非自治动力系统中的平均跟踪
2018-01-19吴红英
易 鹏, 吴红英
1 引言与预备知识
就我们所知,对于非自治动力系统的研究,始于20世纪60年代,起步比较晚,其理论也不像自治动力系统那么完善和丰富.近年来,许多自治动力系统的性质被放在非自治动力系统的框架内研究.在文献[1]中,作者研究了非自治动力系统中弱混合和混沌性质.在文献[5-7]中,作者研究了非自治动力系统中混沌性质.在文献[3]中,作者定义和研究了非自治动力系统中的扩张,跟踪和拓扑稳定性质.本文研究非自治的半离散动力系统的跟踪性质.我们用Z+表示非负整数.下面给出本文所涉及的一些概念,有关概念可参见文[1-9]等.设(X,ρ)是一个度量空间.对每一个n∈Z+,令 fn∶X→X 是一个连续映射,其中 f0=id(x).我们称F={fn}∞n=0是X上的一个时间变化的映射簇.称(X,F)是一个时间变化非自治的半离散动力系统(或者简称动力系统).对每一个 n∈Z+,我们记 Fn=fn·fn-1·…·f0.
设 A⊂X.用 A 表示|A|的基数;用 d(A)表示 A 的密度,用d(A)表示A的上密度,d(A)表示A的下密度.设(X,F)是一个动力系统,其 δ>0 中 F=.给定,称X中序列是F的一条δ-伪轨,如果对任意 n∈Z+,有

设 x=x0,x1,x2,…,xn=y 为 X 中的有限序列,如果对每一个i∈{0,1,…,n-1},有ρ(fi+1(xi),xi+1)<δ,则称x0,x1,x2,…,xn是一条从 x到 y长度为 n 的 F 的 δ- 链(δ-伪轨可以看做无限长的δ-链).如果对任意的x,y∈X,δ>0,存在一条从x到y的F的δ-链,则称F是链传递的.
本文主要结果为:若(X,F)和(Y,G)具有平均跟踪性质,则(X×Y,F×G)具有平均跟踪性质(见定理2.4);系统(X,F)有平均跟踪性质当且仅当对任何q∈[0,1),(X,F)有 q- 平均跟踪性质(见定理 3.2);具有0-平均跟踪性质的系统(X,F)是链传递的(见定理 3.5).
2 平均跟踪
接下来我们给出平均跟踪性质在非自治系统上的定义.
定义2.1 设(X,F)是一个动力系统.称X中的一个序列是F的一条δ-平均伪轨,是指存在一个正整数N,使得对任意的n≥N和任意的k∈Z+,都有
定义2.2 设(X,F)是一个动力系统.称映射F(或系统(X,F))有平均跟踪性质,是指对任意的ε>0,存在一个δ>0,使得对F的每一条δ-平均伪轨ξ=这时,也称点z,ε-平均跟踪ξ.
下面的引理来自于文献[9].
引理2.3 令ck是非负的实数列.给定正整数t,令 Ct,n是{k<n:ck≥t}的基数,即 Ct,n=|{k<n:ck≥t}|.
(2)若 ck是以 D为界且
定理 2.4 设(X,F)和(Y,G)是两个动力系统,其中(X,ρ1)和(Y,ρ2)为两个度量空间,F={fn}∞n=0和G=分别是(X,ρ1)和(Y,ρ2)上的一个时间变化的映射簇.若F和G都有平均跟踪性质,则F×G也有平均跟踪性质.
证明 由于ρ1和ρ2分别是X和Y上的度量.取X×Y 上度量为:ρ,对任意 x=(x1,y1),y=(x2,y2)∈X×Y,ρ(x,y)=max{ρ(1x1,x2),ρ(2y1,y2)}.令D=max{ρ(x,y),x,y∈X×Y}和
由于F和G具有平均跟踪性质.对σ>0,存在δ>0,使得对每一条F的δ-平均伪轨和每一条G的δ-平均伪轨,分别存在X中的点和Y中的点σ-平均跟踪之.设是X×Y的一条δ-平均伪轨,易知分别是F和G的一条δ-平均伪轨,因此存在点u∈X和v~∈X,使得
记 ck=ρ1(Fk(u),xk),dk=ρ2(Gk(v),yk),mk=max{ck,dk},Ct,n=|{k<n∶ck≥t}|,Dt,n=|{k<n∶dk≥t}|,
Mt,n=|{k<n∶mk≥t}|.
易知 Mt,n≤Ct,n+Dt,n.
由引理 2.3(1),知
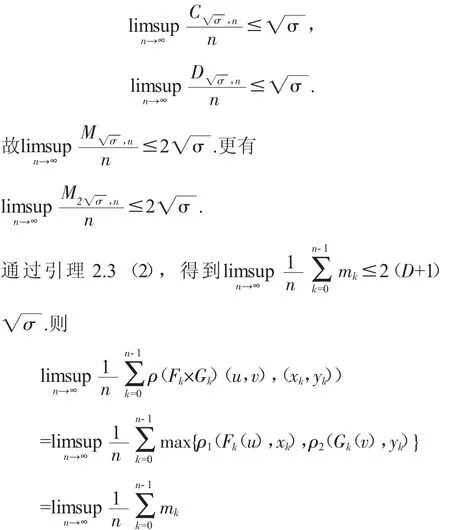
<ε
因此F×G具有平均跟踪性质.
3 q-平均跟踪
定义 3.1 设(X,F)是一个动力系统.q∈[0,1).称映射F(或系统(X,F))具有q-平均跟踪性质,是指对任意的ε>0,存在一个δ>0,使得对F的每一条δ-平均伪轨,存在点 z∈X,满足

这时,也称点z,ε-q-平均跟踪ξ.
定理3.2 设(X,F)是一个动力系统.则下列条件等价:
(1)F具有平均跟踪性质;
(2)对任何的q∈[0,1),F具有q-平均跟踪性质.
证明 (1)⇒(2).取定 q∈[0,1).对任意 ε>0,令γ=(1-q)ε.由 F 具有平均跟踪性质,故存在 δ>0,对 F的任意一条δ-平均伪轨,存在点 z∈X,γ- 平均跟踪之.令A={i∈Z+∶ρ(F(iz),x)i<ε}.则有
又 γ=(1-q)ε,从而 d(A)>q.于是 F 具有 q- 平均跟踪性质.
(2)⇒(1).不失一般性,设 diamX=1.任意取定ε∈(0,1),取.由于F具有q-平均跟踪性质,则存在η>0,对F的每一条η-平均伪轨ξ=,存在点-平均跟踪之.令
令 En=E∩{0,1,…,n-1},故
<ε
于是具有平均跟踪性质.
定理3.3 设(X,F)是一个动力系统,其中F是一个时间变化的映射簇.则下列条件等价:
(1)F具有平均跟踪性质.
(2)对任意的 ε>0,存在 δ>0,对F的每一条 δ-平均伪轨,存在点z∈X,满足
证明 (1)⇒(2).由于F有平均跟踪性质,则对任意的ε>0,存在δ>0,使得对F的每一条δ-平均伪轨,能够被点 z∈X,ε2- 平均跟踪之.即
令E={i∈Z+∶ρ(Fi(z),xi)≥ε},则有
故 d(E)<ε,所以(2)成立.
(2)⇒(1).不失一般性,我们设 diamX=1.根据(2),对>0,存在 δ>0,对F的每一条 δ-平均伪轨,存在点 z∈X,满足
<ε
故(1)成立.
引理 3.4 设 E,F⊂Z+.若 d(E)=1 且 d(F)>0,则d(E∩F)>0.
证明 不失一般性,我们假定diamX=1.任取ε>0,和任取 x,y∈X.设 δ>0和 ε>0满足 0-平均跟踪性质的定义的两个参数.令n0≥2,并且满足<δ.对任意的 i∈N,令 ni=i!·n0.
下面我们定义一组序列:
…
因此,ξ是F的一条δ-平均伪轨.于是存在点z∈X,使得
d({i∈Z+∶ρ(Fi(z),xi)<ε})>0.
令 M1=[0,n1]∪[n2+1,n3]∪[n4+1,n5]∪…=[0,n1]∪[n2k+1,n2k+1].d(M1)=1,令 M2=Z+M1,则 d(M2)=1.
令E={i∈Z+∶ρ(Fi(z),xi)<ε}.由于F有0-跟踪性质.故d(E)>0,则d(E∩M1)>0,d(E∩M2)>0.(由引理3.4)
我们能够找到正整数 r∈E∩M1,s∈E∩M2,并且r<s-1,使得下面的式子成立
[1]F.Balibrea,P.Oprocha.Weak mixing and chaos in nonautonomous discrete systems[J].Applied Mathematics Letters,2012(25):1135-1141.
[2]David Richeson,Jim Wiseman.Chain recurrence rates and topological entropy[J].Topology and its Applications,2008(156):251-261.
[3]Dhaval Thakkar,Ruchi Das.Topological stability of a sequence of mapson a compact metric space[J].Bull.Math.Sci,2014(4):99-111.
[4]S.Kolyada,L'.Snoha.Topological entropy of nonautonomous dynamical systems[J].Random and Computational Dynamics,1996(4):205-233.
[5]Qiuling Huang,Yuming Shi,Lijuan zhang.Sensitivity of nonautonomous discrete dynamical systems[J].Applied Mathematics Letters,2015(39):31-34.
[6]Y.Shi,G.Chen.Chaos of time-varying discrete dynamical systems[J].Journal of Diference Equations and Applications,2009(15):429-449.
[7]X.Wu and P.Zhu.Chaos in a class of non-autonomous discrete systems[J].Applied Mathematics Letters,2013(26):431-436.
[8]Yingxuan Niu.The average-shadowing property and strong ergodicity[J].Journal of Mathematical Analysis and Applications,2011(376):528-534.
[9]Wang H Y,Zeng P.Partial shadowing of average-pseudo-orbits(in Chinese)[J].Sci Sin Math,2016(46):781-792.
