多功能吊挂系统设计①
2018-01-11程武山
陈 森 程武山
(上海工程技术大学机械工程学院)
多功能吊挂系统设计①
陈 森 程武山
(上海工程技术大学机械工程学院)
通过对机械结构和控制原理的深入研究,设计了一种具有肢体任意高度固定并能够进行受损肢体康复训练的多功能智能吊挂系统。主要论述了吊挂系统机械结构的设计和控制系统的实现。控制系统硬件部分的核心为ARM9/S3C2440A芯片,通过设计相应的底板电路来实现整体系统的硬件需求;软件部分以KEIL5为开发环境,通过对I/O口高低电平的控制,来控制电机的运行,从而进一步控制整个系统的运行。通过Solidworks软件仿真验证了机械结构设计的可行性。
智能吊挂 ARM9/S3C2440A Solidworks仿真 电源电路
自20世纪90年代以来,中国老龄化人口日益增多,如今老龄化已经进入快速发展阶段,根据预测老龄人口在2040年将超过人口总量的20%[1]。对于老人而言,面临的最大问题就是肢体的健康问题,肢体行动不便带来的将是生活无法自理,通常将此类老人称为失能老人[2]。由此看来,对于老人而言,肢体健康将是最大的问题。因此,研制出当老人肢体出现问题,能够方便护理并带有康复训练的吊挂系统至关重要。
目前,医院护理床上的吊挂系统在国内还处于低水平层面,仅能提供简单的机械固定功能,对于方便和智能而言,远远不够[3]。现有的吊挂结构已经不能满足快速老龄化的社会需求。为此,笔者研究并设计了一种以ARM9/S3C2440A为核心的多功能智能吊挂系统,这种吊挂系统具有的功能有:肢体固定、肢体训练和肢体按摩。这样不仅满足用户对智能护理产品的需求,更能减轻家庭的护理强度,还可以降低产品成本,利于商业化更利于广大用户[4]。
1 智能吊挂系统的工作原理
智能吊挂系统主要由机械系统和控制系统组成。机械结构的设计主要满足安全参数的设计需求,并对它进行软件仿真来证明机械设计部分的可靠性。控制系统部分主要有ARM9/S3C2440A主芯片模块、GPIO接口模块、电源模块及其控制程序。
通过对电机的控制,点击不同的功能按键,可实现吊挂系统的不同功能。本系统设计的智能吊挂可实现以下功能:
a. 固定悬挂功能。当病人刚刚受伤时,吊挂可以实现固定角度的悬吊,这样的功能即目前医院普通的吊挂功能。
b. 肢体康复锻炼和肌肉按摩功能。考虑到有的患者因为意外事故导致长期卧床,四肢长期得不到锻炼而可能导致肌肉萎缩,因此吊挂系统设计了上下肢康复锻炼和上下肢肌肉按摩的功能,使患者的四肢可以得到康复锻炼,从而促进血液循环,防止肌肉萎缩。
2 机械系统
2.1 机械结构设计
多功能吊挂系统机械结构可分为底盘结构、龙门架结构和电机结构,如图1所示。下方为吊挂底盘,装载8个带自锁功能的万向轮,如此设计是为了提高吊挂整体的方便性:当病人需要护理上肢或者下肢的时候,将吊挂系统移动到相应的部位,即可对肢体进行护理;当病人不需要吊挂系统的时候,便可将此吊挂系统安放在某一空闲的角落,待需要的时候,再将它移出来使用;若病人可以下床,此吊挂系统还可以单独放在某处进行上肢康复训练。
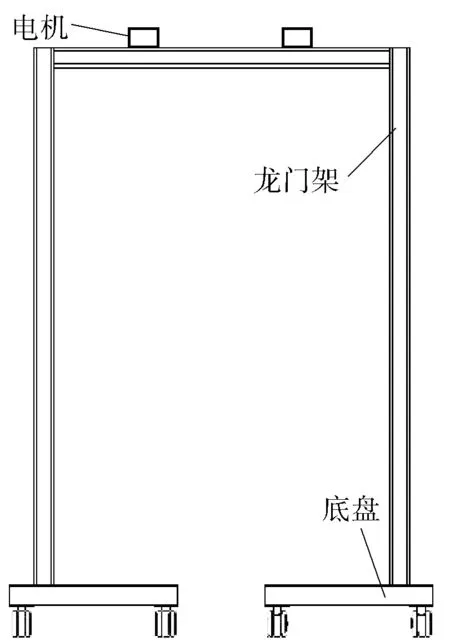
图1 系统机械结构框图
上方为电机安放位置,采用4个电机的设计方式,这种设计是为了方便实现不同肢体不同强度的康复训练要求。通过软件来控制不同的电机,以此来实现不同的功能和护理强度[5]。
2.2 软件仿真验证
作为医疗护理设备,安全因素是非常重要的。本次设计的吊挂系统病人体重的上限值为300kg。相对于上肢而言,下肢的重量更大一些,而下肢的总重量约占人体总重量的35%左右,根据这一数据就可以得到肢体的总重量,以便下一步软件仿真。
为了验证吊挂机械结构是否可行,下面将从可视化角度来进行仿真验证[6]。本次设计所应用的软件为Solidworks软件,这款软件自带一个强大的仿真功能,利用仿真功能,可以更直观地看到设计结果[7]。目前实验数据为:横向750N的力,垂直向下750N的力,这个力相当于106kg的人的腿部重量,而人的腿部占人体总重量的30%~40%,这里取35%。这样的最终结果就是相当于300kg的人体总重量。Solidworks软件仿真结果如图2所示。
仿真的应用材料是铝合金,其单位面积的屈服力为27.570MN,而仿真结果应力图中单位面积的最大屈服力为9.537MN,即吊挂材料的承受力大于设计值,因此此方案是可行的。在位移图中外框架的最上方的最大位移量为1.629mm,几乎没有产生什么形变。所以就目前这个材料的选择和仿真结果来看,完全满足设计任务需求,也更加说明设计的可行性。

a. 应力
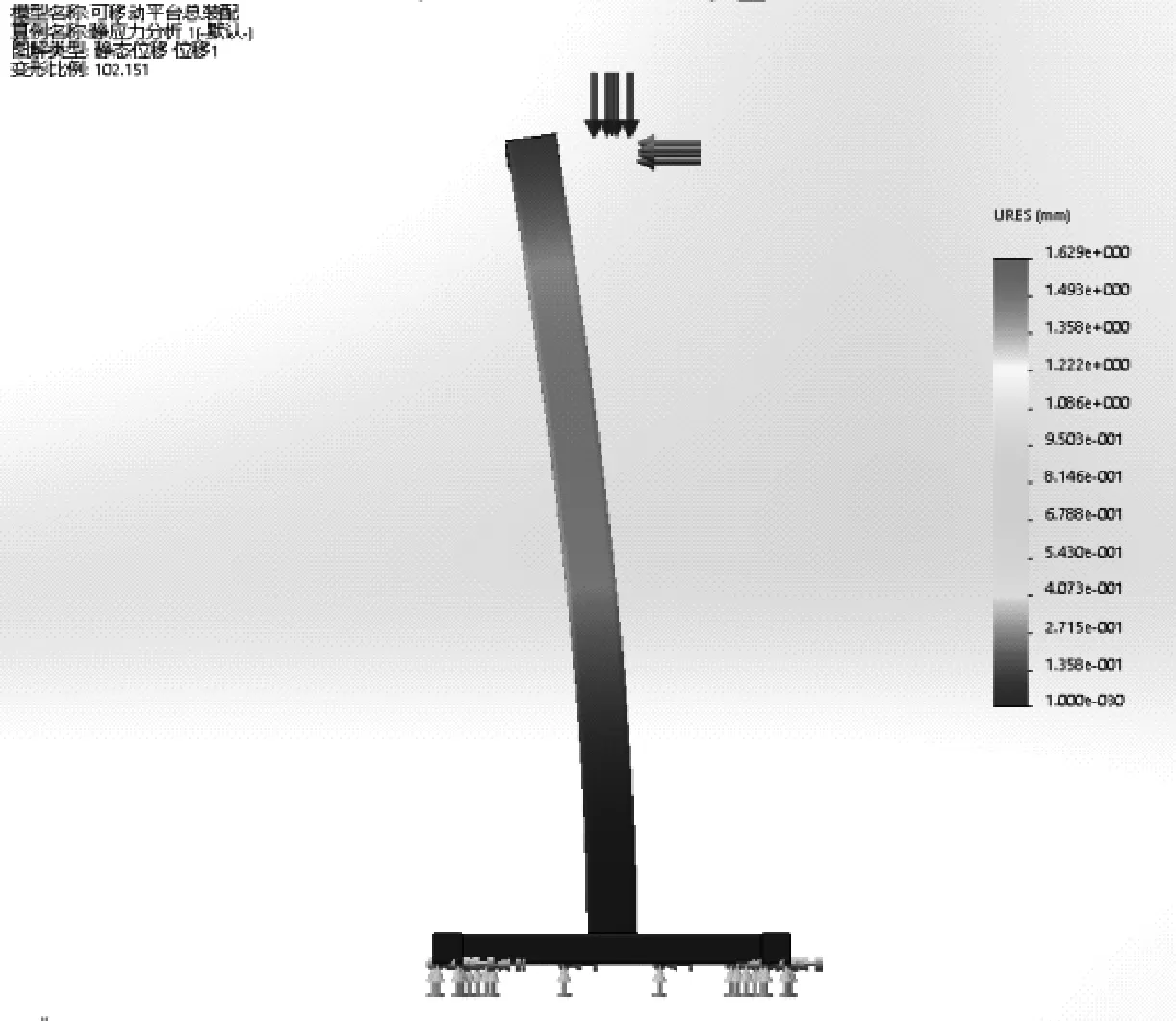
b. 位移
3 硬件设计
多功能吊挂控制系统的核心硬件为ARM9/S3C2440A芯片,根据控制系统的整体需求,设计了系统的硬件架构,并对各个模块电路进行设计,完成开发板设计。系统硬件架构如图3所示。吊挂的ARM9由核心板和底板构成,核心板通过插针插在底板上,这样设计的优势在于:当需要增加其他功能时,只需要修改底板,如此一来在很大程度上降低了工作量和设计成本[8]。核心板主要包括:主芯片电源电路模块、Flash电路模块、SDRAM电路模块和时钟电路模块。底板电路的重要模块有:底板电源电路模块、复位电路模块和GPIO接口模块[9]。
在本吊挂系统中,外部设备主要是通过 GPIO 接口与ARM控制器连接,外部设备主要是步进电机控制模块。
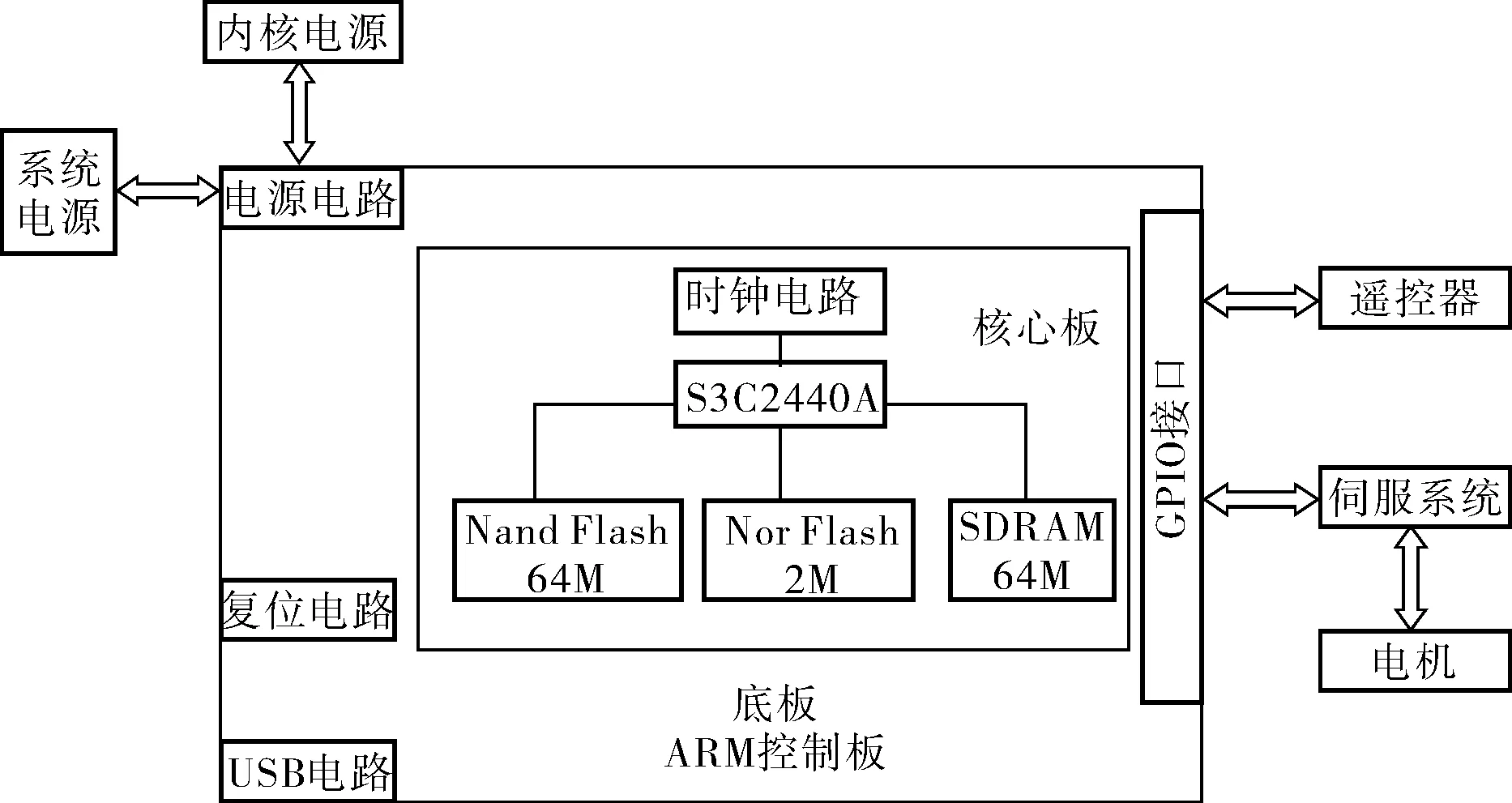
图3 系统硬件架构
3.1 电源电路
电源是系统稳定工作的基本。由于外部采用24V的步进电机,为了外部接口的简洁化,所以外部电路只采用24V的适配器为吊挂系统整体提供总电源[10]。但是ARM9芯片需要的是3.3V电源,其他部分芯片需要5V电源,所以笔者采用的电源电路设计方案为:24V转5V转3.3V。从24V直流电压转换到5V直流电压,由LM2576S-5芯片来实现。
具体电路如图4所示。

图4 24V转5V电路
电压由24V转变成5V后,再通过1.5A低压差线性稳压AMS117-3.3芯片转换成控制板所需电源即3.3V,电路如图5所示。但是主芯片S3C2440A的内核工作电压为1.25V,所以还需要进一步的电压转换,采用MAX8860EUA18芯片来完成3.3V到1.25V的转换[11]。
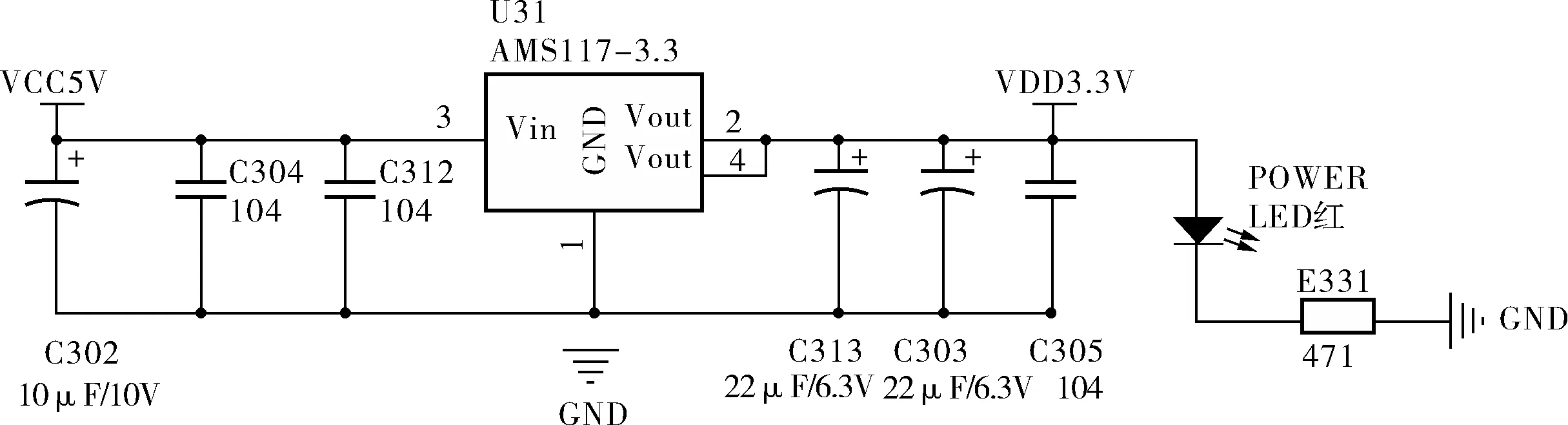
图5 5V转3.3V电路
如果电源滤波不干净的话,电源中含有交流成分,这将会严重影响整个系统的工作,所以电源电路中一定要设置滤波电路。滤波电路如图6所示。

图6 电源滤波电路
3.2 复位电路
复位电路的好坏直接影响系统电路的稳定运行,对整个系统的稳定性将产生至关重要的影响。复位电路有两种方式,分别为手动复位方式和自动复位方式。自动复位是由程序来控制的,手动复位则是需要借助开关按钮来进行系统复位。本次设计采用MAX811S作为复位芯片,同时该芯片也可以对系统电压进行实时监控。当MAX811S检测到当前系统电压小于设定的复位值时,系统就会进行复位操作。该芯片的引脚4为电源输入端,提供3.3V电源,引脚3接一个按钮实现复位功能,引脚2为复位输出端,并串接了一个限流电阻来保证下路芯片的安全。复位电路如图7所示。
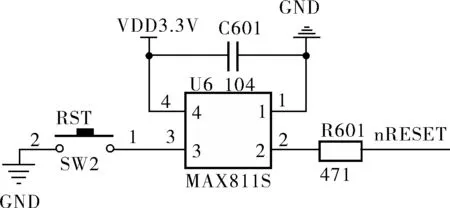
图7 复位电路
3.3 外部GPIO接口扩展电路
S3C2440A芯片具有130多个I/O口,通过GPIO接口,可以将系统多余的端口引出来,方便后续功能的增加和其他设备的连接。在中断口的地方增加上拉电阻,这样既可以提高抗干扰能力,同时还可以确保系统的正常运行。部分外部GPIO扩展电路如图8所示。
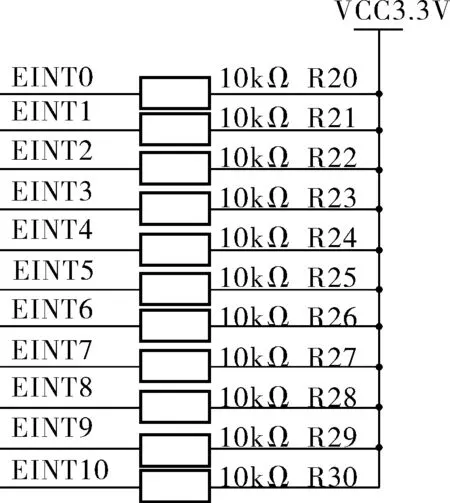
a. 中断口上拉电路

b. GPIO接口
4 软件设计
主程序流程如图9所示。程序为模块化程序,这样设计的目的在于方便修改。程序的功能主要有界面动画显示模块和功能选择模块。界面动画显示模块为显示屏部分,此部分提供视觉展示效果,以动画的模式让病人知道自己的护理过程。
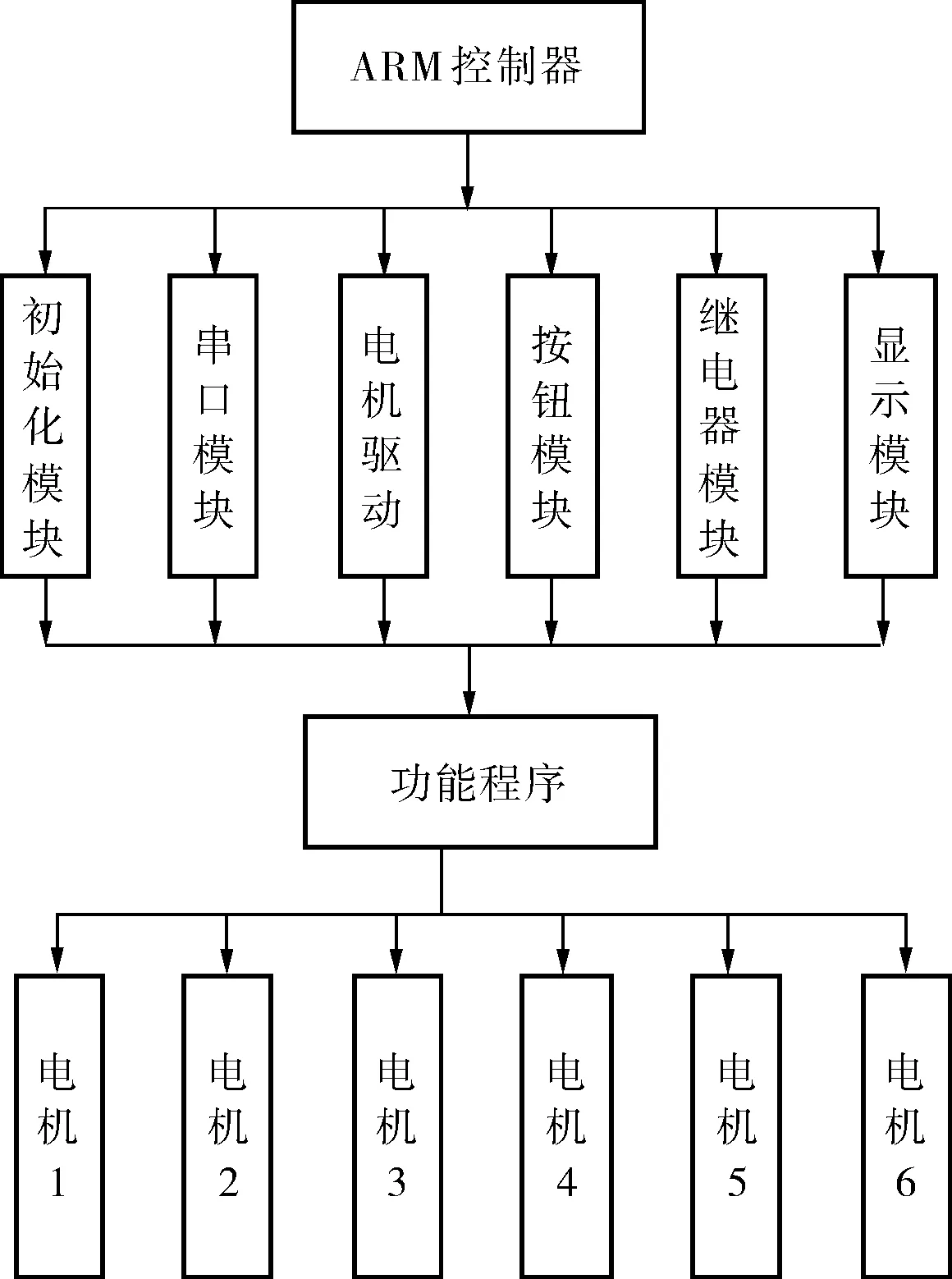
图9 主程序流程
吊挂系统总电源接通后,程序会自动执行初始化操作。初始化后便检测当前的系统状态并在界面上显示。用户可以根据状态显示结果考虑是否需要复位操作,然后进行吊挂功能的选择并进行吊挂功能的执行,与此同时继电器打开给电机上电,在程序的控制下实现相应的功能,最后结束当前功能[12]。
按钮模块有4个功能按键,分别为:固定模式按键、康复护理按键、肌肉按摩按键和复位按键。病人可以根据需要选择不同的护理模式来实现护理需求。
用程序控制步进电机,每个电机都分配有独立的端口,用“0”表示电机反转,用“1”表示电机正转,在KEIL5编译软件中,部分控制程序如下[13]:
//3号电机驱动
if((0==back_run_up_flag)&&(0==back_run_down_flag)&&(0==leg_run_up_flag)
&&(0==leg_run_down_flag)&&(0==washlet_run_flag)&&(0==body_turn_left_flag)&&(0==body_turn_right_flag))
{
int j;
Hang_1_2(1,43000);//将左肢抬高
delay_ms(1000);
for(j=0;j { LED1=0; //在康复训练过程中LED1闪烁 Hang_1(1,75000); //向上运动 LED1=1; delay_ms(1000); LED1=0; Hang_1(0,75000); //向下运动 LED1=1; delay_ms(1000); } Hang_1_2(0,43000); //将左肢放平到原来的位置 LED1=1; } else { LED0=0; //若不满足条件,LED0/LED1闪一下 LED1=0; delay_ms(100); LED0=1; LED1=1; } 多功能智能吊挂系统整体联调是将ARM9控制系统和机械结构系统结合起来进行调试,测试整体系统的设计是否能够满足预先的设计需求。本设计主要从以下几个方面对整体系统进行调试: a. 通过串口通信,将程序烧入ARM芯片,用示波器检测各个主要端口的信号是否正常; b. 整体系统上电,通过遥控器上的按键选择不同的护理模式来检测各个功能运行是否正常; c. 让测试者在测试时晃动腿部,以此来检测机械结构的稳定性和整体系统运行的稳定性。 在整体联调的同时,多次修改程序来完善产生的问题,使得最终设计满足预期要求。并且经过多功能吊挂系统的整体调试,在系统能够满足功能需求的情况下,反复测试整体系统,大量的测试结果充分证明了整体系统运行的可靠性和稳定性。 针对国内吊挂水平低下的现象,研究并设计了一种多功能的智能吊挂方案。建立了基于ARM9的嵌入式控制系统,完成了对多功能吊挂的控制。详细介绍了硬件电路的模块化设计并对整体机械结构进行了仿真验证,最后通过了整体系统调试,结果证明此吊挂系统运行的可靠性和安全性,满足了社会对智能护理产品的需求,对高端护理产品在国内的发展具有一定的促进作用。今后,还需要进一步结合实际,对整个系统进行优化升级。 [1] 王霞.中国人口结构变动与老龄化问题研究[J].济南大学学报(社会科学版),2015,25(2):66~69. [2] 赵向红.城市失能老人长期照料问题的应对之策[J].贵州社会科学,2012,(10):129~132. [3] 廖翼.智能护理床的发展现状与趋势[J].医疗装备,2013,26(10):5~7. [4] Shyu K K,Chiu Y J,Lei P, et al.Total Design of an FPGA-Based Brain-Computer Interface Control Hospital Bed Nursing System[J].IEEE Transactions on Industrial Electronics,2013,60(7):2731~2739. [5] 田帅,侯杰.多功能护理床的设计研究[J].科技致富向导,2010,27:129. [6] 陈永当,鲍志强,任慧娟,等.基于Solidworks Simulation 的产品设计有限元分析[J].计算机技术与发展,2012,22(9):177~180. [7] 周晴,杜平安,刘孝保.面向对象有限元分析技术及其实现方法研究[J].系统仿真学报,2012,24(3):582~586. [8] 李述良,冯杰,刘文进,等.基于S3C2440A嵌入式系统的硬件设计[J].黄冈师范学院学报,2009,29(3):37~41. [9] 张豪,杨春燕,汪筱阳. S3C2440A芯片及应用[J].电子设计工程,2011,19(24):26~29. [10] 谭林,鲁守银,张伟,等.机器人化护理床及其控制系统[J].山东建筑大学学报,2010,25 (1) :18~20. [11] 江俊辉.基于ARM的嵌入式系统硬件设计[J].微计算机信息,2005,(10):120~122. [12] 张铁,谢存禧,周惠强,等.一种机器人化的多功能护理床及其控制系统[J].华南理工大学学报(自然科学版),2006,34(2):47~51. [13] 王小强. ARM处理器裸机开发实战:机制而非策略[M].北京:电子工业出版社,2012. DesignofMulti-functionalHangingSystem CHEN Sen, CHENG Wu-shan Through in-depth study of the mechanical structure and control principle, a multi-functional hanging system which boasting of fixing the limbs at a height at will and rehealthy training of the damaged limbs was designed. The realization of hanging system’s structure design and the implementation of control system were elaborated. The ARM9/S3C2440A chip which acting as the core of the control system can realize the system hardware requirements through the design of backplane circuit; through taking KEIL5 as development environment in software part and the control over the high and low level of I/O port, the motors’ operation and the operation of the whole system were controlled. Simulation with Solidworks software verifies the feasibility of the mechanical structure design. intelligent hanging, ARM9/S3C2440A, Solidworks simulation, power circuit 陈森(1992-),硕士研究生,从事嵌入式系统的研究,739779625@qq.com。 TH865 A 1000-3932(2017)12-1164-06 2017-09-06, 2017-11-07) 全球No.1双盘阀问世 “中国制造”再上新台阶! 近日,安特威集团成功研制出了20英寸双盘阀,这也是迄今为止全球最大的双盘阀,再次引发业界的高度关注。 双盘阀是安特威匠心独运的创造之举!这是专门为煤化工锁斗系统切断阀量身定制的一种特殊阀门。一直以来,锁斗阀故障是制约煤气化装置稳定运行的重要因素,就算是进口阀门的在线寿命也难以突破四千小时。安特威针对这一技术瓶颈,创造性地将盘阀引入该领域,最终研制出全球首台双盘阀,寿命提升了4~5倍,为国家节省了大量资源,极大地提升了客户的经济效益。 目前,安特威双盘阀已应用在神华宁煤400万吨煤制油、潞安集团400万吨煤制油、大同煤业集团煤制甲醇、明水化工改扩建及新能能源二期等项目上,无论是寿命还是可靠性均深受客户赞誉!5 系统调试
6 结束语
(CollegeofMechanicalEngineering,ShanghaiUniversityofEngineeringScience)