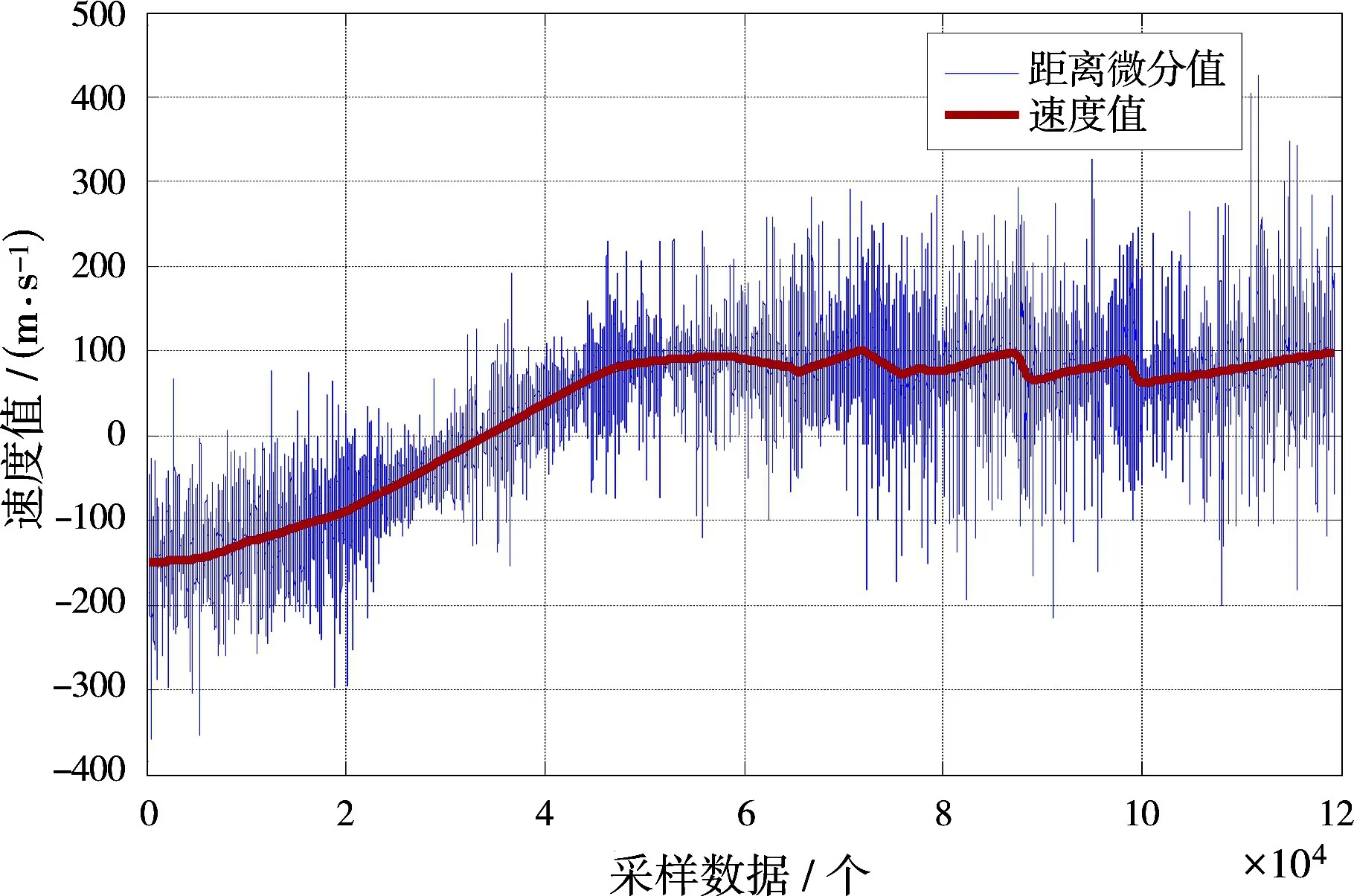
图6 跟踪民航客机测速结果分析图
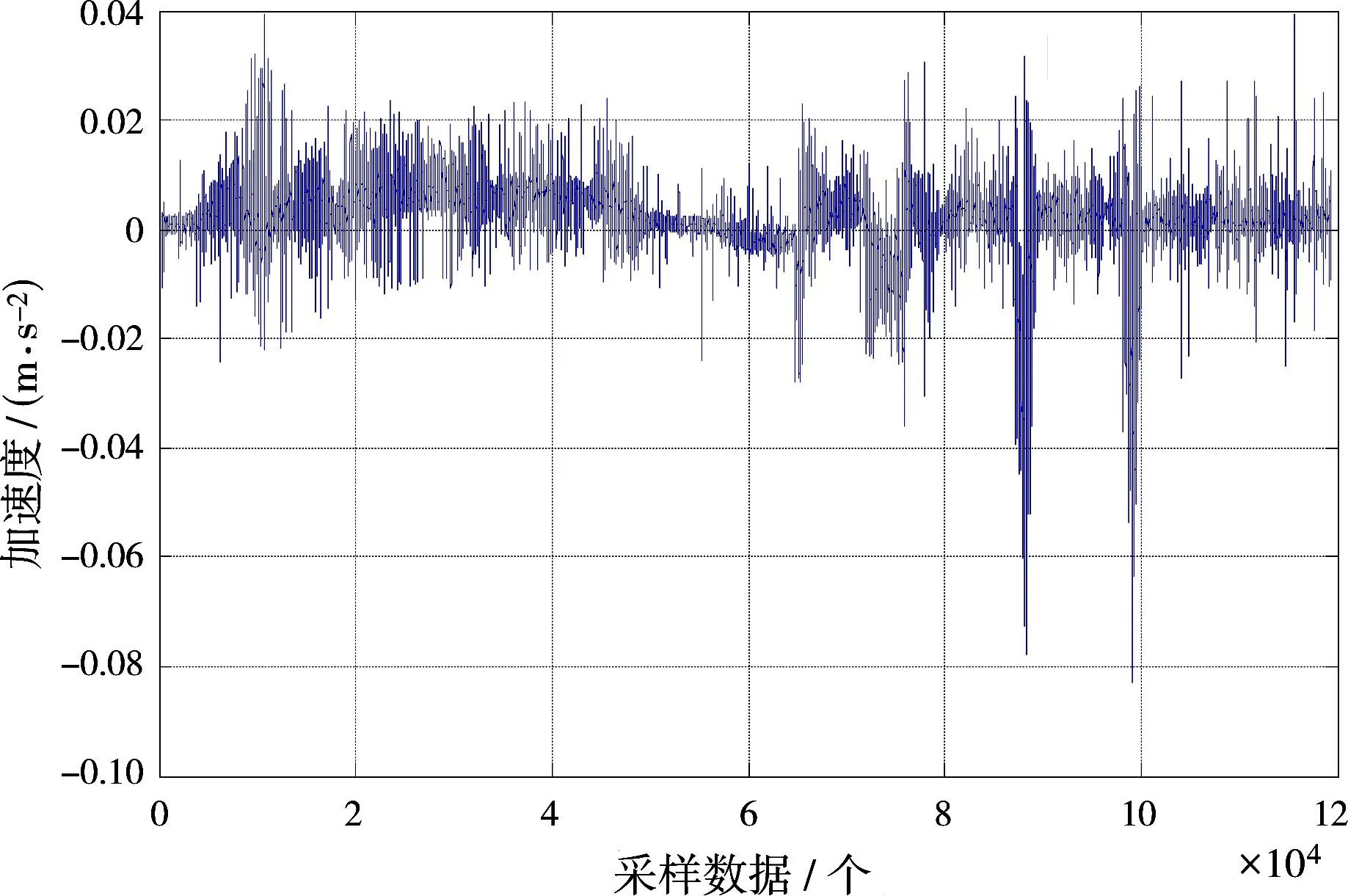
图7 跟踪民航客机速度差分值
通过对120 000个速度实际测量数据进行统计分析,可以看出整个速度跟踪过程比较稳定,两条曲线的轨迹也比较吻合,没有突跳点和测速丢失现象。
4 结束语
本文重点解决和改进了单脉冲跟踪雷达跟踪精确测量目标径向速度的关键技术,采用了改进的不变量嵌入法全数字实现快速的解速度模糊。即基于全数字处理,将测速回路中的速度滤波值、速度预测值及速度微分值处理后代入测距回路中,经过一定时间的迭代后,对测距回路的距离微分采用最小均方误差法解出速度模糊根数,并实时校验对测速结果进行监测和修正。该方法在计算机仿真和连续跟踪民航飞机真实数据中进行分析,详细分解跟踪数据的速度差分曲线和距离差分曲线,整个跟踪曲线非常平稳,充分验证了本文提出目标径向速度解模糊方法的可行性和准确性,因此在靶场和航天单脉冲跟踪测量雷达的测速设计中具有推广价值。
[1]ALABASTER C.脉冲多普勒雷达:原理、技术与应用[M].张伟,刘洪亮,译.北京:电子工业出版社,2016.
[2]吴涛,屈强,袁嗣杰,等.一种低重频脉冲雷达速度模糊解算的新方法[J].系统仿真学报,2009,21(增刊2):31-33.
[3]王德纯,丁家会,陈望东,等.精密跟踪雷达测量技术[M].北京:电子工业出版社,2006:359-361.
[4]车俐,蒋留兵.单脉冲精密测量雷达速度消模糊算法仿真及性能分析[J].船舶电子工程,2010,30(5):129-131.
[5]蔡玖良,桂佑林,汪文英.一种单脉冲测量雷达测速新方法[J].现代电子技术,2014,37(15):15-19.
[6]刘玉娟,徐佳龙,何蕾,等.高加速度下单脉冲测量雷达测速[J].现代雷达,2015,28(1):13-15.
