基于模糊自适应控制的三相PWM整流器的研究
2018-01-18杨肖方纪村刘传亮
杨肖+方纪村+刘传亮
摘 要:三相电压型 PWM 整流器一般采用传统双闭环PI控制策略,而PI控制参数是在特定条件下整定的,在负载变化和扰动较大的情况下系统适应性差,难以取得良好的控制效果。结合自适应的控制思想,在PI控制的基础上,提出了一种新型的控制方法,即在电压外环采用模糊自适应PI控制,电流内环采用前馈解耦的控制策略。仿真结果表明这种控制方法适应性强,具有良好的动态性能。
关键词:PWM整流器;模糊自适应;负载扰动
中图分类号:TM461 文献标志码:A
Research on Three-phase PWM Rectifier Based on
Fuzzy Adaptive Control
YANG Xiao,FANG Ji-cun,LIU Chuan-liang
(Jiangsu Automation Research Institute,Lianyungang, Jiangsu 222000,China)
Abstract:As the three-phase voltage-type PWM rectifier (VSR) using traditional PI control strategy is difficult to obtain good control effect in the case of large disturbance and load a broad range of mutations.Basis on the traditional double closed-loop PI control strategy,combined with adaptive control ideas,a new control method is proposed in this paper,which is that PI control and fuzzy control will be applied to outer loop control of the voltage,and the inner loop current control use feed forward decoupling control strategy.The simulation results show that the control method is fast response and strong adaptability, and has good dynamic and static characteristics.
Key words:PWM rectifier;fuzzy adaptive;load disturbance
1 引 言
随着电子技术的飞速发展,PWM整流电路由于功率因数高,谐波含量低等优点已经逐渐取代传统的不控整流电路,如二极管整流和晶闸管整流电路[1]。而具有输入电流连续,输出电压稳定可控,可单位功率因数运行等优点的三相PWM整流器更是近来研究的热点[2]。一般而言,整流器想要获得良好的性能,对其采取合适的控制才是关键所在。三相PWM整流器一般采用传统的双闭环PI控制器,而PI参数是在特定条件下整定的[3-5],在负载大范围变动或者扰动较大时控制精度不高,系统特性变差。还有学者将基于反馈线性化的极点配置方法应用于双闭环控制器中[6],也取得了较好的效果,但系统参数发生变化时,PID参数不能适应这些变化,使得系统的性能变差。文献[7]采用基于零极点配置状态反馈的无差拍控制方法,文献[8]采用电压外环,功率内环的控制的控制策略,并在内环采用滑模变功率控制,上述所提的控制策略都能在不同程度上改善整流器的性能,但是在参数发生变化时,这些方法的性能都会变差,文献[9]采用模型预测控制方法设计的控制器,但在预测模型的参数不确定时,系统性能也将变差。
在分析三相PWM整流器的拓扑结构的基础上,提出了一种新型的控制策略,结合传统PI控制和模糊自适应控制各自的优点,应用于电压外环控制中,电流内环则采用前馈线性解耦控制。考虑到整流器运行过程中负载等电路参数会随运行情况变化而变化,这种控制策略能根据系统的运行状态实时的调整控制参数,不仅能提高直流侧的电压精度以及抗扰动能力,而且在负载变化时,具有更好的适应性。
2 三相PWM整流器拓扑结构及数学模型
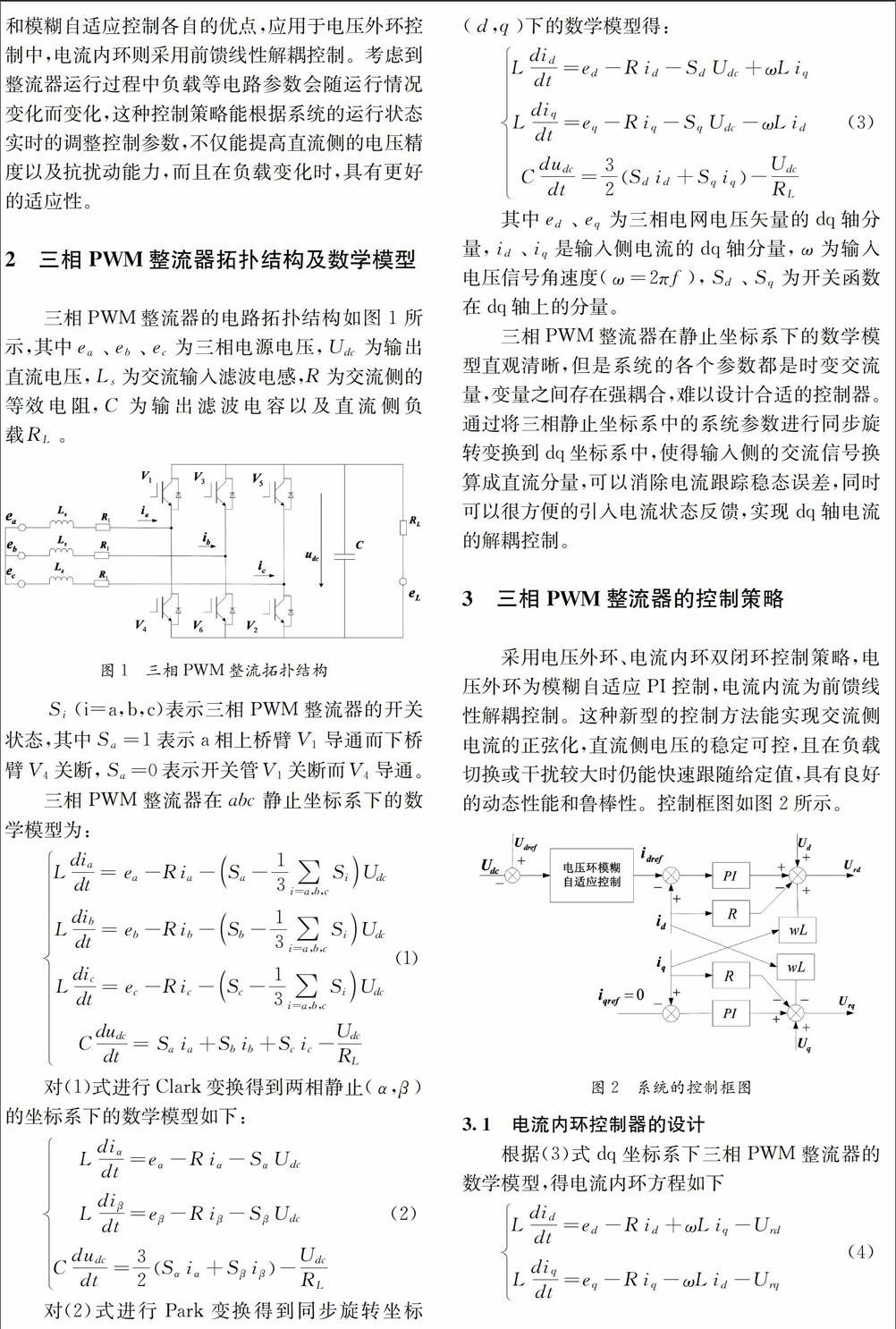
三相PWM整流器的电路拓扑结构如图1所示,其中ea、eb、ec为三相电源电压,Udc为输出直流电压,Ls为交流输入滤波电感,R为交流侧的等效电阻,C为输出滤波电容以及直流侧负载RL。
Si(i=a,b,c)表示三相PWM整流器的开关状态,其中Sa=1表示a相上桥臂V1导通而下桥臂V4关断,Sa=0表示开关管V1关断而V4导通。
三相PWM整流器在abc静止坐标系下的数学模型为:
Ldiadt=ea-Ria-Sa-13∑i=a,b,cSiUdcLdibdt=eb-Rib-Sb-13∑i=a,b,cSiUdcLdicdt=ec-Ric-Sc-13∑i=a,b,cSiUdcCdudcdt=Saia+Sbib+Scic-UdcRL(1)
對(1)式进行Clark变换得到两相静止(α,β)的坐标系下的数学模型如下:
Ldiαdt=eα-Riα-SαUdcLdiβdt=eβ-Riβ-SβUdcCdudcdt=32Sαiα+Sβiβ-UdcRL(2)
对(2)式进行Park变换得到同步旋转坐标(d,q)下的数学模型得:
Ldiddt=ed-Rid-SdUdc+ωLiqLdiqdt=eq-Riq-SqUdc-ωLidCdudcdt=32Sdid+Sqiq-UdcRL(3)endprint
其中ed、eq为三相电网电压矢量的dq轴分量,id、iq是输入侧电流的dq轴分量,ω为输入电压信号角速度(ω=2πf),Sd、Sq为开关函数在dq轴上的分量。
三相PWM整流器在静止坐标系下的数学模型直观清晰,但是系统的各个参数都是时变交流量,变量之间存在强耦合,难以设计合适的控制器。通过将三相静止坐标系中的系统参数进行同步旋转变换到dq坐标系中,使得输入侧的交流信号换算成直流分量,可以消除电流跟踪稳态误差,同时可以很方便的引入电流状态反馈,实现dq轴电流的解耦控制。
3 三相PWM整流器的控制策略
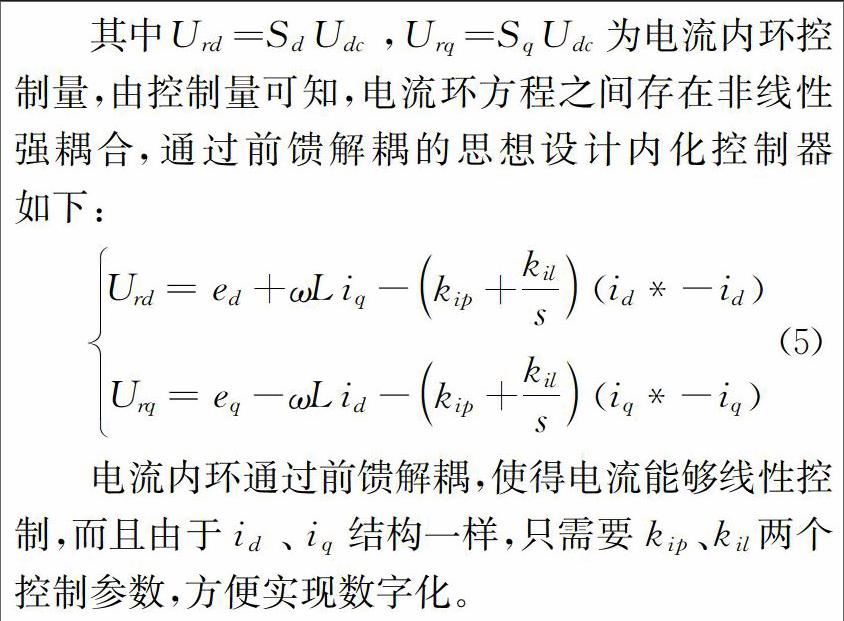
采用电压外环、电流内环双闭环控制策略,电压外环为模糊自适应PI控制,电流内流为前馈线性解耦控制。这种新型的控制方法能实现交流侧电流的正弦化,直流侧电压的稳定可控,且在负载切换或干扰较大时仍能快速跟随给定值,具有良好的动态性能和鲁棒性。控制框图如图2所示。
3.1 电流内环控制器的设计
根据(3)式dq坐标系下三相PWM整流器的数学模型,得电流内环方程如下
Ldiddt=ed-Rid+ωLiq-UrdLdiqdt=eq-Riq-ωLid-Urq(4)
其中Urd=SdUdc,Urq=SqUdc为电流内环控制量,由控制量可知,电流环方程之间存在非线性强耦合,通过前馈解耦的思想设计内化控制器如下:
Urd=ed+ωLiq-kip+kilsid*-idUrq=eq-ωLid-kip+kilsiq*-iq(5)
電流内环通过前馈解耦,使得电流能够线性控制,而且由于id、iq结构一样,只需要kip、kil两个控制参数,方便实现数字化。
3.2 电压外环控制策略设计
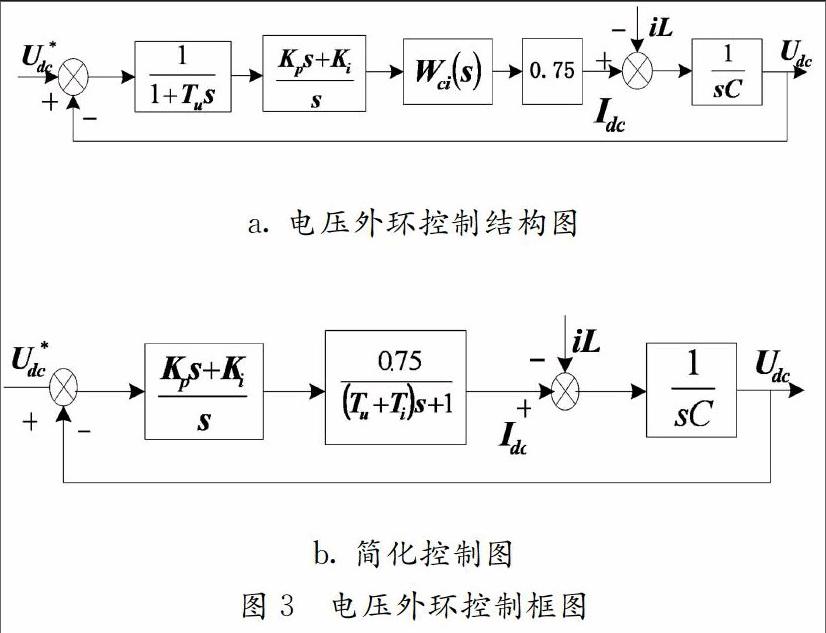
图3a给出了三相电压型PWM整流器的外环控制框图。在进行外环控制参数设计时,由于内环响应快,假设电流已经跟随给定值,其中Wci(s)为电流内环简化传递函数,其简化模型等效为一个惯性环节,即Wcis=1/(Tis+1),Ti为电流内环调节时间。电压采样时间为Tu,Kp、Ki是电压外环控制器的控制参数,Idc为直流侧的电流,IL为负载扰动。对电压外环进行高频小惯性环节近似处理后得到简化的控制框图如图3b所示。
由于电压外环的主要作用是稳定直流侧的电压,使其快速跟随给定值,所以外环参数设计时要考虑负载变换的影响。而三相PWM整流装置在运行过程中,负载等电路参数会随运行情况而变化,为了适应这种变化,外环控制设计采用模糊自适应控制,能够根据负载电流的需要实时调整系统的控制参数,以提高直流侧控制电压的精度,获得良好的动态性能。
3.3 模糊自适应PI控制原理
模糊自适应PI 控制器的原理是通过设计的模糊规则实时的修改PI控制参数,结构如图4所示,以外环电压的误差e和误差变化率ec作为模糊控制器的输入,应用模糊规则对PI参数进行调整,实现外环电压的快速跟随及稳定可控。
模糊自适应控制的实现过程是,找出P、I两个参数与误差e和误差变化率ec之间的模糊关系,其中kp的作用是加快系统的响应速度,提高系统的调节精度,ki的作用是消除系统的稳态误差,在运行过程中不断检测e和ec,根据模糊控制原理对PI参数进行在线修改,而使被控对象有良好的动静态性能。计算当前的误差e和ec,进行模糊化处理,将输入变量从基本论域中转换到对应的语音变量模糊集论域中,利用模糊规则进行模糊推理。将系统误差e和误差变化率ec定义为模糊集上的论域e,ec=-3,-2,-1,0,1,2,3,其语言变量集为e,ec={NB,NM,NS,ZO,PS,PM,PB},子集中的元素分别表示为负大,负中,负小,零,正小,正中,正大。为方便计算,他们的隶属度函数均为三角形函数。选取控制量的原则是:当误差大或较大时,控制参数设计以尽快消除误差为主;当误差较小时,参数设计要以系统的稳定性为主,防止系统超调。按照上述分析建立模糊控制器的控制规则,如表1,表2所示。
针对不同的输入情况,根据模糊规则表推理输出结果Δkp、Δki,然后与初始PI参数相加,完成对PI参数的在线自校正。
kp=kp0+Δkpki=ki0+Δki(6)
式中,kp、ki为调整后的输出参数,kp0、ki0是按照工程方法整定的初始参数,Δkp、Δki是模糊规则控制的调整参数。
4 仿真结果分析
根据以上分析,运用matlab/simulink模块搭建了整个系统的仿真模型,系统仿真结构模型如图5所示,主要由主电路结构(图中的上部分),电压电流坐标变换电路(3R/2S模块),电压/电流双闭环调节电路(fuzzy adaptive control 模块 ),SVPWM电路构成。
其中仿真所用的参数如下:三相输入电压有效值220 V,交流侧输入滤波电感L=4 mH,电感等效电阻Rs=0.5 Ω,直流侧滤波电容C=2 200 uF,开关频率为10 kHz,三相输输入电源频率为50 Hz,输出直流电压Udc=650 V,额定功率10 kW。
为验证所选控制方案的性能,将模糊自适应控制与一般的PI控制进行比较研究,对仿真结果分析如下。
图6(a)是传统PI控制策略的直流侧电压启动波形,(b)是模糊自适应控制的启动波形。传统的双闭环PI控制也能达到一定的效果,直流侧电压在0.2 s左右达到稳态值650 V,启动时有超调(约15 V)。相比较而言,本文采取的新型控制策略,输出侧直流电压响应更快,在0.15 s处达到稳态值,而且没有超调。
为进一步验证本文电压环自适应控制方法快速适应负载变化的能力,在0.35 s处负载由半载切换到满载的仿真图形如图7所示。在相同负载变化下,模糊自适应PI控制的恢复时间更快,动态效果更好,相比于传统PI控制,恢复时间减少35%,而且输出电压的最大偏差也减少50%。endprint
5 结束语
由于三相PWM整流器负载是随运行情况而变化的,为了适应这种负载大范围突变,本文提出电压外环采用模糊自适应控制,电流内环线性解耦的双闭环控制策略,可很大程度上改善整流器的动态性能,提高直流侧输出电压的控制精度。与传统PI调节相比,输出电压波动小,响应更快,鲁棒性更好。
参考文献
[1] 郭鑫,任海鹏.三相PWM变换器的负载自适应控制[J].电子学报,2015, 43(10):2088-2094.
[2] 徐德鸿.现代整流器技术-有源功率因数校正技术[M].北京:机械工业出版社, 2013.
[3] 汪万伟,尹华杰,管霖.双闭环矢量控制的电压型PWM整流器参数整定[J].电工技术学报,2010,25(2):67-72.
[4] BAHRANI B,KENZELMENN S, RUFER A.Multi-variable-PI-based dq current control of voltage source converters with superior axisdecoupling capacity[J].IEEE Transactions on Industrial Electronics,2011,58(7): 3016-3025.
[5] 邓卫华,张波,丘东元,等.三相电壓型PWM整流器状态反馈精确线性化解耦控制研究[J].中国电机工程学报,2005, 25(7): 93-103.
[6] BAO X W, ZHOU F,TIAN Y, et al.Simplified feedback linearization control of three-phase photovoltitaic inverter with an LCL filter[J].IEEE Transactionson Power Electronics,2013,28(6): 2739-2752.
[7] KIM J H, JOU S T, CHOI D K,et al.Direct power control of three-phase Boost rectifier by using a sliding-mode scheme[J].Journal of Power Electronic, 2013,13(6):1000-1007
[8] ZHANG X G,ZHANG W J,CHEN J M.Deadbeat control strategy of circulating current in parallel connection system of three-phase PWM converter[J].IEEE Transactions on Energy Conversion,2014(1):1-12.
[9] 宋战锋,夏长亮,谷鑫.静止坐标系下基于最优时间序列的电压型PWM整流器电流预测控制[J].电工技术学报,2013,28(3):234-240.endprint
