脉振高频信号注入永磁同步电机控制算法研究
2018-01-17张凯泉陈卫兵钟德刚
张凯泉,陈卫兵,王 铭,钟德刚
(1.湖南工业大学 计算机与通信学院,湖南 株洲 412007;2.杭州欣易达驱动技术有限公司,浙江 杭州 310008)
0 引言
在永磁同步电机的控制中,电机转子的位置精度越高,其控制器的控制效果越好,因而如何获得精确的转子位置成了电机控制器研究领域科研工作者们关注的焦点[1]。传统的电机转子位置获取方法,是在电机转轴上安装位置传感器以实时获取转子位置。但是,这些传感器的安装,不仅增加了系统的成本,还降低了系统的可靠性。因此,如何实现永磁同步电机的无机械传感器控制,成为永磁同步电机研发领域的一个研究热点问题。
在无传感器永磁同步电机控制技术中,低速及堵转状态下的转子位置检测是其难点,但是已有研究表明,采用高频信号注入法可以实现无传感器永磁同步电机在低速及堵转状态下的转子位置检测[2]。高频信号注入法又分为旋转高频信号注入法和脉振高频信号注入法。其中,脉振高频信号注入法相对简单,跟踪精度较高,静态和动态性能相对更好[3]。因此,本文拟采用脉振高频信号注入法对不同凸极比的永磁同步电机(permanent magnet synchronous motor,PMSM)进行无传感器转子位置检测技术的对比仿真研究,并且使用二次谐波法[4-8]对磁极极性进行辨识,以提高算法的收敛性。最后,利用Matlab/Simulink建立PMSM电机控制系统的仿真模型。通过对不同凸极比电机系统控制性能的仿真对比分析,结果显示高凸极比电机控制系统的转矩波动较小,转子位置解调更为准确,控制性能更优。
1 脉振高频激励下PMSM的控制原理
脉振高频电压信号注入法,即在估计转子同步坐标系的d轴注入高频正弦电压信号,该方法常被用于零速或低速状态下的转子位置检测。因此时电机绕组的反电势很小或不存在,所以高频激励下的PMSM模型如式(1)所示[9]:

式中:Rs为定子绕组电阻;
Ld、Lq分别为d-q轴的电感分量;
ωi为注入信号的高频角速度;
Udi、Uqi分别为转子旋转坐标系下d-q轴的高频电压分量;
idi、iqi分别为转子旋转坐标系下d-q轴的高频电流分量;
p为微分算子,且p=d/dt;
Zd为d轴的高频阻抗,且

Zq为q轴的高频阻抗,且


则在估计转子同步坐标系下,有
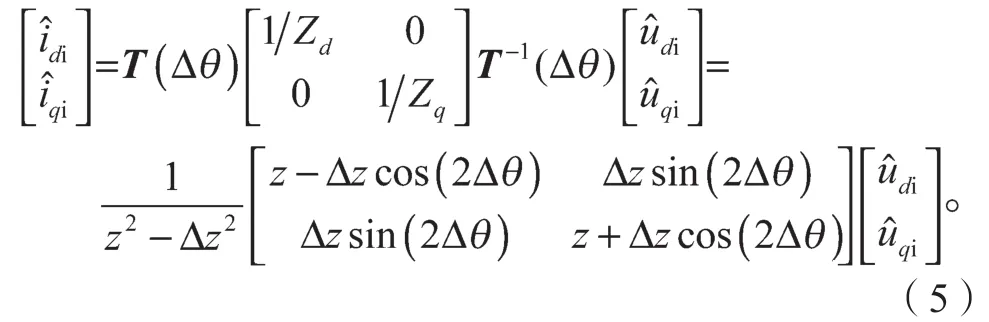
式中:z为d-q轴平均高频阻抗,且z=(Zd+Zq)/2;
Δz为d-q轴半差高频阻抗,且Δz=(Zd-Zq)/2。
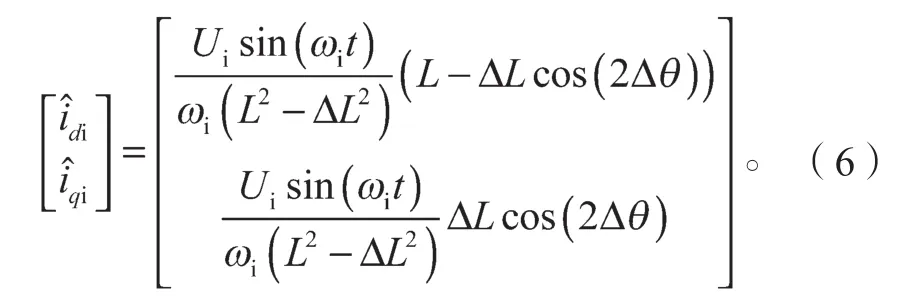
式中:L为d-q轴电感增量的共模分量,且

ΔL为d-q轴电感增量的差模分量,且

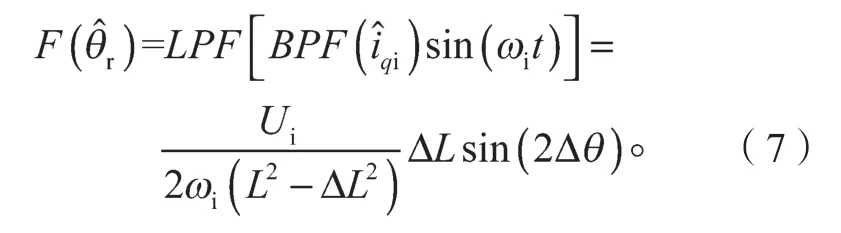
当转子位置偏差足够小时,sin(2Δθ)≈2Δθ,线性化式(7)可得

ΔL与PMSM的参数和注入的高频信号有关。
由式(8)可以得知,若F()调节为0时,Δθ也为0,即转子位置的估计值收敛于转子的实际值,这样,观测器估计的转子位置就是实际的转子位置。转子位置和速度解调结构框图如图1所示。
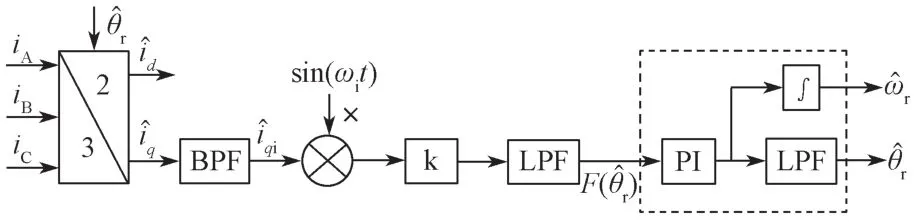
图1 转子位置和速度解调结构框图Fig.1 The rotor position and speed demodulation structure diagram
2 基于脉振高频注入法的转子极性的辨识
在基于脉振高频信号注入法的永磁同步电机无位置传感器控制中,估计的转子位置可能会和转子的实际位置相差π电角度,这是因为在式(8)中,当F()趋于0时,位置估计误差角Δθ可能是0,也可能是π。由于转子凸极的对称性只能分辨出0~π的电角度,所以在F()趋于0的过程中,并不能识别出磁极极性。
本研究采用二次谐波判别法对转子极性进行辨识。由于磁路的饱和效应,d轴磁链和电流呈非线性关系,将磁链和电流之间的关系用泰勒级数关于零点展开,可得:

式中:Ψd为d轴磁链;
Ψm为永磁磁链;

在d轴注入高频余弦电压信号后,可以得到如下响应电流:

式(10)所示响应电流表达式中,含有sin2(ωit)的项为d轴电流二次谐波项,其中含有辨识极性所需要的信息,将其进行幅值调制,并且经低通滤波器 (LPF)处理后可以得到

由式(11)可知,当位置估计误差角Δθ为0时,式(11)为负值;当位置估计误差角Δθ为π时,式(11)为正值。据此可以辨识转子的极性。改进后的转子位置和速度解调结构框图如图2所示,基于脉振高频注入法控制系统的控制框图即PMSM位置估计原理如图3所示。

图2 改进后的转子位置和速度解调结构框图Fig.2 An improved structure diagram of the rotor position and velocity demodulation

图3 基于脉振高频注入法的PMSM位置估计原理Fig.3 PMSM position estimation principle block diagram based on fluctuating high frequency injection method
3 仿真结果分析
仿真试验[10]在Matlab/Simulink环境下完成,两个不同凸极比的电机参数如表1所示,根据图3搭建了相应的仿真模型,如图4所示。

表1 电机参数Table 1 Motor parameters
图4所示仿真系统包括PMSM的矢量坐标变换模块、SVPWM模块、功率模块和高频注入法转子位置解调模块。其中,电机及其测试模块为Simulink中自带模块,通过修改该模块的参数以使其与实例电机相符。

图4 基于脉振高频注入法的PMSM无传感器控制仿真图Fig.4 PMSM sensorless control simulation diagram based on the fluctuating high frequency injection method
3.1 PMSM模块
在整个仿真模块中,PMSM模块是最重要的部分。Matlab/Simulink Simscape提供了按交直流磁链理论建立的PMSM模块。PMSM模块有4个输入端,其中3个为3相输入端,另一个为转矩输入端。PMSM输出量为测量输出向量。主要设置参数有定子电阻、电感、转子磁通、转动惯量和极对数等。
3.2 Clark变换的Simulink实现
Clark变换是将3相静止坐标系abc变换为2相静止坐标系α-β。

图5 Clark变换的Simulink实现Fig.5 Simulink implementation of Clark transformation
3.3 Park变换的Simulink实现
Park变换是将2相静止坐标系α-β变换为2相旋转坐标系d-q。
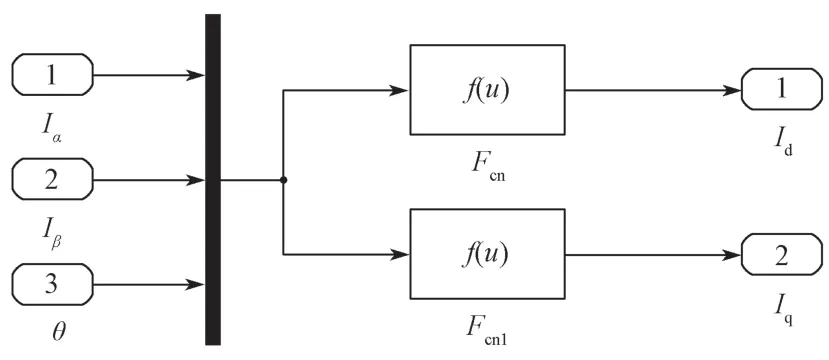
图6 Park变换的Simulink实现Fig.6 Simulink implementation of Park transformation
3.4 反Park变换的Simulink实现
反Park变换是将2相旋转坐标系d-q变换为2相静止坐标系α-β。
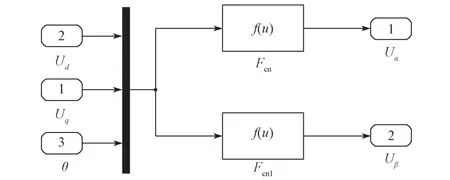
图7 反Park变换的Simulink实现Fig.7 Simulink implementation of inverse park transformation
3.5 SVPWM算法的Simulink实现
SVPWM的主要思想是以三相对称正弦波电压供电时三相对称电动机定子理想磁链圆为参考标准,以三相逆变器不同开关模式适当进行切换,从而形成PWM波。
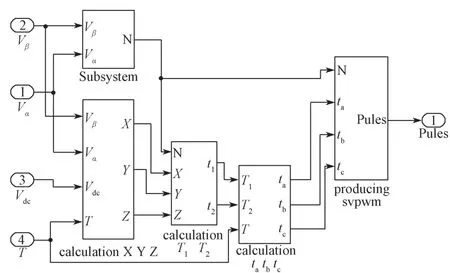
图8 SVPWM算法的Simulink实现Fig.8 Simulink implementation of SVPWM algorithm
3.6 基于二次谐波磁极辨识转子位置解调的Simulink实现
根据图2搭建基于二次谐波磁极辨识的转子位置解调仿真图,如图6所示。
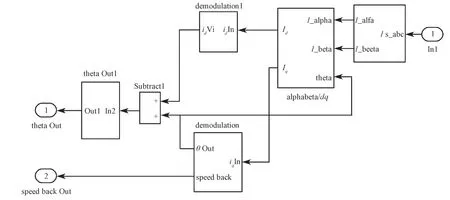
图9 基于二次谐波磁极辨识的转子位置解调的Simulink实现Fig.9 Simulink implementation of the rotor position of demodulation based on the second harmonic magnetic pole identification
在系统仿真中,注入的脉振高频电压信号幅值应远小于电机基波幅值,否则会引起很大的噪声,导致功率损失过大;但注入太小,则会引起转子位置的估计值无法跟上实际值。因此,在本仿真试验中,设定高频信号幅值为1 V,高频信号频率需远大于电机的基波频率(40 Hz),并且要保证能够从逆变器中解调出来,一般频率选取低于逆变器频率的1/2,在仿真中设定高频信号频率为2 kHz。
转子位置解调模块中,采用一阶butterworth滤波器为低通滤波器LPF,它的截止频率要适当选取以便可以很好地滤掉高频分量,但过低也会影响电机的控制性能。因此,在本仿真试验中,LPF选取截止频率为300 Hz;带通滤波器BPF的通带上限截止频率取3 kHz,通带下限截止频率取1 kHz。
仿真给定速度为500 rpm,负载为0.5 N·m,逆变器频率为10 kHz。采用相同的参数对两个电机进行对比仿真,所得结果见图10~12。

图10 速度对比仿真结果图Fig.10 Velocity contrast simulation diagram
图10中,实线为凸极比为2.8的电机速度,其浮动范围约为25 rpm;虚线是凸极比为1.8的电机速度,其浮动范围约为100 rpm。由图10可明显看出小凸极比电机的速度浮动范围较大凸极比的大。
图11中,实线为凸极比为2.8的电机电角度波动曲线,电角度波动范围约为0.15 rad;虚线是凸极比为1.8的电机电角度波动曲线,电角度波动范围约为0.25 rad。由图11可明显看出小凸极比电机的电角度误差值较大凸极比的大。
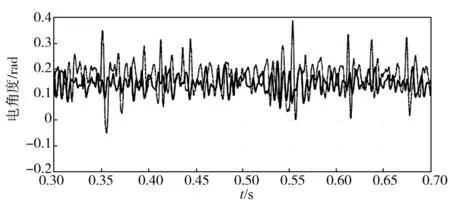
图11 电角度波动对比仿真结果图Fig.11 A simulation diagram of electric degree volatility

图12 转矩对比仿真结果图Fig.12 Torque contrast simulation diagram
图12中,实线为凸极比为2.8的电机0.3~0.5 s的转矩值,可见此时转矩浮动范围约为0.2 N·m;虚线是凸极比为1.8的电机0.3~0.5 s的转矩值,其浮动范围约为0.5 N·m。由图12可明显看出小凸极比电机的转矩浮动范围较大凸极比的大,抖动较强烈。
图10~12所示仿真验证结果显示,凸极比较大的PMSM使用高频注入法易于控制,而凸极比较小的PMSM由于难以对电机转子位置进行精确解调,常会导致控制系统抖动较大。
4 结论
本文研究了基于脉振高频电压注入法的不同凸极比的永磁同步电机无位置传感器控制,实现了基于二次谐波脉振高频电压注入法的转子极性辨识,提高了算法的收敛性,并对不同凸极比电机系统进行了对比分析,仿真结果显示:
1)在使用脉振高频电压注入法时,凸极比较小的电机在实际控制中的动态性能较差、控制效果欠佳,而凸极比较大的电机能够取得较好的控制效果。
2)如要实现全速范围内精确可靠的无位置传感器控制,电机参数选择尤为重要。
本文为永磁同步电机无位置传感器控制系统的优化设计提供了理论依据。
[1]谷善茂,何凤有,谭国俊,等.永磁同步电动机无传感器控制技术现状与发展[J].电工技术学报,2009,24(11):14-20.GU Shanmao,HE Fengyou,TAN Guojun,et al.A Review of Sensorless Control Technology of Permanent Magnet Synchronous Motor[J].Transactions of China Electrotechnical Society,2009,24(11):14-20.
[2]秦 峰,贺益康,刘 毅,等.永磁同步电机转子位置的无传感器自检测[J]. 浙江大学学报(工学版),2004,38(4):465-469.QIN Feng,HE Yikang,LIU Yi,et al. Rotor Position Sensorless Estimation for Permanent Magnet Synchronous Motors[J].Journal of Zhejiang University (Engineering Science),2004,38(4):465-469.
[3]秦 峰,贺益康,刘 毅,等.两种高频信号注入法的无传感器运行研究[J].中国电机工程学报,2005,25(5):116-121.QIN Feng,HE Yikang,LIU Yi,et al.Comparative Investigation of Sensorless Control with Two High-Frequency Signal Injection Schemes[J].Proceedings of the CSEE,2005,25(5):116-121.
[4]JEONG Y S,LORENZ R D,JAHNS T M,et al.Initial Rotor Position Estimation of an Interior Permanent Magnet Synchronous Machine Using Carrier-Frequency Injection Methods[J].IEEE Transactions on Industry Applications, 2005,41(1):38-45.
[5]GONG L M,ZHU Z Q.Robust Initial Rotor Position Estimation of Permanent Magnet Brushless AC Machines with Carrier Signal Injection-Based Sensorless Control[J].Energy Conversion Congress and Exposition,2012,49(6):2602-2609.
[6]HOLTZ J. Acquisition of Position Error and Magnet Polarity for Sensorless Control of PM Synchronous Machines[J].IEEE Transactions on Industry Applications,2008,44(4):1172-1180.
[7]HARKE M C,RACA D,LORENZ R D.Implementation Issues for Fast Initial Position and Magnet Polarity Identification of PM Synchronous Machines with Near Zero Saliency[C]//Conference on Power Electronics and Applications.Dresden:IEEE,2005:1-10.
[8]RACA D,HARKE M C,LORENZ R D.Robust Magnet Polarity Estimation for Initialization of PM Synchronous Machines with Near-Zero Saliency[J].IEEE Transactions on Industry Applications,2008,44(4):1199-1209.
[9]徐艳平,王海垠,钟彦儒.基于脉振高频信号注入法的PMSM无传感器控制[J].电气传动,2009,39(1):11-14.XU Yanping,WANG Haiyin,ZHONG Yanru.Research on Sensorless PMSM Control System with Fluctuating High Frequency Signal Injection[J].Electrical Drive,2009,39(1):11-14.
[10]陈卫兵,宗 蔚,张凯泉,等.基于龙伯格观测器的内埋式永磁同步电机无位置控制算法[J].湖南工业大学学报,2016,30(2):21-25.CHEN Weibing,ZONG Wei,ZHANG Kaiquan,et al. A Sensorless Control Algorithm for Interior Permanent Magnet Synchronous Motor Based on Luenberger Observer[J].Journal of Hunan University of Technology,2016,30(2):21-25 .
