雷沃ZP9500高地隙喷雾机的GNSS自动导航作业系统设计
2018-01-18刘兆朋张智刚罗锡文黄培奎
刘兆朋,张智刚※,罗锡文,王 辉,黄培奎,张 健,2
(1. 华南农业大学南方农业机械与装备关键技术省部共建教育部重点实验室,广州 510642;2. 青岛农业大学机电工程学院,青岛 266109)
0 引 言
农机装备的自主导航作业已成为国内外农机发展的必然趋势,基于RTK-GNSS技术开发的农机自主导航和智能化作业系统已越来越广泛[1-2]。高地隙喷雾机在中国规模化农田的药肥喷施机械中占据重要地位。但因人工驾驶存在的漏喷、重喷难以保障作业质量,且飘散的有毒药物易对驾驶员造成伤害[3-4]。
高地隙喷雾机的自动导航作业系统可分为自动导航控制和自主作业控制2部分。在自动导航控制研究方面,一些学者基于简化二轮车辆模型研究了路径跟踪控制的模糊控制算法、遗传控制算法、状态反馈控制算法及基于纯追踪模型的控制算法等,开发了导航控制系统并通过试验验证,路面试验直线路径跟踪精度小于 5 cm,田间试验路径跟踪精度在5~10 cm[5-12]。为提高导航控制精度,许多学者基于二自由度车辆动力学模型、参数辨识和现代控制理论开展了导航控制器的研究。O’Connor等[13-14]通过离线辨识确定了参数,设计了最优导航控制系统,在1.8 m/s速度下开展了田间试验,直线路径跟踪最大误差为10 cm,曲线路径跟踪误差为60 cm;Erkan等[15]基于非线性最小二乘法实现车辆模型参数的辨识,设计了模糊控制路径跟踪控制器,开发了基于 GNSS的导航控制系统,跟踪误差较大。Han等[16]通过迭代法实现了车辆模型参数估计,设计了基于纯追踪模型的路径跟踪控制器在水田环境2 km/h速度下进行了试验,各行平均误差在5.8~12.5 cm之间。孟庆宽等[17]通过改进粒子群优化算法实现了车辆模型参数的在线辨识,设计了自适应模糊控制器实现路径跟踪,在沥青路面0.8 m/s的速度下,直线路径跟踪偏差4.2 cm、曲线路径跟踪偏差5.9 cm。张万枝[18]等研究了二轮车线性时变模型,基于预测控制理论设计了控制算法,以小型试验车为平台在平整草坪上进行了试验,速度为3 m/s时误差在10 cm左右。
农业机械的自动导航作业系统是在导航控制系统基础上,通过搭载自主作业控制器实现极少人干预情况下的田间作业。Seong等[19]基于 GPS/超声波传感器开发了喷雾机自主导航作业系统,基于超声波检测实现了避障识别并设计了规避路径,基于模糊控制和遗传算法设计了路径跟踪控制器,田间试验表明系统在系统实现了自动避障功能,路径跟踪精度不高。罗锡文等[8]在自主开发的 GPS自动导航拖拉机平台上,通过对拖拉机进行机-电-液改造,设计了拖拉机自动导航作业系统,使拖拉机的启停、速度控制、机具升降、点火及熄火都实现了自动控制。Nagasaka等[20-21]在插秧机自动导航系统的平台上,通过对插秧机机构改造,设计了智能作业控制器,使插秧机能够自动实现车辆启停、地头转弯、速度控制和插秧机构的升降和插秧作业等。Hiroki等[22]在履带式水稻收获机上,通过搭载视觉系统和 GNSS导航定位系统开发了一套可自动完成水稻收获、仓满卸粮、未收获边界的判别和接茬收获等作业的水稻收获机自主导航作业系统,在 0.6、0.8、1 m/s速度下进行田间试验,直线路径跟踪精度<8 cm,自动化程度和导航控制精度高。
以高地隙喷雾机为平台开展自动导航和自主作业系统的研究较少。为实现喷雾机在极少人工干预情况下的田间导航作业,避免人工操作喷雾机作业所造成的药物损害,本研究以雷沃ZP9500高地隙喷杆喷雾机为平台,开展了喷雾机自动导航作业系统的研究。最终在水泥路面、旱田及水田环境中进行了试验,验证了高地隙喷雾机自动导航作业系统的精确性和可靠性。
1 自动导航作业系统结构
自动导航作业系统由雷沃 ZP9500高地隙喷雾机主体、机-电-液装备及机构、导航控制器和无线监控显示屏终端组成,如图1所示。

图1 喷雾机自动导航作业系统Fig.1 Automatic navigation operation system of sprayer
其中,雷沃ZP9500高地隙喷雾机转向形式为四轮逆向转向,车轮大小一致,轮胎为实心胎。离合、喷雾及喷杆升降为电控,油门为踏板机械式调节;喷杆由左、中、右3段组成,各段喷雾可独立控制,性能参数如表1所示。需要说明的是,本平台为该系列产品的首批产品,初定型号为3WP500,设定的作业速度如表1所示的0~5.4 km/h,其升级产品型号为ZP9500,速度为0~10 km/h。
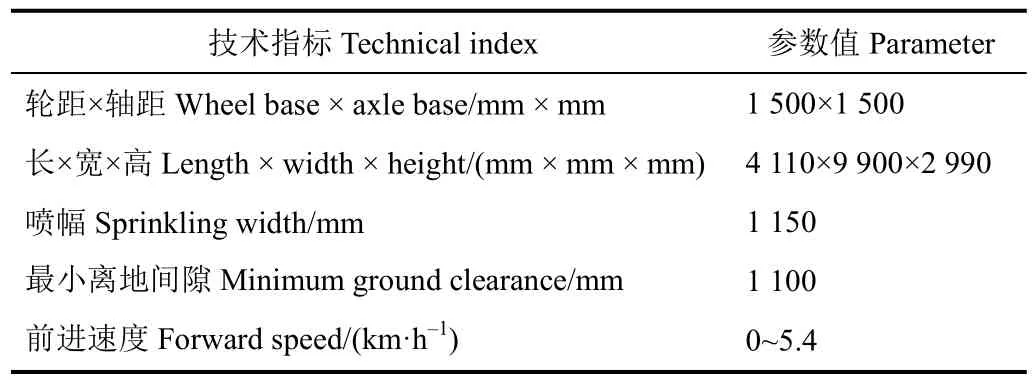
表1 雷沃ZP9500喷雾机主要技术指标参数Table 1 Main technical index of Lovol ZP9500 sprayer
针对喷雾机结构进行了机-电-液改造,并配置了相应传感器。转向系统执行主件采用 EATON-KDG4V型电-液比例换向阀,通过加装液压管路与喷雾机转向油路并联,构成电-液转向控制机构。转向轮偏角检测传感器采用BEI公司的9902120CWHT型霍尔角度传感器,与转向节臂同轴转动。油门控制机构选用力姆泰克LIM3-S2-100型电控推杆电机,通过将伸缩轴轴端与油门踏板机构末端相连接,构成油门调控机构。为实现导航作业控制器对喷雾机的离合、喷雾系统启停及分段控制,对喷雾机电气系统进行了部分改造。
其中,位姿传感器组件选用XSENS公司的 MTi-30惯性传感器和Trimble公司的双天线RTK-GNSS导航定位板卡 BD982,可同时实现对位置信息、航向信息的直接测量,其中定位精度1 cm,航向测量精度0.3°,数据迟延<20 ms。MTi-30提供车身的姿态、加速度及角速度等信息,姿态测量精度为0.3°。
导航控制器是导航控制系统的核心,包括导航信息采集与处理模块、自动导航控制器和控制执行机构。其结构及功能如图2所示。
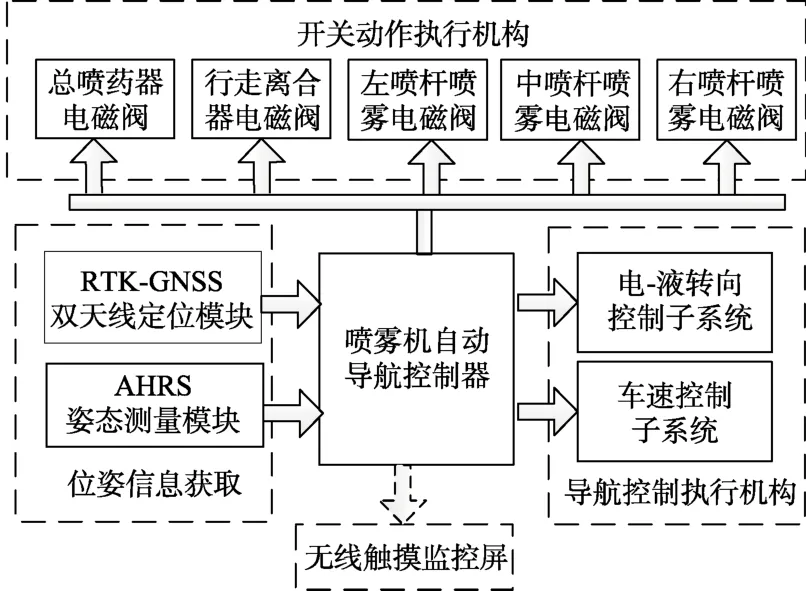
图2 导航控制器功能结构图Fig.2 Function structure chart of navigation controller
2 导航作业控制方法
2.1 作业路径跟踪控制
为引导喷雾机自动完成田间行走,设计了直线路径跟踪控制器和地头转弯控制器,两者之间通过设定的边界阈值实现切换。
2.1.1 直线路径跟踪控制
基于车辆操纵特点和车辆运动过程,车辆运动学和转向控制是导航控制系统研究的重要内容。高地隙喷雾机因重心高、轮胎窄,在田间作业过程中,尤其是水田环境下,由地形起伏造成的车体侧偏极易导致车身产生侧滑并影响导航控制精度,表现为偏航角和位置偏差的扰动。在系统中,因搭载的双卫星天线导航定位系统可实现对偏航角、位置偏差的高精度直接观测,则在本研究中不将车体的侧偏角作为运动状态参量。同时,喷雾机转向形式为四轮逆向转向且轮胎规格一致,小角度转向行驶过程中可假设各轮胎动力学基本对称,车轮转角近似相等,则车轴上的2个车轮可用1个车轮代替[23-26]。基于以上特点,在本研究中将四轮逆向转向车辆模型简化为了二轮车模型,如图3所示。
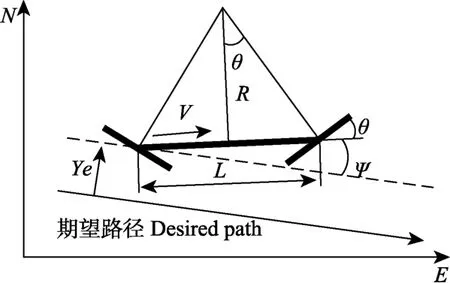
图3 四轮转向喷雾机简化运动学模型Fig.3 Four-wheel steering sprayer simple kinematics model
在车体中心建立车体坐标系,并在导航坐标系下得到喷雾机运动学微分方程描述[23-24],如式(1)~(2)。
式中t为时间,s。
因直线路径跟踪中车轮转角θ为小角度值,故可对方程线性化,得到四轮转向喷雾机运动状态微分方程的标准形式

设计基于全状态反馈的直线路径跟踪控制率

式中k1为偏航角反馈系数,k2为位置偏差反馈系数。
经试验验证,闭环系统极点设为-0.5时路径跟踪性能稳定性好;通过解析系统的特征多项式得到直线路径跟踪的状态反馈控制器为

在实际应用时,对公式(5)参数单位进行了重定义,并将式(5)改写为式(6):用“度”代替“弧度”;车辆位置、航向左偏量值为负;轮角右偏量值为负。

式中δ为决策轮角。
因本平台无法直接测量车辆的中心点位置,且车身晃动会造成测量“杆臂效应”[13],基于喷雾机运动学模型,在位置信息获取时将主天线位置投影到车辆中心的地面投影点。
在电-液转向机构中,车轮角度跟随控制具有明显的滞后特性[25-26]。为此针对喷雾机平台,基于喷雾机电-液转向系统特性参数,设计了F-PID车轮角度控制算法,在喷雾机运动状态下通过追踪正弦波信号验证了算法性能。如图4所示,车轮角度跟踪信号幅值1.5°,周期1.5 s,跟随角度曲线相对指令角度曲线呈现稳定的相位滞后,拐点位置无震荡,超调量小。统计跟随延时τ平均值为0.2 s,从而确定了在该控制系统下的车轮角度控制延时特性。
在导航控制系统中,车轮角度控制的延时造成了车辆状态的校正滞后,导致系统稳定性降低,表现为导航航向偏差、位置偏差的增大。在直线路径跟踪下,喷雾机四轮逆向转向机构使前后车轮的运动轨迹具有良好的同辙性,在运动轨迹上可近似为前轮相对后轮存在量值为τ=L/V的相位超前。基于此,本研究将天线投影位置前置,距离为d=Vτ,以补偿车轮角控制的滞后,坐标转换公式如式(7)。该方法在实践应用中取得了成效,提高了控制精度和稳定性。
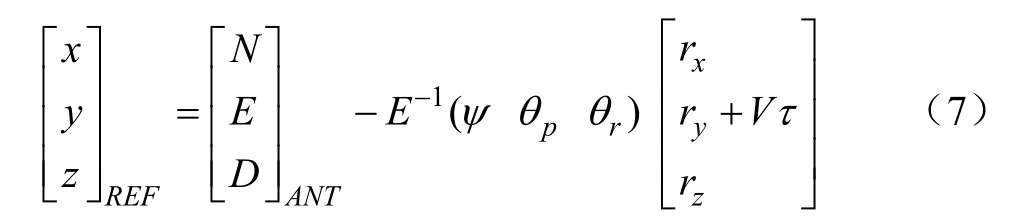
式中N-E-D为主天线坐标,x-y-z为车辆坐标,θp为车辆俯仰角,rad;θr为横滚角,rad;rx-ry-rz为主天线在车体坐标系下的坐标。
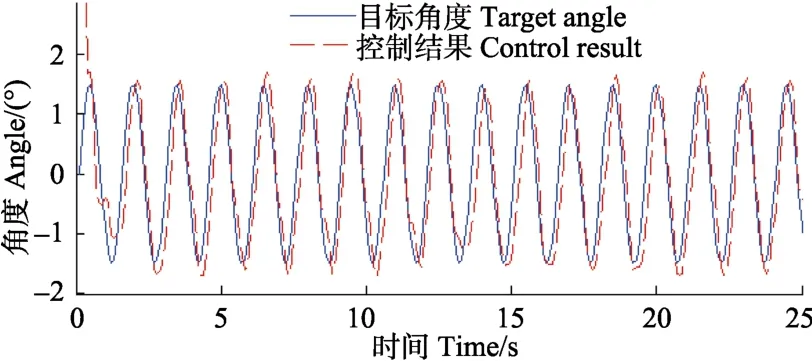
图4 车轮角度跟踪控制Fig.4 Wheel angle tracking control
2.1.2 地头转向控制
基于纯追踪模型设计了地头转弯控制算法[27],如图5所示:1)设定前视距离为Dh,当前定位坐标为Pc(xc,yc),车辆当前航向角为φC,曲线路径离散点距离Pc最近的点为Pn;2)自Pn沿曲线路径方向依次搜索点Pn+k(xn+k,yn+k),直至PcPn+k;3)喷雾机的目标航向角φaim,如式(8)
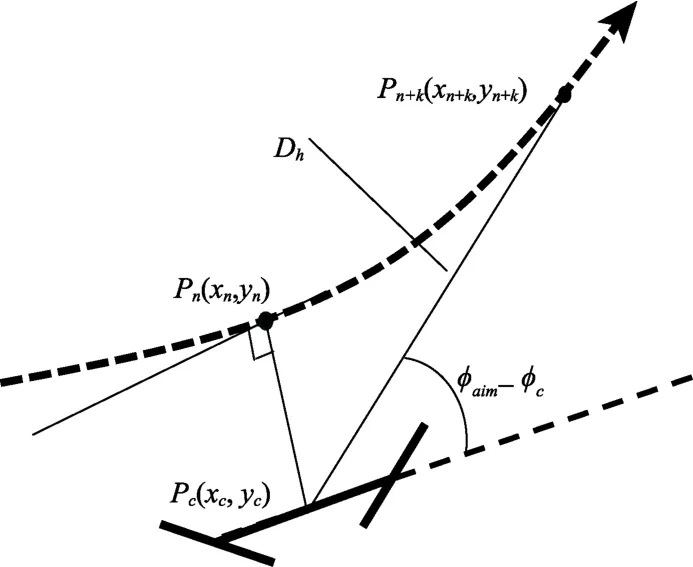
图5 地头转弯路径跟踪控制示意图Fig.5 Path tracking control sketch for headland turn

设计控制律得到曲线路径跟踪的决策车轮角

式中k3为决策轮角系数。
2.2 一体化喷雾作业控制方法
喷雾机一体化作业控制由车轮角度控制部分、油门开度控制部分和喷雾作业控制查询列表组成。其中,基于F-PID设计了车轮角度控制算法和油门开度控制算法;依照人工驾驶操作经验并结合本系统电气结构特点,设计了喷雾机自动作业查询列表,如表2所示。
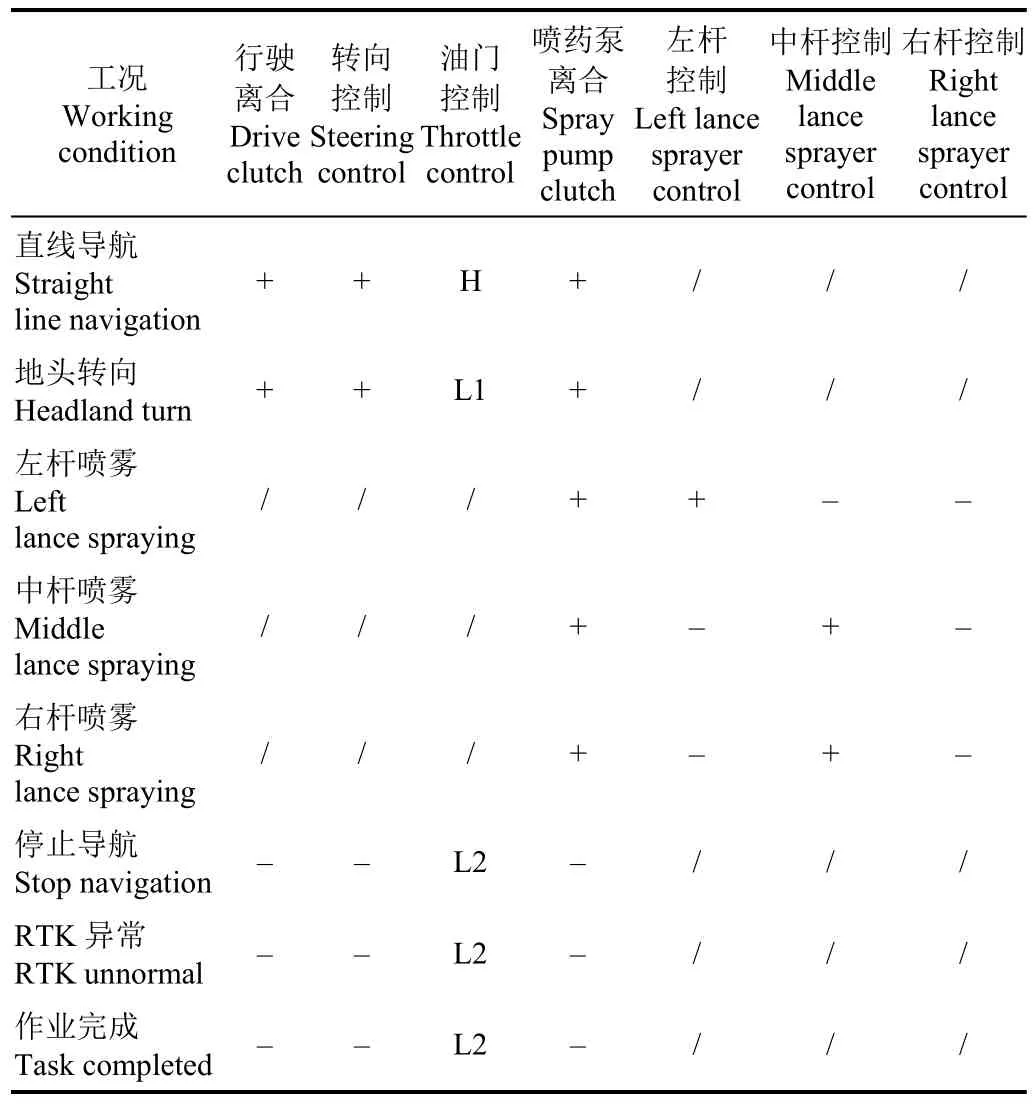
表2 一体化自主作业控制策略Table 2 Integrated autonomous operation control strategy
3 测试试验
3.1 试验过程
2016年6月在江苏省黄海农场,分别在水泥地面、旱田和水田3种不同环境场地,速度为0.8,1.3和1.5 m/s时,进行了 3次以上的重复试验,受限于本平台的作业速度,更高速度下的试验未开展。
试验过程为:1)导航控制系统引导喷雾机自动完成直线行走和地头转弯对行、速度高低切换,喷杆喷雾控制等作业,在RTK差分数据异常和作业完成时控制车辆停车、停喷,油门至怠速位置;2)导航作业完成后导出导航过程参数,包括位姿信息、跟踪偏差、转向车轮角及油门控制信息、其他状态标志位等。控制参数为:1)为更好的测试地头转弯平顺性,根据不同测试环境设定了不同的作业幅宽范围,水泥路面、水田试验设置最大幅宽为12 m,最小幅宽为6 m;旱田试验最大、最小幅宽同为6 m;地头转弯半径为3 m;2)曲线路径追踪控制参数k3=1,前视距离Dh=2 m,转弯对行的引导过渡线Lt=4 m;3)作业完成地头停车的边界距离S≤2 m。
相同地况条件,不同速度下的直线路径跟踪控制精度一致性较好,但车身在1.3、1.5 m/s速度下转弯会发生明显的侧滑,影响对行的平稳性;地面颠簸对导航控制精度影响明显,且喷雾机在大幅颠簸作业时喷杆会产生剧烈晃动,在喷杆高度较低时喷杆末端易产生触地危险。
为防止喷雾机在作业时因大幅颠簸造成喷杆触地导致喷头堵塞及损伤,和较高速度下的转弯侧滑导致接行平顺性差及作物损伤,并根据黄海农场喷雾作业的速度标准,最终在1.3 m/s速度下进行了3地况环境下的直线路径跟踪试验,在0.8 m/s速度下完成地头转弯。导航路径轨迹如图 6所示,其中水泥路面试验场地长 75、宽40 m,规划4行;旱田长60 m、宽32 m,规划5行;水田长95 m、宽38 m,规划4行。
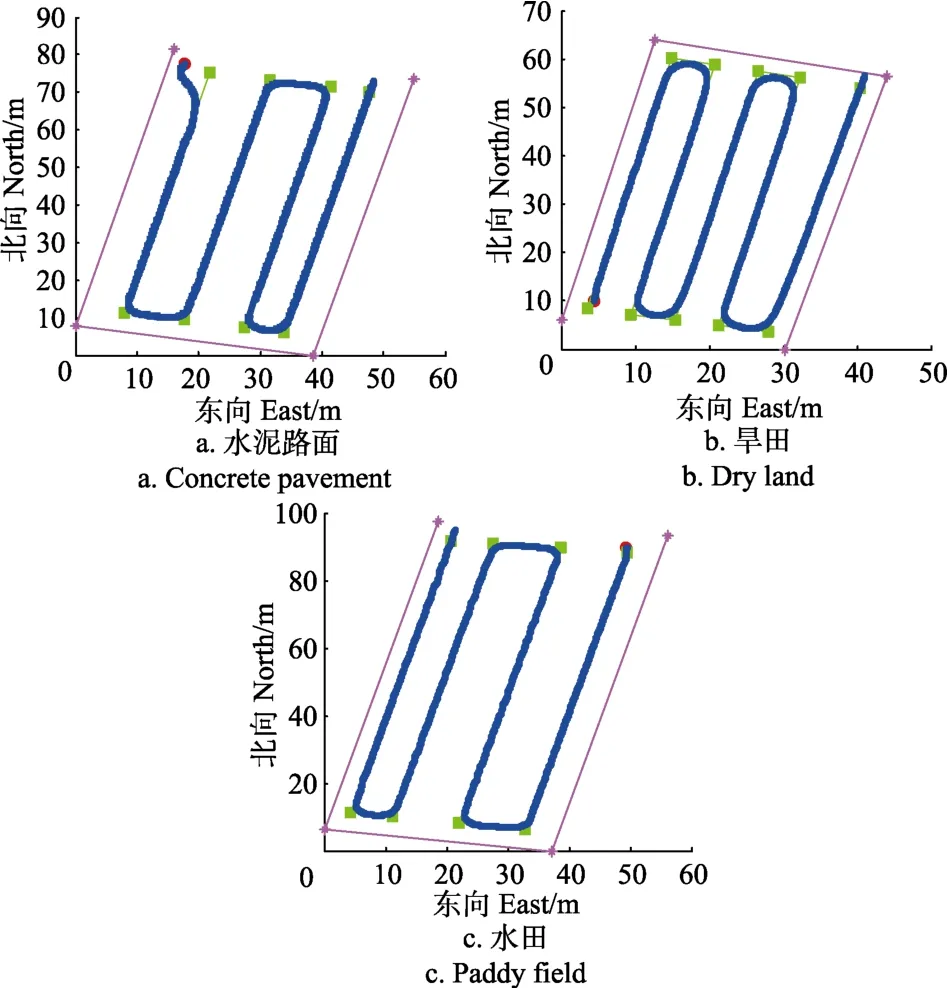
图6 不同地块的导航作业轨迹Fig.6 Navigation operation trajectories in different fields
3.2 试验数据分析
对横向位置偏差的极值、均值和标准差进行了统计分析,其中偏差的极值和均值反映了导航控制精度,标准差反映了导航控制的稳定性;同时,为考察地形环境对导航系统精度和稳定性的影响,本文对导航过程中的车身横滚角的极值、均值和标准差进行了统计分析[28-29],如表3所示。
3.2.1 导航控制精度
在水泥路面上,各行的导航控制偏差均值依次为–1.0、0.4、0.2、–0.2 cm,总体平均值为–0.15 cm,其中第 1行因导航初始位置偏离路径过大导致上线过程出现小幅超调,造成偏差明显大于其他行;旱田环境下,各行的偏差均值依次为1、1.6、0.9、1.4、1.9 cm,行间偏差均值稳定,总体平均值为 1.3 cm;水田环境下,各行的导航控制偏差的均值依次为2.3、2.9、2.3、1.4 cm,行间偏差均值稳定,总体平均值为 2.2 cm。数据表明,同一地块环境下的各行导航控制偏差相近,体现了导航系统较好的控制精度;但在不同地况下表现出了明显的差异性。
3.2.2 导航控制稳定性
水泥路面上,各行的横向位置偏差标准差依次为1.4、1、0.9、0.8 cm,标准差平均值为1 cm;旱田环境下,各行位置偏差的标准差依次为4.6、3.4、3.1、2.1、3.5 cm,标准差平均值为 3.3 cm;水田环境中,各行位置偏差的标准差依次为3、4.8、4.7、5.2 cm,标准差平均值为4.4 cm。数据表明,同一地块环境下各行的导航控制偏差的标准差相近,体现了导航系统较好的稳定性;但不同地况表现出了明显的差异性。
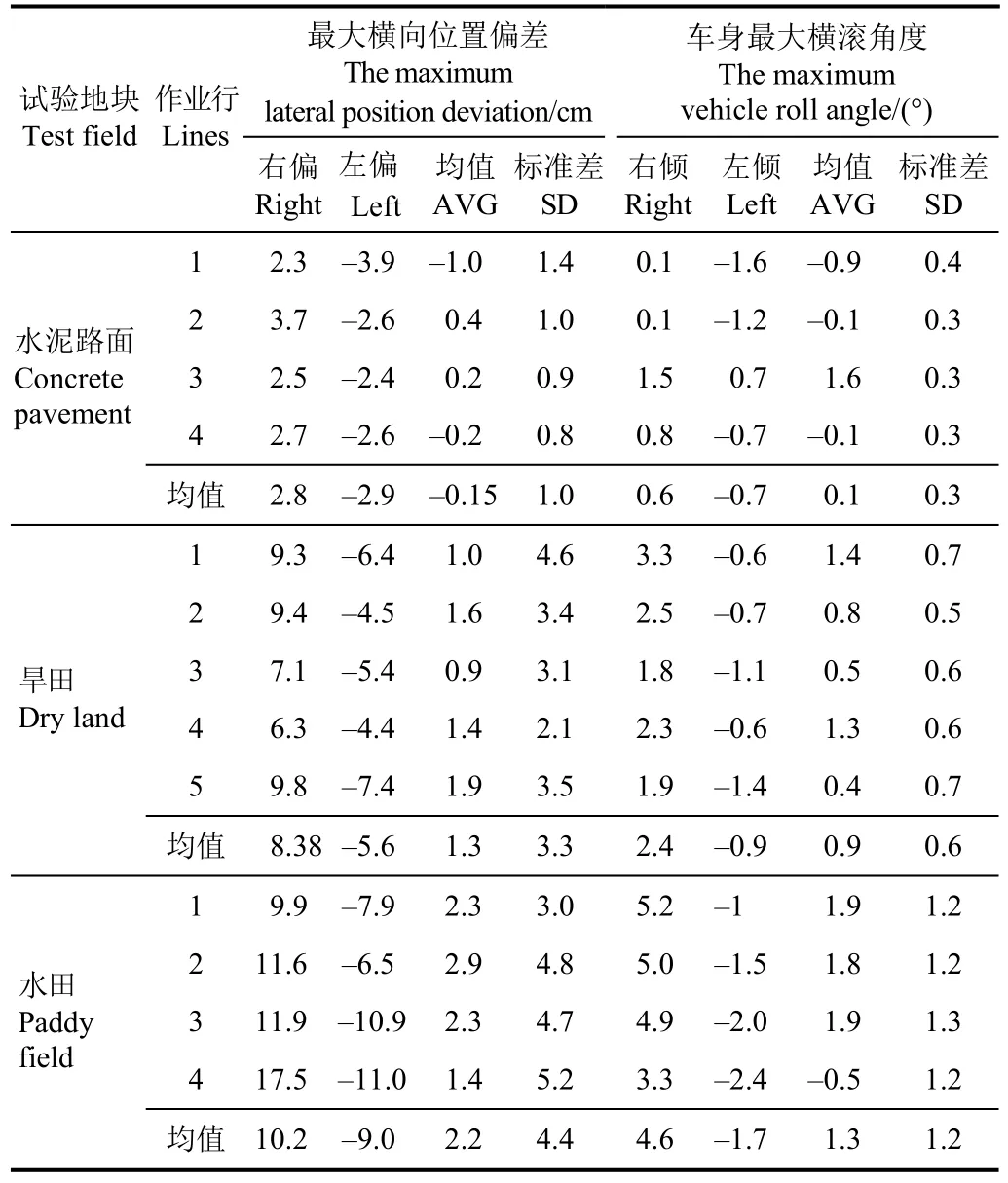
表3 不同地块各行横向位置偏差和横滚角度数据统计Table 3 Statistical of lateral position deviation and roll angle of each row in different fields
3.2.3 地况对精度和稳定性的影响
采用 EXCEL软件对各行的位置偏差极值和车身横滚角极值做线性拟合,如图 7所示:两者呈现了显著的正比例线性关系,决定系数R2=0.914。
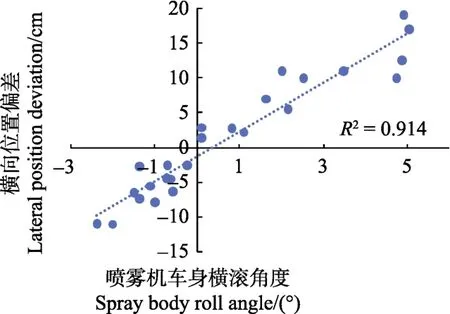
图7 喷雾机车身横滚角度与横向位置偏差Fig.7 Sprayer body roll angle and lateral position deviation
同时,采用EXCEL软件对各行位置偏差标准差和车身横滚角标准差进行指数曲线拟合,如图 8所示。两者呈现了显著的正比例指数关系,决定系数R2=0.947。
数据表明,导航控制的精度和稳定性随地况条件的下降而下降,地况颠簸引起的车体偏斜使车辆侧向力和行驶偏移量增大,造成了侧滑和车身方向的偏斜,进而对导航控制的精度和稳定性造成了影响,这与相关学者的对车辆颠簸横滚与车体侧向力、行驶侧偏明显相关的研究结论相符合[30-31]。
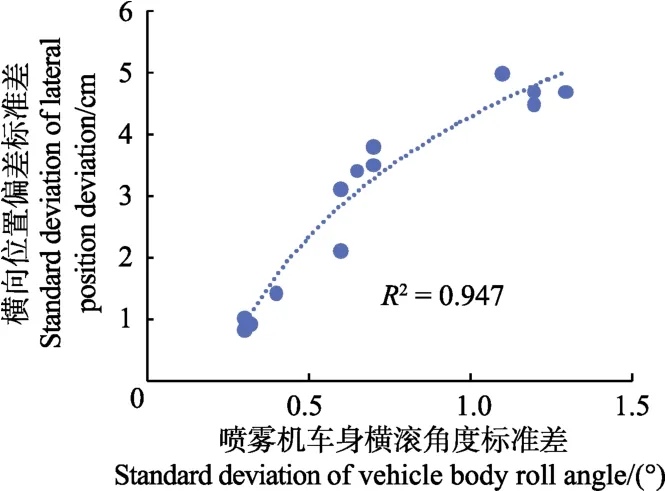
图8 车辆横向位置偏差标准差和车身横滚角度标准差关系曲线Fig.8 Relation curve for standard deviation of lateral position deviation and standard deviation of vehicle body roll angle
4 结 论
1)基于RTK-GNSS双天线导航定位传感器设计了喷雾机自动导航控制系统,试验表明该系统能够自动完成导航路径规划,设计的路径跟踪控制器能够引导喷雾机自动完成直线行驶和地头转弯,设计的一体化自动作业控制器能够控制喷雾机自动完成喷雾控制、油门控制和行驶离合控制。高地隙喷雾机导航作业系统能够在极少人干预情况下自动完成田间喷雾作业。
2)通过水泥路面、旱地和水田3种环境试验测试,导航控制直线路径跟踪横向位置偏差绝对值的最大值依次为 3.9、9.8、17.5 cm,平均值的绝对值依次为 0.15、1.3、2.2 cm,标准差依次为1.0、3.3、4.4 cm;同一地块的各行位置偏差均值和标准差相近。数据表明,导航系统具有良好的稳定性和控制精度,能够满足水田、旱田环境下的喷雾作业要求。
3)导航控制的精度和稳定性随地况条件的下降而下降。导航测试中各行的车身横滚角最大值与横向位置偏差最大值之间呈显著的线性关系,决定系数为0.914;各行车身横滚角的标准差与横向位置偏差的标准差之间呈显著的指数关系,决定系数为0.947。
[1] 姬长英,周俊. 农业机械导航技术发展分析[J]. 农业机械学报,2014,45(9):44-54.Ji Changying, Zhou Jun. Current situation of navigation technologies for agricultural machinery[J]. Transactions ofthe Chinese Society for Agricultural Machinery, 2014, 45(9): 44-54. (in Chinese with English abstract)
[2] 胡静涛,高雷,白晓平,等. 农业机械自动导航技术研究进展[J]. 农业工程学报,2015,31(10):1-10.Hu Jingtao, Gao Lei, Bai Xiaoping, et al. Review of research on automatic guidance of agricultural vehicles[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(10): 1-10. (in Chinese with English abstract).
[3] 周良富,沈启杨,秦维彩,等. 自走式高地隙喷杆喷雾机防治效果试验分析[J]. 江苏农机化,2006(3):22-25.Zhou Liangfu, Shen Qiyang Qin Weicai, et al. Research on the control efficiency of an autonomous self-propelled high clearance boom sprayer[J]. Jiangsu Agricultural Mechanization, 2006(3): 22-25. (in Chinese with English abstract)
[4] 林立恒,侯加林,吴彦强,等. 高地隙喷杆喷雾机研究和发展趋势[J]. 中国农机化学报,2017,38(2):38-42.Lin Liheng, Hou Jialin, Wu Yanqiang, et al. Review and development trend of high clearance boom sprayer[J].Journal of China Agricultural Mechanization, 2017, 38(2): 38-42. (in Chinese with English abstract)
[5] Bell T. Automatic tractor guidance using carrier-phase differential GPS[J]. Computers and Electronics in Agriculture,2000, 25(1/2): 53-66.
[6] Li Taochang, Hu Jingtao, Gao Lei, et al. Research on straight-line path tracking control methods in an agricultural vehicle navigation system[C]// The 11th International Conference on Precision Agriculture. Indianapolis, Indiana,USA, 2012.
[7] 张智刚,罗锡文,周志艳,等. 久保田插秧机的 GPS 导航控制系统设计[J]. 农业机械学报,2006,37(7):95-97.Zhang Zhigang, Luo Xiwen, Zhou Zhiyan, et al. Design of navigation control system for rice transplanter[J].Transactions of the Chinese Society for Agricultural Machinery, 2006, 37(7): 95-97. (in Chinese with English abstract)
[8] 罗锡文,张智刚,赵作喜,等. 东方红X-804拖拉机的DGPS自动导航控制系统[J]. 农业工程学报,2009,25(11):139-145.Luo Xiwen, Zhang Zhigang, Zhao Zuoxi, et al. Design of DGPS navigation control system for dongfanghong X-804 tractor[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(11): 139-145. (in Chinese with English abstract)
[9] 刘兆祥,刘刚,籍颖,等. 基于自适应模糊控制的拖拉机自动导航系统[J]. 农业机械学报,2010,41(11):148-152,162.Liu Zhaoxiang, Liu Gang, Ji Ying, et al. Autonomous navigation system for agricultural tractor based on self-adapted fuzzy control[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(11): 148-152,162. (in Chinese with English abstract)
[10] 伟利国,张权,颜华,等. XDNZ630型水稻插秧机 GPS自动导航系统[J]. 农业机械学报,2011,42(7):186-190.Wei Liguo, Zhang Quan, Yan Hua, et al. GPS automatic navigation system design for XDNZ630 rice trans planter [J].Transactions of the Chinese Society for Agricultural Machinery,2011, 42(7): 186-190. (in Chinese with English abstract)
[11] 熊中刚,叶振环,贺娟,等. 基于免疫模糊PID的小型农机路径智能跟踪控制[J]. 机器人,2015,37(2):212-222.Xiong Zhonggang, Ye Zhenhuan, He Juan, et al. Small agricultural machinery path intelligent tracking control based on fuzzy immune PID[J]. Robot, 2015, 37(2): 212-222. (in Chinese with English abstract)
[12] 张美娜,吕晓兰,陶建平,等. 农用车辆自主导航控制系统设计与试验[J]. 农业机械学报,2016,47(7):42-47.Zhang Meina, Lü Xiaolan, Tao Jianping, et al. Design andexperimental of automatic guidance control system in agricultural vehicle[J]. Transactions of the Chinese Societyfor Agricultural Machinery, 2016, 47(7): 42-47. (in Chinese with English abstract)
[13] O’Connor M L. Carrier-Phase Differential GPS for Automatic Control of Land Vehicles[D]. Stanford: Stanford University, 1997.
[14] Bell T. Precision Robotic Control of Agricultural Vehicles on Realistic Farm Trajectories[D]. Stanford: Stanford University,1999.
[15] Erkan K, Erdal K, Herman R, et al. Towards agrobots:Identification of the yaw dynamics and trajectory tracking of an autonomous tractor[J]. Computers and Electronics in Agriculture, 2015(115): 78-87.
[16] Han Xiongzhe, Hak Jinkim, Joon Yongkim, et al.Path-tracking simulation and field tests for an auto-guidance tillage tractor for a paddy field[J]. Computers and Electronics in Agriculture, 2015(112): 161-171.
[17] 孟庆宽,仇瑞承,张漫,等. 基于改进粒子群优化模糊控制的农业车辆导航系统[J]. 农业机械学报,2015,46(3):29-36.Meng Qingkuan, Qiu Ruicheng, Zhang Man, et al.Navigation system of agricultural vehicle based on fuzzy logic controller with improved particle swarm optimization algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3): 29-36. (in Chinese with English abstract)
[18] 张万枝,白文静,吕钊钦,等. 线性时变模型预测控制器提高农业车辆导航路径自动跟踪精度[J]. 农业工程学报,2017,33(13):104-111.Zhang Wanzhi, Bai Wenjing, Lü Zhaoqin, et al. Linear time-varying model predictive controller improving precision of navigation path automatic tracking for agricultural vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017,33(13): 104-111. (in Chinese with English abstract)
[19] Seong In Cho, Jae Hoon Lee. Autonomous speed sprayer using differential global positioning system, genetic algorithm and fuzzy control[J]. Journal of Agricultural Engineering Research, 2000,76(2):111-119.
[20] Nagasaka Yoshisada, Saito Hidefumi, Tamaki Katsuhiko, et al. An autonomous rice transplanter guided by global positioning system and inertial measurement unit[J]. Journal of Field Robotics,2009, 26(6/7): 537-548.
[21] 郭娜,胡静涛,王鹤. 基于 GPS 导航的插秧机作业控制系统[J]. 农业机械学报,2013,44(1):200-204.Guo Na, Hu Jingtao, Wang He. Intelligent operation control system for rice transplanter based on GPS navigation[J].Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(1): 200-204. (in Chinese with English abstract)
[22] Hiroki Kurita, Michihisa Iida, Wonjae Cho, et al. Rice Autonomous Harvesting: Operation framework[J]. Journal of Field Robotics 2017,34(6), 1084-1099.
[23] 刘豹,唐万生. 现代控制理论[M]. 3版. 北京:机械工业出版社,2011:193-200.
[24] John W. Peake. Method and Apparatus for Automatic Vehicle Guidance Using Continuous 2-D Poly-Point Path:US 813145B2[P]. 2012-05-06.
[25] Qiu H, Zhang Q. Feedforward-plus-proportional-integralderivative controller for an off-road vehicle electrohydraulic steering system[J]. Journal of Automobile Engineering, 2003,217(5): 375-382.
[26] 吴晓鹏,赵祚喜,张智刚,等. 东方红拖拉机自动转向控制系统设计[J]. 农业机械学报,2009,40(增刊):1-5.Wu Xiaopeng, Zhao Zuoxi, Zhang Zhigang, et al.Development of automatic steering control system based on dongfanghong tractor[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(Supp.l): 1-5. (in Chinese with English abstract)
[27] 黄沛琛,罗锡文,张智刚. 改进纯追踪模型的农业机械地头转向控制方法[J]. 计算机工程与应用,2010,46(21):216-219.Huang Peichen, Luo Xiwen, Zhang Zhigang. Control method of headland turning based on improved pure pursuit mode for agricultural machine[J]. Computer Engineering and Applications, 2010, 46(21): 216-219. (in Chinese with English abstract)
[28] 籍颖,张漫,刘刚,等. 农业机械导航系统综合评价方法[J]. 农业机械学报,2010,41(12):160—164.Ji Ying, Zhang Man, Liu Gang, et al. Synthetically evaluation of agriculture machine navigation system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(12):160-164. (in Chinese with English abstract)
[29] 胡书鹏,尚业华,刘卉,等. 拖拉机转向轮转角位移式和四连杆式间接测量方法对比试验[J]. 农业工程学报,2017,33(4):76-82.Hu Shupeng, Shang Yehua, Liu Hui, et al. Comparative test between displacement and four-bar indirect measurement methods for tractor guide wheel angle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(4): 76-82. (in Chinese with English abstract)
[30] 温琦,陈志,王志,等. 摇摆环境轮式牵引车辆行驶偏移特性仿真分析[J]. 农业机械学报,2011,42(6):28-32.Wen Qi, Chen Zhi, Wang Zhi, et al. Driving deviation properties simulation and analysis of wheeled tractors under ship sway [J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(6): 28-32. (in Chinese with English abstract)
[31] 毛罕平,倪静,韩绿化,等. 高地隙液压四轮驱动喷雾机转向防滑控制系统[J]. 农业机械学报,2012,43(6):58-62.Mao Hanping, Ni Jing, Han Lühua,et al.Turning anti-slip control system of hydraulic four-wheel drive high clearance sprayer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(6): 58-62. (in Chinese with English abstract)