永磁悬浮回转驱动系统的磁场分析
2018-01-19赵智宇徐方超
陈 涛,赵智宇,李 东,徐方超,孙 凤,韦 伟
(1.沈阳工业大学 机械工程学院,辽宁 沈阳 110142;2.沈阳机床(集团)有限责任公司,辽宁 沈阳 110142;3.中国华录 松下电子信息有限公司,辽宁 大连 116023)
0 前言
磁悬浮技术已广泛应用于工业自动化和现代家电等国民经济的各个领域[1-3]。随着永磁与电磁软件[4-6]在磁悬浮技术中的不断应用,虚拟磁场技术不仅提高了磁悬浮系统磁场的仿真精度,对磁场特性的研究也提出了更高的要求。为了使磁悬浮技术达到稳定、精确的工作状态,通过运用可靠、准确和实用的仿真计算分析,可以节省大量的时间和成本。目前,计算机技术的快速发展,对整个磁场的仿真分析方法已经成功运用于磁悬浮系统、磁饱和表面效应的旋转电机以及磁悬浮列车等[7-11]。
本文针对一种永磁悬浮回转驱动系统进行磁场分析,介绍系统的总体结构以及非接触回转驱动原理,建立系统二维仿真模型,并在此模型的基础上进一步分析永磁体的回转磁场特性以及铁球的表面磁通密度分析,得出仿真结果并对其进行分析。
1 永磁悬浮回转驱动系统的结构
永磁悬浮回转驱动系统是由悬浮部分和非接触回转驱动部分构成,如图1所示。
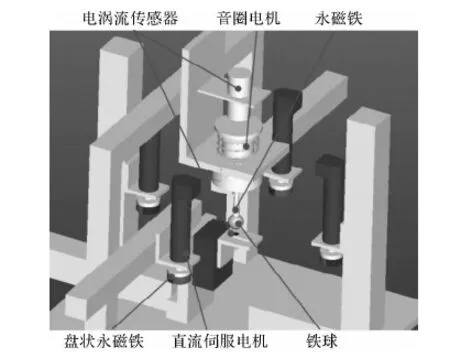
图1 系统的结构图
1.1 悬浮部分
悬浮部分的结构如图2所示。
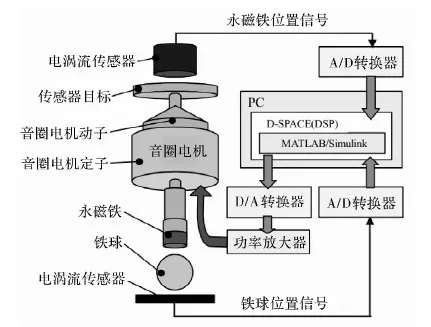
图2 悬浮部分结构图
悬浮部分包括柱形永磁铁、音圈电机和两个电涡流传感器。柱形永磁铁安装在音圈电机的输出轴上,音圈电机驱动柱形永磁铁在竖直方向上移动,永磁铁的位移由音圈电机上方的电涡流传感器测量,铁球的悬浮位移由铁球下方的电涡流传感器测量。永磁铁的位移信号和铁球的旋转角度信号经过A/D转换器转换后,输入给PC机,通过dSPACE控制器和PD控制方法来控制整个系统,再由D/A转换器转换,经过功率放大器控制音圈电机的上下伸缩,以确保铁球的稳定悬浮。
1.2 非接触回转驱动部分
非接触回转驱动部分的结构如图3所示。非接触回转驱动部分包括四个同规格的径向磁化盘状永久磁铁和四个直流伺服电机以及编码器。每个盘状永磁铁安装在直流伺服电机的输出轴上,与悬浮球的水平距离相同,以控制每个盘状永磁铁的回转。四个永磁铁的回转可驱动铁球的回转,铁球的回转角度由激光传感器测量。电机安装在系统的框架上,由电机驱动永磁铁实现永磁铁在竖直方向上和水平方向上的移动和转动。永磁铁的旋转角度由电机编码器记录,通过编码器接口将信号反馈到dSPACE控制器,再由D/A转换器转换,信号经过功率放大器以及用PD控制方法来控制电机的旋转角度,实现四个永磁铁与铁球在同一水平面上,并以相同的旋转速度进行旋转。
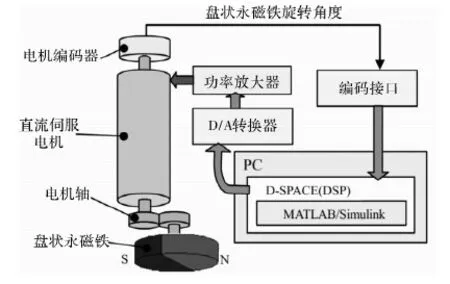
图3 回转驱动部分结构图
2 非接触回转驱动原理
永磁悬浮回转驱动系统的旋转原理图如图4所示,铁球位于四个盘状永磁铁的中心。在垂直方向上,由于音圈电机驱动柱形永磁铁吸引铁球,使铁球在垂直方向上移动;在水平方向上,四个盘状永磁铁与铁球位于同一平面内,与铁球距离相等。每个径向磁化的永磁铁,其磁极平行布置,且同级相对。在运动过程中,四个盘状永磁铁均以同一速度向同一方向进行旋转。
铁球表面上磁点S的位置决定铁球的旋转角度,当四个盘状永磁铁同向旋转时(如图4箭头方向所示),铁球绕其纵轴逆时针旋转,永磁铁Ⅰ吸引磁点S,S点向永磁铁Ⅰ方向转动,当S点距离永磁铁Ⅰ最近时铁球停止旋转。此时,磁点S正对于磁铁Ⅰ,铁球旋转90°,四个永磁铁也旋转90°。当永磁铁继续旋转时,永磁铁Ⅳ吸引磁点S,S点朝向永磁体Ⅳ方向转动。由此表明,四个盘状永磁铁的旋转,磁感线的变化使得铁球以反方向、同速度进行自转。
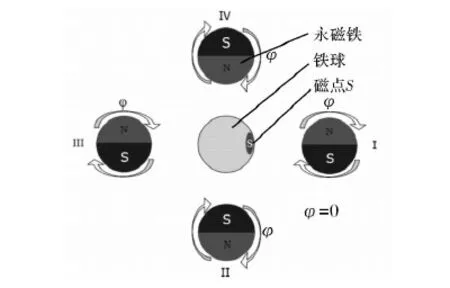
图4 旋转原理图
3 回转磁场特性分析
为了探究永磁悬浮回转驱动系统在水平面内的磁场,使用ELF/Magic软件分析其磁铁布置方式下的二维模型。在模型中,铁球和磁铁的直径为30 mm,铁球与永磁铁的中心之间的距离是40 mm。铁球和永磁铁的磁场分布形状是圆形,且磁场的直径是120 mm。铁球的材料为铁,磁铁的材料为铷铁硼。
图5 永磁悬浮回转驱动系统的二维模型
假设永磁体的旋转角度为φ,当情况如图5所示时,φ等于0°。在永磁悬浮回转驱动系统的基础上,建立具有四个永磁体驱动铁球旋转的分析模型,如图6所示,其中中间的小圆为铁球,四周小圆为永磁铁,整个圆表示所在磁场,箭头表示磁通量的方向,并且箭头的稀疏密表示磁密度的强弱。
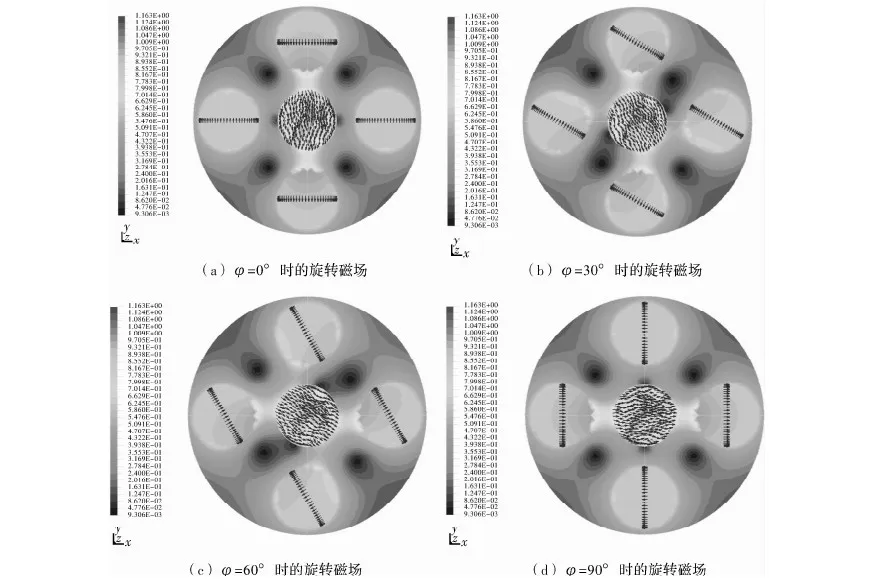
图6 四个永磁铁作为驱动磁铁时的磁场分析结果
磁体从0°旋转到90°时的分析结果如图6a~6d所示。仿真结果表明:当磁体旋转时,铁球表面以及周围的强磁密度点变化。如图6a所示,强磁密度点的数量是两个,为铁球表面的上下最高点。磁铁匀速转动至30°时,如图6b所示,强磁密度点的数量也为两个,但其位置发生变化,上侧的强磁密度点向左偏移,下侧的强磁密度点向右偏移,由于磁场的变化,给铁球一个逆时针旋转的力,使铁球逆时针旋转。磁铁匀速转动至60°时,如图6c所示,相比于0°情况,强磁密度点的位置逆时针旋转约60°,四个永磁铁的磁密度强度是相等的,并且永磁铁表面上的强磁密度点的变化角度约等于永磁铁的旋转角度。磁铁转动至90°时,如图6d所示,四个永磁铁旋转所产生的强磁密度点,在铁球的左右两侧,相比于0°时强磁密度点的位置,已旋转约90°。因此,当使用四个永磁铁作为驱动磁体时,铁球在四个永磁铁的变化磁场内,永磁铁旋转引起附近磁场的变化,铁球受到磁场变化的影响,会以自转的形式逆时针旋转。
4 结束语
本文针对一种永磁悬浮回转驱动系统进行磁场分析,该系统由音圈电机驱动盘状永磁铁以控制悬浮物的上下移动、由四个直流伺服电机控制四个盘状永磁铁的旋转来实现悬浮物的回转。为了探究永磁悬浮回转驱动系统在水平面内的磁场,通过磁场仿真分析研究四个永磁铁与铁球之间的磁场关系。研究结果表明:使用四个永磁铁作为铁球的驱动磁体时,铁球在四个永磁铁的变化磁场中心,永磁铁旋转引起附近磁场的变化,铁球受到磁场变化的影响,会以自转的形式逆时针旋转,四个永磁铁匀速转动一定角度,铁球所旋转的角度与永磁铁的角度大致相等,且方向相反。
[1] 莫双鑫,刘少克.中低速磁悬浮列车空气阻力计算[J].机车电传动,2015,4:49-52.
[2] 于慎波,鲍萌.永磁同步电主轴定子齿形状对转矩脉动的影响分析.重型机械,2016,3:28-32.
[3] 张钢,孟庆涛,钟永彦,等.五自由度全永磁轴承系统的稳定悬浮特性分析[J].机械工程学报,2015,(51)5:56-63.
[4] 郝丽.基于Ansoft 的电磁场实验仿真软件研发[J].实验技术与管理,2013,30(9):104-106.
[5] 卢东方,王毓华,何平波,等.基于ANSYS的履带式永磁磁选机磁场模拟[J].中国有色金属学报,2014,24(8):2188-2194.
[6] 尚玲艳,周坚刚.基于MATLAB的钢板磁悬浮系统仿真研究[J].系统仿真学报,2006,18(s2):982-984.
[7] 秦新燕,肖鹏程.基于Ansoft的电机设计及瞬态分析[J].湖北第二师范学院学报,2011,28(2):89-92.
[8] 洪华杰,李杰,李淑娟.基于虚拟样机的磁悬浮列车运动学仿真分析[J].机车电传动,2005,(2):40-44.
[9] H Dindo,D Zambuto,G Pezzulo.Motor simulation via coupled internal models using sequential Monte Carlo[J].International Joint Conference on Ijcai,2011:2113-2119.
[10] 舒光伟,Reinhold Meisinger.基于Simulink的磁悬浮控制系统仿真[J].系统仿真学报,2008,20(8):2168-2176.
[11] 王扬彬,徐兵,刘英杰.基于Ansoft及AMEsim的电磁铁动态特性仿真分析[J].机床与液压,2008,36(9):104-108.