风力发电故障穿越技术综述
2018-01-19刘文洲王思远西灯考
刘文洲,王思远,李 宁,西灯考,杨 贺,刘 巡
(1.长春工程学院电气与信息工程学院,长春 130012; 2.长春工业大学电气与电子工程学院,长春130012)
0 引言
人类社会的快速发展引发了一系列问题,当今最突出的两个是环境问题和能源问题,因此各国政府都开始寻求新能源来替代传统的化石能源。风能作为一种广泛分布的能源,受到了更多的重视。然而,随着越来越多的风电场的规划建设,风电机组的装机容量也越来越大,已经在电网中占据一定的比重,但是,若电网发生故障时,风电机组不能像火电、水电等传统的发电厂那样向电网提供功率和频率的支持,而是直接脱网,这将导致电网电压和频率的震荡甚至崩溃,对电网造成冲击,危害电网的安全稳定运行[1]。所以,我们要求电网发生故障后风电机组不能任意退出运行,而是需要其参与到故障后电网的调节环节中,对电网提供支撑,提高电力系统的稳定性。
电力系统的故障会导致风力发电机组并网点电压的骤降与骤升,目前,各国都已推出了相应的规范来约束提高风电机组的故障适应能力。由于电网电压骤降故障较为常见,因此学者们对风电机组的低压穿越能力研究较为深入,而高压穿越能力正处于研究阶段,将来各国也会出现较为完备的规范。下文将针对以上概念和问题进行详细论述,以期为后续研究明确方向。
1 电网电压跌落原因及低压穿越
低压穿越即当电网故障或扰动引起风电场并网点的电压跌落时,风电机组能够在一定的电压跌落范围内不间断并网运行[2]。
1.1 电压跌落的原因
瞬态电网电压跌落故障的发生一般是由短路引起的,跌幅为10%~90%,持续时间为半个电网周期~几min。造成这种短路的原因:
1)元件损坏:绝缘材料的自然老化,设计安装及维护不良造成设备故障进而引发短路;
2)气象条件恶化:由于雾霾等原因造成绝缘表面脏污发生污闪,雷击造成闪络放电,架空线由于大风或表面覆冰导致杆塔倒塌等;
3)违规操作:运行人员带负荷拉刀闸,线路检修后未拆除地线便供电等;
4)其余原因:挖沟损伤地下电缆、鸟兽跨接在无绝缘线路两相之间等。
由此可见,引起低电压故障的原因有很多,在电力系统中,电压跌落现象很常见而且时有发生。
在三相系统中,根据短路发生的相数和接地与否大致可以分为如下几种短路故障:单相接地短路、两相短路、两相短路接地、三项短路[3]。表1列出了各种故障类型以及发生的概率。
由表1中可以看出,单相接地短路故障发生的概率最高,这种短路危害相对最小,三项短路故障发生的概率最低,这种短路对电力系统危害最大。

表1 电网短路类型发生概率
1.2 电压跌落对双馈风力发电机组的影响
由于双馈机组定子直接和电网相连,所以电网发生低压故障后将直接对电机的定子端产生影响。在发生三相短路故障时,由于定子磁链不可能发生突变,在故障发生的瞬间每相将激生一个直流分量,在发生不对称故障时还会激生出负序分量。这两种分量的存在将造成旋转的转子中电压和电流升高,若不采取措施限制升高的电压和电流,将对双馈机组造成破坏。
1.3 各国对低压穿越的规定
1.3.1 美国
风电场必须具有在电压跌至15%额定电压时能够维持并网运行625 ms的低电压穿越能力;风电场电压在发生跌落后3 s内能够恢复到额定电压的90%时,风电场必须保持并网运行(任何时间,只要电压值不低于图中的电压曲线)。绘出其图形如图1所示:横坐标表示时间,纵坐标表示并网点电压。

图1 美国风力发电低压穿越标准
1.3.2 德国
有功输出在故障切除后立即恢复并且每秒钟至少增加额定功率的20%。阴影区域中,有功功率每秒钟可以增加额定功率的5%;电网故障时,机组必须能够提供电压支持。如果电压降落幅度大于机端电压均方根值的10%,机组必须切换至支持电压。机组必须在故障识别后20 ms内通过提供机端无功功率进行电压支持,无功功率的提供必须保证电压每降落1%的同时无功电流增加2%。绘出其图形如图2所示。

图2 德国风力发电低压穿越标准
1.3.3 丹麦
故障穿越要求规定,三相故障从标称电压的20%~75%开始,持续10 s;风电场应在电压重新到达90%以上后,不迟于10 s发出额定功率;在电压恢复到90%后,应在不迟于10 s内满足与电网的无功功率交换要求。电压降落期间,风电场必须尽量发到风电场标称电流1.0倍的无功电流。图3所示是丹麦故障穿越标准。
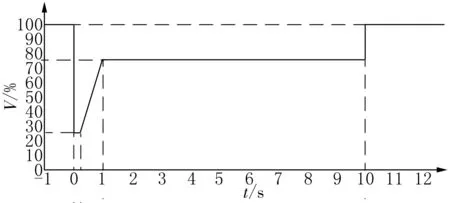
图3 丹麦风力发电低压穿越标准
除此之外,丹麦还规定了双重电压降落特性,规定要求两相短路100 ms后间隔300 ms再发生一次新的100 ms短路时不脱网;单相短路100 ms后间隔1 s再发生一次新的100 ms电压降落时要求也不脱网。
1.3.4 中国
我国2009年出台了相关标准:风电场内的风电机组具有在并网点电压跌至20%额定电压时能够保持并网运行625 ms的低电压穿越能力;风电场并网点电压在发生跌落后3 s内能够恢复到额定电压的90%时,风电场内的风电机组保持并网运行。如图4所示[4]。
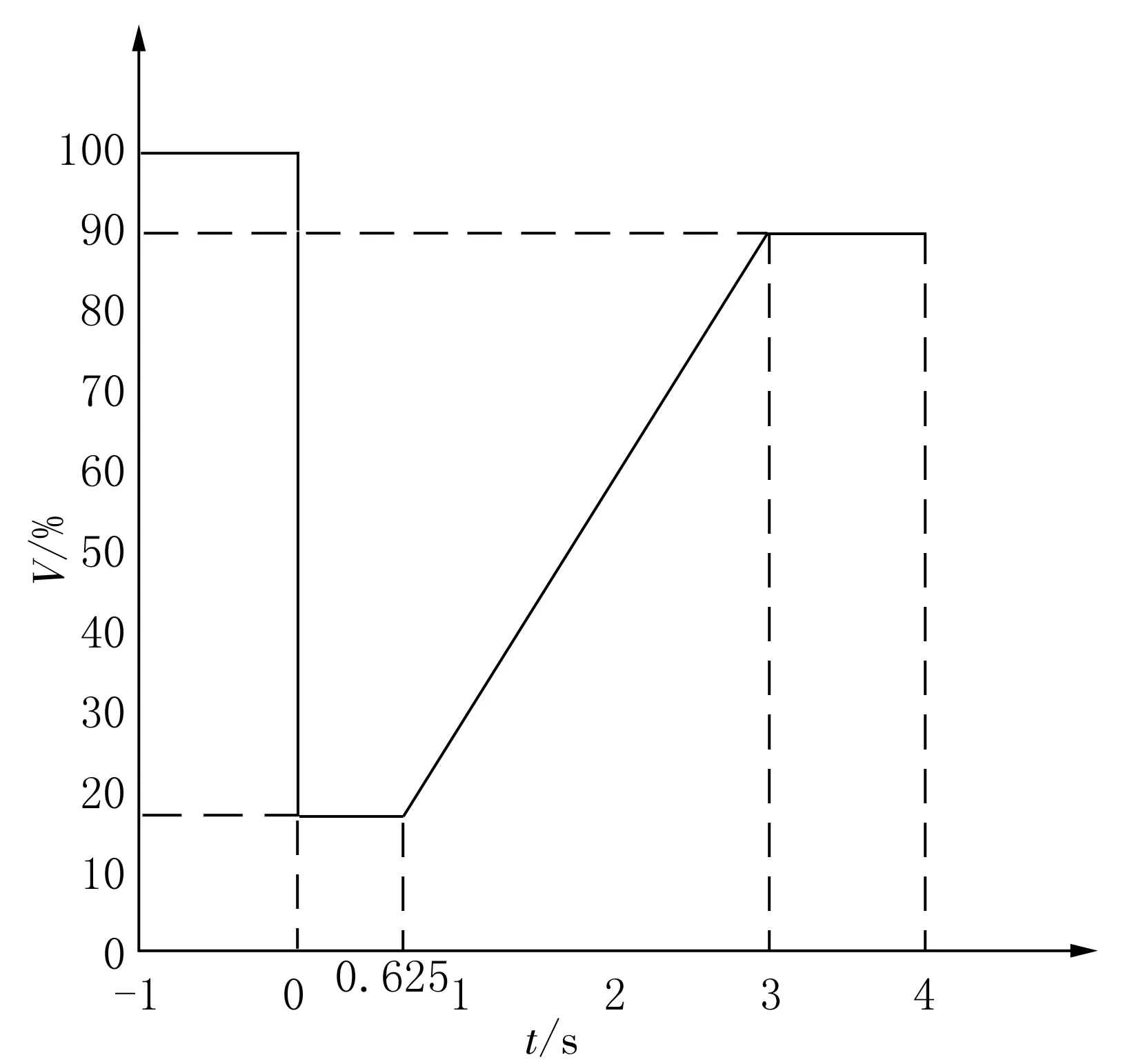
图4 中国风力发电低压穿越标准
1.4 低压穿越实现方案
针对双馈机组的低压穿越方案已有大量研究,提出的技术方案主要可以分为两种:一种是改进控制策略;另一种是改进硬件电路拓扑结构[5]。
1.4.1 改进控制策略
方案1:通过对转子电流进行定向,用转子产生的电流来抵消掉转子磁链中多余的成分;
方案2:把鲁棒控制中的H∞和μ-analysis技术应用到变流器控制当中;
方案3:通过对双馈风力发电机组网侧变流器传统的电压、电流双闭环的矢量控制策略加以改进,把静止无功补偿器的控制策略加入其中。
1.4.2 改进硬件电路拓扑结构
转子侧Crowbar电路:当电网电压大幅骤降时,转子侧可能会产生过电流,为消耗掉多余的能量,在转子侧串接电阻构成耗能回路,此电路被称为Crowbar电路。应用于低压穿越的Crowbar电路均利用SCR、IGCT、IGBT等可关断开关器件实现自由控制,其结构分为两种:三相可关断开关结构和二极管整流加IGBT结构,如图5所示。
直流侧Chopper电路:在电网发生低电压故障后,双馈机组的转子侧将会产生较大的冲击电流,将给直流侧电容充电,使直流母线电压升高,Chopper电路可以将多余的能量消耗,保证直流侧电压的稳定。Chopper电路由全控电力电子器件(一般为IGBT)和耗能电阻构成,图6所示为Chopper电路在双馈机组中的连接方式。
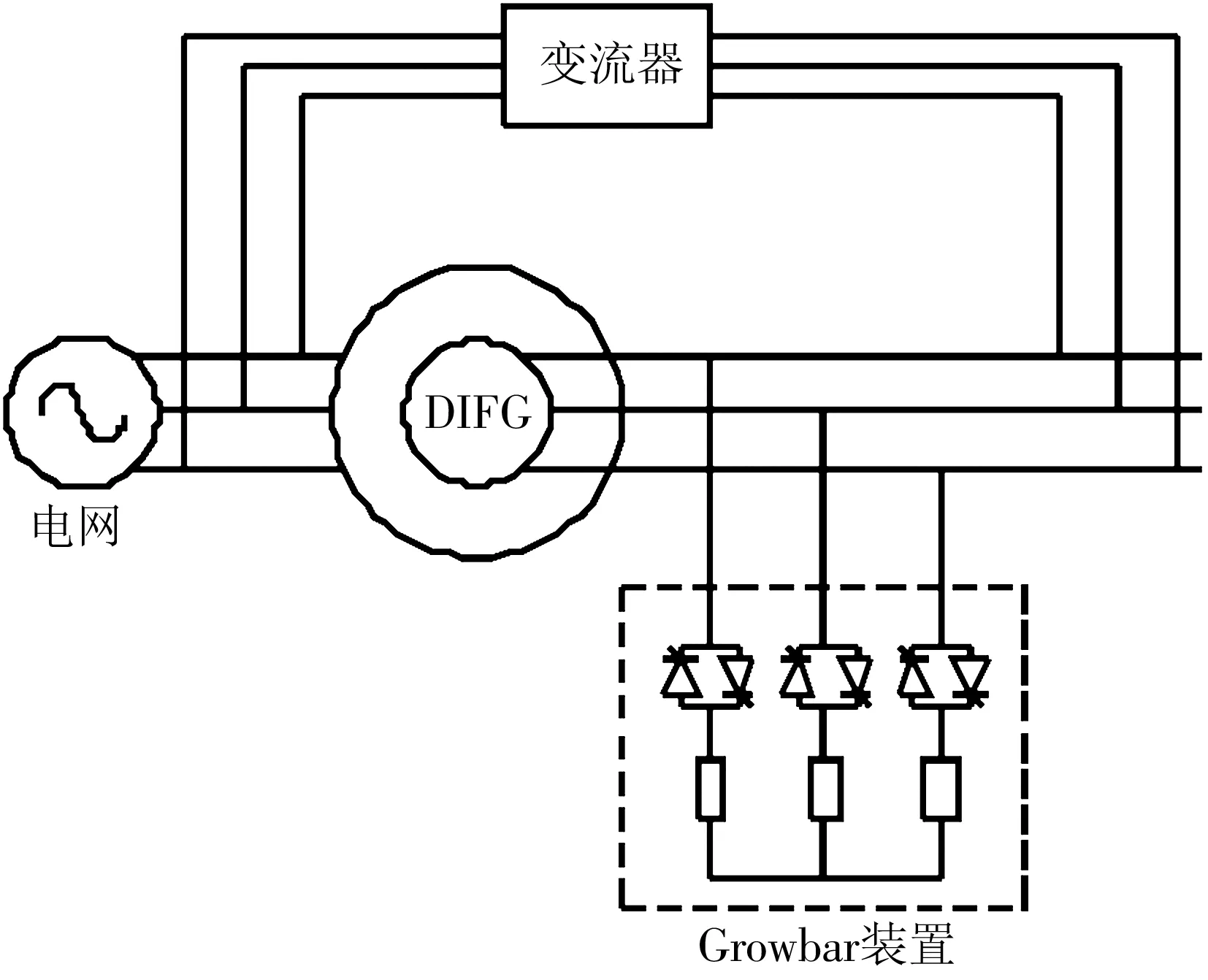
(a)三相可关断开关结构
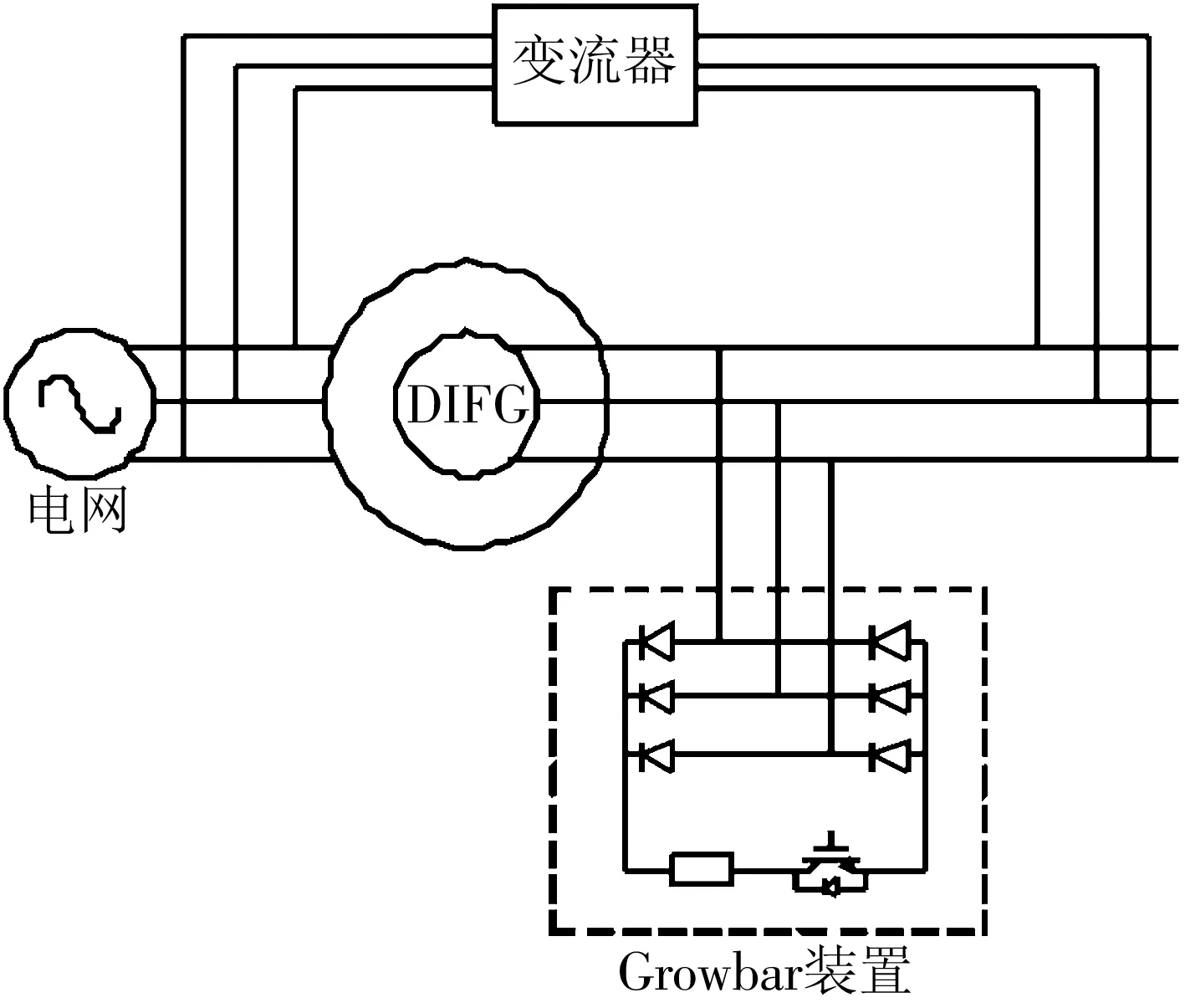
(b)二极管整流加IGBT结构图5 主动型Crowbar装置结构
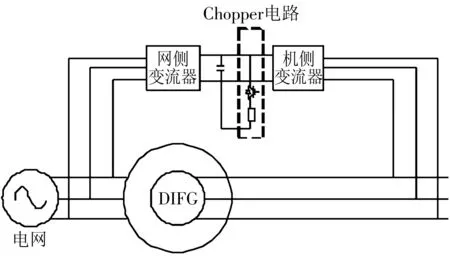
图6 Chopper电路结构
虽然解决方法种类很多,但是各有利弊。从两种大的分类来看,虽然改变控制策略的方法具有节约成本、简单易行的优势,但是这种方法受到定子和转子漏感的影响,漏感越大补偿能力越强,反之越弱;改变硬件电路的方式会增加成本投入,而且在保护电路投入运行时,将会造成双馈机组的短时失控。所以,有必要将两种控制方式结合起来,保证较好的低压穿越能力的同时,确保双馈机组的安全。
2 电网电压骤升的原因及高压穿越
高压穿越即当电网电压升高时,在一定的过电压范围内,风电机组能够不间断并网运行。
2.1 电压骤升的原因
电网电压骤升一般是由于无功功率过剩导致的。可以导致无功功率过剩的原因,主要有以下4种:1)当电网发生单相接地故障后,导致非故障相的电压升高;2)大功率用电设备突然断路;3)电流波动导致的电压升高;4)大容量容性无功设备的投入。
在风电场中,并网点电压骤升往往发生在电压骤降之后。在电网发生电压跌落故障后,会导致一些没有低压穿越能力的风电机组从电网解列,在电网电压恢复的过程中,一些具有低压穿越能力的风电机组会向电网提供无功支持,无功补偿装置也会对电网提供无功补偿,而由于控制系统的滞后性和无功补偿装置无自动投切功能,将导致风电场无功过剩,进而使得风电机组并网点电压升高,由于风电机组不具备高压穿越能力,将会导致那些经过低压穿越的机组脱网,使事故扩大,造成严重后果[6]。
2.2 高压穿越现状
目前高压穿越技术还处于研究当中,不如低压穿越成熟。澳大利亚首先制定了具有真正意义的高压穿越导则,该导则规定高压侧电网电压骤升至额定电压的130%时,风电机组应维持60 ms而不脱网,电网电压从额定值的130%回到额定值的110%时机组需要不间断运行900 ms并提供足够大的故障恢复电流[7]。这一要求完全可以抵御过电压故障。图7所示为澳大利亚的高压穿越标准。

图7 澳大利亚高压穿越标准
美国WECC并网导则要求,在电网电压升高到120%时,风电机组具有并网运行1 s的能力;在电网电压升高至118%时,风电机组具有并网运行2 s的能力;在电网电压升高至115%时,风电机组具有并网运行3 s的能力;在电网电压升高至110%时,风电机组具有持续并网的能力。图8所示为美国WECC高压穿越导则。
我国在高压穿越方面也在积极制订标准,2017年国家能源局制订了《风电机组高电压穿越测试规程》,今后有望成为我国的高压穿越标准。该规程规定:风电机组具有在测试点电压为130%额定电压时能够保证不脱网连续运行200 ms的能力;风电机组具有在测试点电压为125%额定电压时能够保证不脱网连续运行1 s的能力;风电机组具有在测试点电压为120%额定电压时能够保证不脱网连续运行2 s的能力;风电机组具有在测试点电压为115%额定电压时能够保证不脱网连续运行10 s的能力;风电机组具有在测试点电压为110%额定电压时能够保证不脱网连续运行的能力。图9所示为我国拟发布的高压穿越标准。
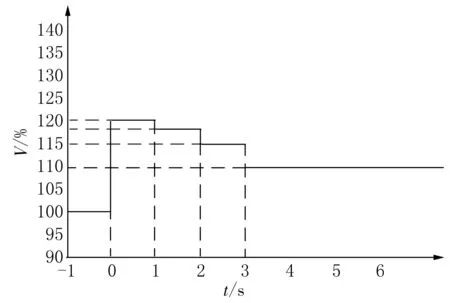
图8 美国WECC高压穿越导则

图9 中国拟发布的高压穿越标准
2.3 高压穿越实现方案
关于高压穿越的解决方案也可分为两类,即改进控制策略和改进硬件电路。
2.3.1 改进控制策略[8]
方案1:在风电机组不同阶段采取不同的控制方式。在正常情况下采用PI控制,在过电压故障时变流器采用基于滞环电流的矢量控制策略;
方案2:通过把谐振控制器加入到传统PI控制器当中,从而组成PI-R这种结构的控制器,在电网电压上升时对转子电流的抑制有一定作用;
方案3:直流母线电压随电网电压波动的控制策略,在电网电压升高或者降低时相应的调整母线电压的大小,减小了电网电压对变流器的冲击。
2.3.2 改进硬件结构[9]
方案1:在电网电压骤升时,也会伴随着直流侧电压的骤升,因此也需要在变流器直流侧增加Chopper电路,以抑制电网电压骤升可能导致的网侧变流器能量逆向流动而引起的变流器直流侧电压上升;
方案2:转子侧变流器串联电阻以抑制转子过流的方案,从而避免了机侧变流器在电网故障时因撬棒电阻的投入而失去对发电机的控制,并能够在故障期间持续对电网提供无功支持,减少转矩的脉动;
方案3:电网电压骤升时采用静止同步补偿器(STATCOM)和动态电压恢复器的方案。
在电网电压骤升的情况下,必须要确保风电机组自身具有较好的高压穿越能力,同时也需要配合其他手段,更好地实现高压穿越能力,例如硬件电路解决方案中的方案一与方案三结合,在风电机组处利用直流侧Chopper电路对机组进行保护,在并网点处加装静止同步补偿器来调整并网点电压,从而达到较好的高压穿越效果,以双馈机组为例,画出其硬件结构图如图10所示。
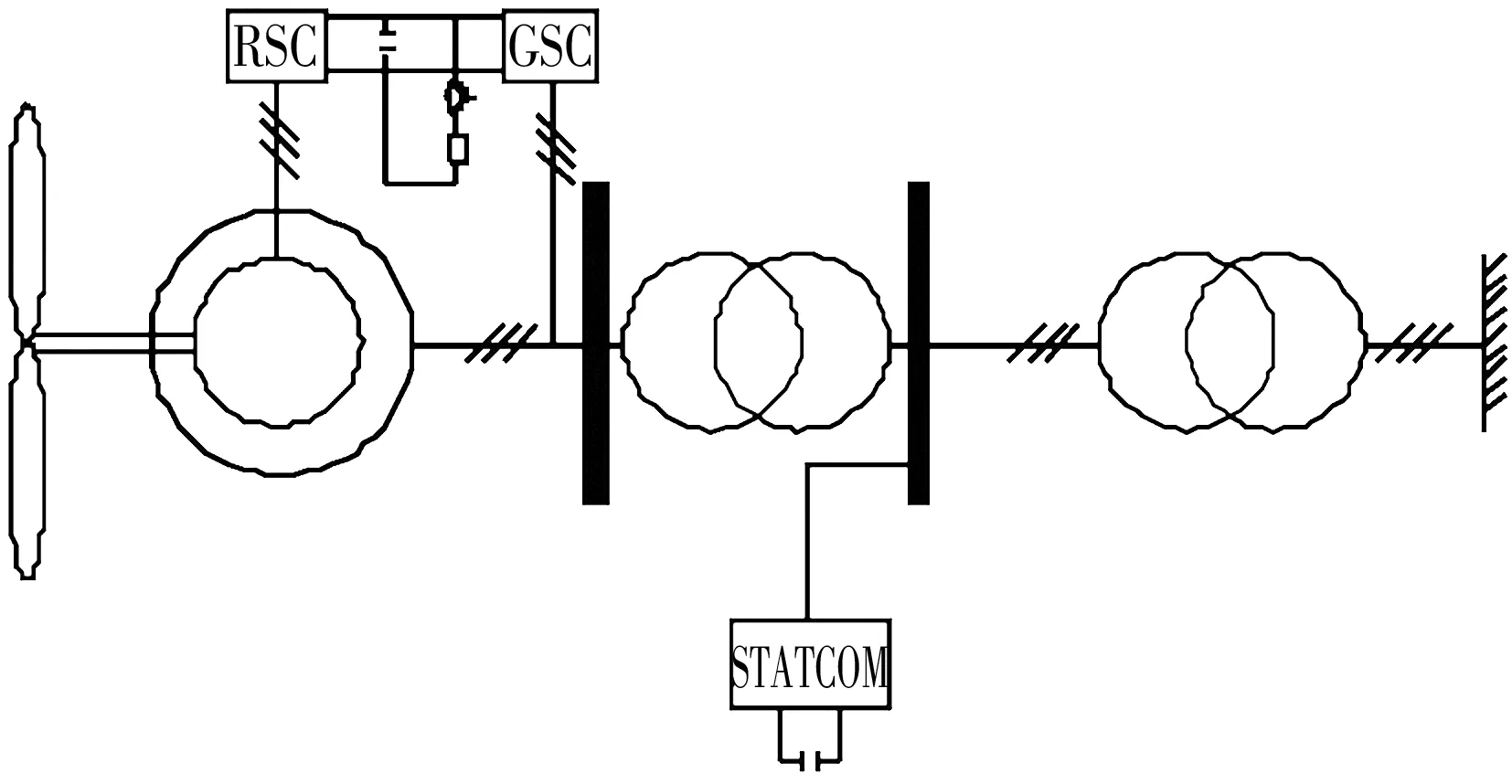
图10 双馈机组机侧、网侧联合控制的高压穿越硬件结构
3 结语
上文对低、高压穿越技术进行了详尽的介绍,并且根据双馈机组的情况选择出相应的办法解决低、高压穿越问题。通过前文分析,无论低压穿越还是高压穿越,都不希望双馈机组在故障穿越过程中出现不可控的时间,为此,最佳的控制方案是确保转子侧Crowe-bar保护电路和直流侧Chopper电路在穿越过程中不动作或尽可能地减少投入时间。因此,在今后的研究中,应重点研究一种控制算法,以满足新提出来的硬件结构,来保证在故障穿越过程中,缩短保护电路投入时间或者不会触发双馈机组的保护电路。
[1] 张兴,曲庭余.对称电网电压骤升下双馈电机暂态分析[J].电源学报,2013(2):40-45.
[2] 邹和平.变速恒频双馈风力发电系统故障穿越技术研究[D].大连:大连理工大学.2013.
[3] 何仰赞,温增银.电力系统分析[M].武汉:华中科技大学出版社,2002:95-97.
[4] 程孟增.双馈风力发电系统低电压穿越关键技术研究[D].上海:上海交通大学,2012.
[5] 徐斯锐.双馈风力发电变流器控制策略及低/高电压穿越技术研究[D].上海:上海电机学院,2016.
[6] 胡兰青,孙丽玲.定子匝间短路故障下双馈风力发电机组高压穿越性能研究[J].电机与控制应用,2017,44(5):108-115.
[7] 周双喜,鲁宗相.风力发电与电力系统[M].北京:中国电力出版社,2011:365-371.
[8] 李少林,王伟胜,王瑞明,等.双馈风电机组高电压穿越控制策略与试验[J].电力系统自动化,2016,40(16):76-82.
[9] 叶盛峰.风力机控制与电力系统继电保护[D].乌鲁木齐:新疆大学,2016:1-63.
