基于模糊聚类的番茄目标快速识别算法
2018-01-12龙金辉朱真峰
龙金辉, 朱真峰
(1.河南机电职业学院信息工程系,河南郑州 451191; 2.郑州大学信息工程学院,河南郑州 451191)
在现代农业装备机械化与智能化方向发展的过程中,果蔬采摘智能机器人的使用能够节省人工成本、降低果蔬损伤率、提高果农经济效益[1-3]。采摘智能机器人的视觉定位系统,须要检测果蔬目标的空间位置,为运动控制提供位置信息。果蔬目标识别的重要技术之一是选择合适的图像分割技术,把果蔬目标从复杂的背景中快速准确地分割出来。目前,国内外许多研究人员开展了大量的研究工作。Harrell等研究自然场景下成熟水果的自适应Otsu阈值分割算法,分析水果的色调、饱和度和灰度等特性,可以实现完整果实从复杂背景中的提取[4-7];Ghabousian等依据水果损伤机理,利用模糊聚类分割算法进行水果损伤检测,从而提取出水果表面伤疤[8-9];赵海波等使用图像阈值分割技术提取出与水果内部品质相关的表面特征,检测水果内部品质[10]。熊俊涛等讨论了模糊聚类分割算法在成熟果蔬检测与识别中的应用,构建基于颜色模型的果蔬图像模糊聚类分割方法[11-12]。
本研究通过对模糊聚类分割算法的研究与分析,结合采摘机器人对图像处理算法所具有的一定自适应性和实时性的要求,以成熟番茄为例,提出一种改进的果蔬图像模糊聚类分割算法。本算法在传统模糊聚类图像分割算法的基础上,通过引入隶属度约束项,加快模糊聚类的收敛速度,缩短图像分割时间,提高目标识别速度,在一定程度上解决了传统模糊聚类图像分割算法所具有的图像过分割现象与迭代次数较多、识别速度较慢的问题。
1 模糊聚类算法
模糊聚类(FCM)算法由Bezdek等提出,其用于图像分割的基本思想是使用隶属度来确定每个数据点属于某个聚类的程度,通过迭代运算,得出目标函数的最小化值,从而确定其最佳类别[13]。模糊聚类算法将n个样本点X=(x1,x2,…,xn)划分为c个类,并求出每个类的聚类中心vi(i=1,2,…,c),使得目标函数达到最小值。其中,每个样本点的隶属度取值范围为[0,1],每个样本点与相应聚类中心的隶属度构成隶属矩阵U。uij∈[0,1]是模糊隶属度,表示第j个样本点隶属于第i个类的程度,满足以下约束条件:
(1)
目标函数为:
(2)
式中:dij为第i个聚类中心与第j个样本点的距离;m为加权指数。
在满足式(1)约束条件下使得目标函数达到最小值。根据拉格朗日乘数法,得出目标函数取得最小值的必要条件为:

(3)
(4)
具体计算过程为:步骤1,在区间[0,1]内随机初始化隶属矩阵;步骤2,根据式(3)计算聚类中心;步骤3,根据式(2)计算目标函数,如果相对上次目标函数值的改变量小于确定的阈值,算法停止;步骤4,根据式(4)更新隶属矩阵,转到步骤2。
2 基于模糊聚类算法的番茄目标识别算法
为提高聚类算法的工作性能、加快图像分割速度,本研究提出一种新的快速FCM图像分割算法,并将该算法应用于番茄目标识别,且取得了比较好的识别效果。
聚类算法的聚类结果对初始中心具有一定的敏感性。在模糊聚类算法中,数据影响类中心的下一次迭代值,隶属度可以认为是数据使类中心产生变化的影响力度量,隶属度越大的数据对类中心的吸引力越大,类中心的下一次迭代值受其影响就越大,离它最近的类中心在下一次迭代时更靠近它,同时对其他的类中心也有不同程度的影响,因此当一个类中心受到离它最近的类中数据吸引靠近该类时,同时也受来自其他类中数据的吸引远离该类,这种情况通常会延缓模糊聚类的收敛速度。
(5)
(6)

(7)
3 试验结果与分析
为验证本研究算法的有效性,选取番茄图像进行图像分割试验,并与传统FCM图像分割算法和Otsu图像分割算法进行对比。试验环境为Windows XP操作系统,2.09 GHz处理器,2 G内存,程序运行环境为Matlab 2012a。
算法的实现步骤如下:设定聚类数目和迭代停止阈值,随机产生满足约束条件的隶属度初始矩阵,计算聚类中心,由于成熟果实目标与背景存在显著的颜色差异,成熟番茄目标的颜色主要为红色,提取背景与目标差别显著的红色通道灰度图像,使用本研究所提出的方法对番茄目标进行分割;分别采用传统模糊聚类算法和Otsu算法对测试图像进行分割;对比3种算法的分割结果,计算分割误差。从测试图像采用上述步骤进行分割的结果中选取出部分如图1所示。其中,图 1-a、图1-e为2张番茄图像的红色通道灰度图,图1-b、图1-f为Otsu算法分割图像得到的番茄目标图像,图1-c、图1-g为传统FCM算法分割图像得到的番茄目标图像,图1-d、图1-h为本算法分割图像得到的结果。
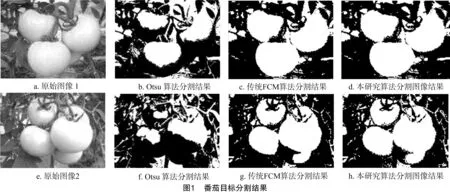
为更客观地判断本算法的准确性,将分割效果分别与传统模糊聚类算法和Otsu算法的分割效果进行对比,引入分割效果的评判标准,即番茄面积的分割错误率σ,其计算方法为
(8)
式中:S为原始图像中番茄目标的真实面积,即番茄区域包含的像素点数;Si(i=1,2,3)分别对应FCM算法、Otsu算法和本方法分割出的面积所包含的像素点数。采用式(8)计算面积分割错误率所得的数据如表1所示,通过对表1的分析可知,Otsu算法的平均分割误差率最高,为45.56%;传统FCM算法的平均分割误差率为19.87%;本算法的平均分割误差率与传统模糊聚类算法接近,但是本算法的平均运行时间大大缩短,运行速度得到了极大的提高。通过上述数据及结果分析表明,利用本研究所提出的算法可以有效地完成番茄目标的分割。
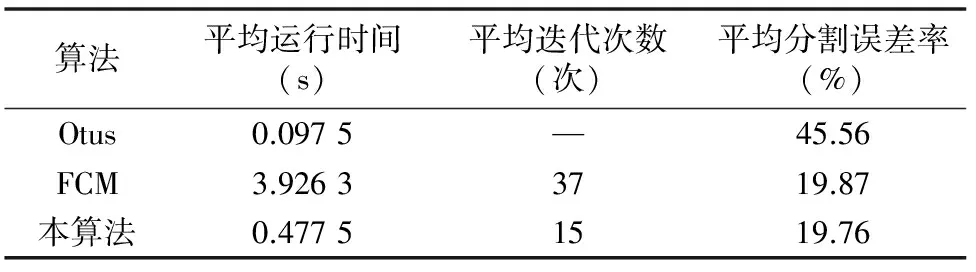
表1 3种算法分割效果比较
注:“—”表示Otus算法非迭代算法。
4 结论
在番茄图像分割中,为提高番茄目标识别的准确性与实时性,本研究对模糊聚类分割图像算法进行改进,通过引入隶属度约束项,加快算法的迭代速度,大大缩短分割图像目标的时间,通过与FCM算法和Otsu算法分割性能的比较发现,将该方法应用于成熟番茄目标的识别能够有效地提高识别速度与识别准确率。
[1]卢 军,王贤锋,后德家. 水果采摘机器人视觉系统研究进展[J]. 湖北农业科学,2012,51(21):4705-4708.
[2]陈 磊,陈帝伊,马孝义. 果蔬采摘机器人的研究[J]. 农机化研究,2011,33(1):224-227,231.
[3]蔡健荣,周小军,李玉良,等. 基于机器视觉自然场景下成熟柑橘识别[J]. 农业工程学报,2008,24(1):175-178.
[4]Harrell R C,Slaughter D C,Adsit P D. A fruit-tracking system for robotic harvesting[J]. Machine Vision and Applications,1989,2(2):69-80.
[5]Grift T,Zhang Q,Kondo N,et al. A review of automation and robotics for the bio-industry[J]. Journal of Biomechatronics Engineering,2008,1(1):37-54.
[6]石雪强,程新文,李春福,等. 自然环境下苹果彩色图像分割研究[J]. 安徽农业科学,2011,39(30):18993-18995,19004.
[7]李 斌,Wang N,汪懋华,等. 基于单目视觉的田间菠萝果实识别[J]. 农业工程学报,2010,26(10):345-349.
[8]Ghabousian A,Shamsi M. Segmentation of apple color images utilizing fuzzy clustering algorithms[J]. Advances in Digital Multimedia,2012,1(1):59-63.
[9]Moradi G,Shamsi M,Sedaghi M H,et al. Fruit defect detection from color images using ACM and MFCM algorithms[C]//International Conference on Electronic Devices,Systems and Applications,2011:182-186.
[10]赵海波,周向红. 基于计算机视觉的番茄催熟与正常熟识别[J]. 农业工程学报,2011,27(2):355-359.
[11]熊俊涛,邹湘军,陈丽娟,等. 基于机器视觉的自然环境中成熟荔枝识别[J]. 农业机械学报,2011,42(9):162-166.
[12]熊俊涛,邹湘军,陈丽娟,等. 荔枝采摘机械手果实识别与定位技术[J]. 江苏大学学报(自然科学版),2012,33(1):1-5.
[13]Bezdek J C. Pattern recognition with fuzzy objective function algorithms[M]. New York:Plenum Press,1981.
