基于位姿调整的晶圆传输机械手运动学和动力学分析①
2018-01-11龚永佳
龚永佳 宋 芳
(上海工程技术大学工程实训中心)
基于位姿调整的晶圆传输机械手运动学和动力学分析①
龚永佳 宋 芳
(上海工程技术大学工程实训中心)
搭建位姿可调整的晶圆传输机械手平台,通过对自由度的分析,验证该机械手满足晶圆传输要求的平动和转动。建立运动坐标系,并进行运动学分析,然后建立该机械手的运动学方程。基于拉格朗日方法进行动力学分析,推导并建立动力学数学模型,并验证动力学模型的准确性。
传输机械手 位姿调整 晶圆 运动学分析 动力学分析
半导体集成电路(Integrated Circuit,IC)产业是电子信息产业的核心,是推动国民经济和社会信息化发展最主要的高新技术之一[1,2]。IC制造过程十分复杂,而整个制造过程要求晶圆在各道工艺之间频繁运输,晶圆传输系统是IC制造装备中最为重要的组成部分,主要实现晶圆的精确定位与快速平稳搬运任务,因此,晶圆传输能力对IC产业发展至关重要。
晶圆传输机器人是IC产业重要的传输定位设备,其工作速度、定位精度及可靠性等直接影响晶圆的生产效率和制造质量[3]。目前在IC产业广泛应用的晶圆传输机械手有两种基本类型:平面关节型(SCARA型)和极坐标型(R-θ型)[4,5]。但是,这两种传输结构形式只能实现晶圆的平动传输,不能实现位姿的调整,所以限制了晶圆传输的加速度。因此研究通过调整机械手位姿来提高晶圆传输加速度,对提高传输效率具有重要意义。
1 晶圆传输实验平台
晶圆传输机器人将待加工的晶圆从晶圆盒中取出,经预对准和校准装置进行定位,然后送入相应的工艺设备中加工,加工后将晶圆放入已加工的晶圆盒内[6]。笔者主要通过对自由度的分析,验证所设计晶圆传输机械手是否满足晶圆传输作业要求的平动和转动。通过对机械手进行运动学和动力学分析,检验机械手是否能通过适时调整末端执行器的位姿实现更高的传输加速度,进而有效提高整个系统的传输效率;提高晶圆传输的可靠性和稳定性。利用UG NX8.5软件绘出可位姿调节的晶圆传输机械手实验平台(图1)。

图1 晶圆传输机械手传输平台模型
2 晶圆传输机械手运动学分析
机器人之所以能够按照人类的规划完成给定任务,是因为人类预先对机器人的结构、运动方式、运动轨迹及控制模式等做了特定的设置和限定[7]。机器人运动主要是研究机械手末端的运动(位置、角速度)和关节运动(位置、线速度)之间的关系[8]。基于位姿调整的晶圆传输机械手运动系统坐标系如图2所示,图中所有z轴(z1、z2)均定义为与xoy平面垂直且满足右手定则,而且在图2中表示为垂直水平方向竖直向上。在图2坐标系xoz内第一象限中的粗实线表示晶圆传平台的位置,细实线表示晶圆传输运动系统的坐标系,其中Lx表示机械手臂在直线导轨上水平方向移动的位移,L0为末端执行器支撑构件的长度,θ为末端执行器旋转运动的位姿转角。

图2 机械手运动系统坐标系
2.1 运动学正解
考虑到机械手结构的精简和特殊性,直接采用机械手臂结构的几何关系进行运动学求解。根据各部分的几何关系可以对它进行运动学求解,首先建立支撑构件和末端执行器之间的位移关系,若已知晶圆传输机械手臂的运行位移,且晶圆的中心与末端执行器的中心重合,则可求解末端执行器上晶圆的位置为:
式中Lm——末端执行器的长度;
ωm——末端执行器的角速度。
已知直线导轨上机械手支撑构件的运行速度Vx,求解机械手末端执行器上的晶圆运行速度Vm,鉴于在晶圆传输过程中主要分析其水平状态的运动情况,于是对机械手末端执行器的速度进行分解分析,其速度方程为:
对机械手末端执行器水平方向上的速度方程两边同时求导数,可得晶圆的加速度方程为:

2.2 运动学反解
对机械手运动学反解的求解,首先计算运动系统末端执行器上晶圆的加速度曲线,通过分析晶圆加速度特性与末端执行器的位姿转角关系,推出的末端执行器位姿角度θm的分段函数方程为:
式中a0——末端执行器水平位姿下晶圆所能达到的最大运行加速度;
amax——在末端位姿角度调整下晶圆所能达到的最大加速度;
ax——直线导轨上机械手臂运行的加速度。
根据分析晶圆在末端执行器位姿角度调节下的加速度特性可以求得晶圆加速度与位姿转角的关系,进而求得末端执行器水平运行的加速度ax为:
(1)
式中Af——微结构与晶圆的接触面积;
E——弹性模量;
L——微结构圆柱体长度;
r——晶圆与机械手触区域的当量半径;
t0——加速度达到a0的时间;
α——接触压杆的长度系数;
τ——晶圆传输接触面的剪切强度;
μ——微结构摩擦系数。
对式(1)两端积分,可以得到机械手末端执行器直线运动速度Vx为:
给定晶圆的位置坐标,由逆运动学方程可以求得机械手支撑构件运行的位移Lx为:
由此建立机械手支撑构件和末端执行器之间的位移、速度和加速度关系,即可完成运动学求解。对晶圆传输平台进行运动学分析,可以求解出晶圆在整个运动系统中的传输位移、速度和加速度特性,为分析晶圆传输机械手主动控制方法奠基了理论基础。
3 晶圆传输机械手动力学分析
在满足晶圆传输机械手运动约束条件下,建立的晶圆传输机械手动力学模型如图3所示。同运动学分析一样,可以把机械手的支撑构件和末端执行器看成图3所示的AB、BC,且看成是质心均匀分布于几何中心的理想杆件,A为机械手基座的中心点,B0为支撑杆件的质心,C0为末端执行器的质心,mi为杆件i的质量,Ii为杆件i的转动惯量。由运动模型简图可知,支撑杆件AB只有沿水平做往复平动,末端执行器BC可做位姿调整转动。

图3 晶圆传输机械手动力学模型
已知支撑构件和末端执行器的长度,由图3可得末端执行器的质心C0的坐标为:
(2)
对式(2)求导可得C0点的速度:
其中V0为支撑杆件水平运动速度。根据速度合成法即可得到VC0的计算式:

建立了晶圆传输运动平台的坐标系之后,系统的动力学状态用拉格朗日函数L描述,L、K、P分别代表拉格朗日函数、系统功能和系统势能,即:
L=K-P
则拉格朗日力学基本方程可以用运动的所有外力之和F、转动的所有外力之和T与系统能量x表示,拉格朗日方程如下:
对于该晶圆传输运动平台,其支撑构件相当于连杆1,末端执行器与连杆1之间由转动关节传动装置连接。设连杆1的质量为M1,末端执行器的质量为Mm,则二者的动能分别为:
求得整个运动系统的总动能K为:

根据坐标系的定义,还可以求解运动系统的总势能P:


总之,建立动力学方程对保证晶圆传输机械手优良的动态特性和静态特性起到了很大的作用,对其运动精度、可靠性等性能提供了重要的理论意义,更为研究其主动控制方法奠基了基础。
4 晶圆传输机械手运动学仿真
在UG中建立三维模型,通过一些必要的简化导入ADAMS,接下来在ADAMS中建立机械手支撑构件与直线导轨之间的移动副、晶圆与末端执行器之间的移动副、直线导轨与大地之间的固定副等,然后对晶圆传输运动平台进行运动学仿真计算。调用仿真后处理模块ADAMS/Post process,得到晶圆、末端执行器和其他构件的位移、速度及加速度等特性曲线[9,10]。
根据理论计算,晶圆在水平位姿下传输的最大加速度可达4.36m/s2,但由于摩擦力受多种因素影响,而且加速度影响因素较为复杂,所以仿真结果略大于理论分析值。从图4所示的仿真曲线可以看出,末端执行器的加速度可以逐渐增大到5.00m/s2,而晶圆在加速度达到4.62m/s2之后不能与末端执行器保持同步运动。
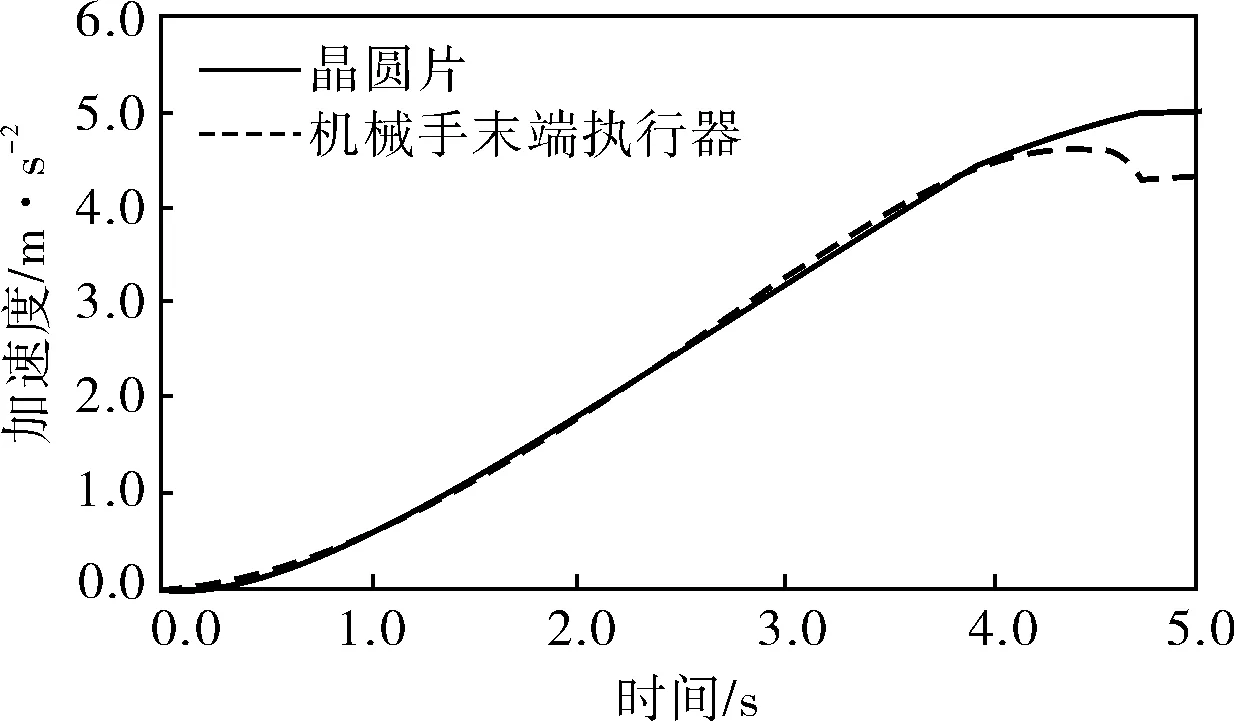
图4 ADAMS仿真末端执行器与晶圆的加速度曲线
图5为水平位姿下晶圆与末端执行器的位移仿真结果。初始阶段,晶圆与末端执行器的位移曲线重合,说明两者之间没有发生相对滑动,并且能够保证晶圆的可靠传输;当运动到图中分叉点位置时,晶圆与末端执行器的位移曲线偏离,之后两条曲线不再重合,说明晶圆与末端执行器发生了相对滑动,不能保持同步传输运动。

图5 ADAMS仿真末端执行器与晶圆的位移曲线
重新设置加速度驱动函数,改变晶圆传输位姿,在晶圆传输平台最大传输加速度达到15.00m/s2的条件下进行运动学仿真,结果如图6所示。可见,通过末端位姿角度的调节,能够有效提高晶圆传输的加速度,晶圆与末端执行器同步运动的加速度达到9.62m/s2。
图7为位姿调节下晶圆和末端执行器的传输位移曲线,可以看出,晶圆与末端执行器的位移曲线重合,表明在位姿角度调整的基础上,能够有效提高晶圆传输的可靠性,防止晶圆发生滑移。

图6 位姿调节下晶圆传输加速度曲线

图7 位姿调节下晶圆传输的位移曲线
通过以上运动学仿真对比分析,采用传统水平位姿传输方式,晶圆传输的最大加速度明显受到限制,加速度增大会导致晶圆出现滑移;在末端执行器位姿调节的情况下,晶圆传输的最大加速度约为9.62m/s2,而且能够防止晶圆滑移,保证晶圆的可靠传输。所以,调节末端执行器的位姿角度可有效提高晶圆传输的加速度,即实现高加速晶圆传输运动。
5 结束语
提高晶圆传输系统效率,保证晶圆片的平稳传输与精确定位是目前晶圆传输机器人的研究重点。笔者以验证所设计的晶圆传输机械手是否满足晶圆传输的可行性、稳定性、可靠性以及为研究晶圆高效传输的主动控制方法为目的,对机械手进行运动学和动力学分析,分析结果表明:可以准确求解晶圆传输运动平台的位移、速度、加速度以及作用力之间的关系,并且可以求解出行运动学以及动力学方程,而且在晶圆传输过程中适时调整末端执行器的位姿可以实现更高的传输加速度,进而有效地提高了整个系统的传输效率、传输可靠性和稳定性。
[1] 郭东明,康仁科,金洙吉.大尺寸硅片的高效超精密加工技术[C].中国机械工程学会2001年年会论文集.北京:机械工业出版社,2002:35~40.
[2] 汪劲松,朱荒.我国“十五”期间IC制造装备的发展战略研究[J].机器人技术与应用,2002,(2):5~9.
[3] Zuberek W M.Cluster Tools with Chamber Revisiting-Modeling and Analysis Using Timed Petri Nets[J].IEEE Transactions on Semiconductor Manufacturing,2004,17(3):333~334.
[4] Fusaro D.Teach Your Robots Well[J].Control Design Magazine,2003,21(5):26~29.
[5] Cong M,Yu X,Shen B J,et al.Research on a NovelR-θWafer-Handling Robot[C].Proceedings of the IEEE International Conference on Automation and Logistics.Piscataway,NJ:IEEE,2007:597~602.
[6] 丛明,于旭,徐晓飞.硅片传输机器人的发展及研究现状[J].机器人技术与应用,2007,(4):18~23.
[7] Wang J,Chung H,Wu H.Evaluating the 300mm Wafer-Handling Task in Semico-Nductor Industry[J].International Journal of Industrial Ergonomics,2004,34:459~466.
[8] 郑小飞.晶圆传输机器人平稳精确轨迹控制技术[D].哈尔滨:哈尔滨工业大学,2009.
[9] 程将.基于微观界面粘附机理的晶圆传输机械手控制方法研究[D].上海:上海工程技术大学,2016.
[10] 罗阿妮,张家泰,刘贺平.利用ADAMS仿真分析五自由度机械手[J].计算机仿真,2005,22(7):201~203.
KinematicsandDynamicsAnalysisofWaferTransferManipulatorBasedonPositionAdjustment
GONG Yong-jia, SONG Fang
(EngineeringPracticeandTrainingCenter,ShanghaiUniversityofEngineeringScience)
The wafer transfer manipulator platform with position adjustment was established. Through analyzing the degree of freedom, it’s proved that manipulator can satisfy translational and rotational requirements of the wafer transmission; and through kinematic analysis, the kinematics equation of the manipulator was established; through the dynamics analysis based on Lagrange method, the dynamic mathematical model was deduced and its accuracy was verified.
wafer transfer manipulator, position adjustment,wafer,kinematics analysis, dynamics analysis
国家青年科学基金项目“基于微结构阵列的高摩擦低粘附晶圆高效传输机理与主动控制方法的研究”(51505273)。
龚永佳(1992-),硕士研究生,从事晶圆传输机械手主动控制方法的研究,gongyongjia168@163.com。
TH89
A
1000-3932(2017)12-1147-05
2017-07-20,
2017-10-18)
《化工自动化及仪表》征稿简则
1.专业范围
报道化工、石油化工、冶金、电力、医药、造纸、纺织等行业过程控制理论与应用、计算机技术及其应用、检测技术研究与应用、控制装置设计及应用、仪器仪表技术开发与应用、企业技术改造经验等。
2.报道内容
◆综述与评论。博采众览,兼收并蓄,及时、准确、全面地反映国内外过程控制技术、检测技术、计算机技术及仪器仪表技术的发展动态、趋势和水平。著文要求准确性和权威性,信息量大,能够较全面地阐明命题的过去、现状及发展。
◆过程控制。报道现代控制理论的研究与应用,新型控制策略及控制技术的应用实例;先进控制系统及控制装置的现场应用;国家重大科技攻关项目及成果。
◆检测与仪表。报道国内外先进的检测技术、自动化仪器仪表技术的开发与应用。
◆研究与应用。报道控制技术、检测技术、计算机技术、仪器仪表技术等的研发及其在工业生产中的应用。
◆技改与创新。报道技术改造和技术成果,系统及仪表的日常检测与维修经验等,著文要求突出实用性。
3.投稿要求
◆文稿应简明扼要,突出重点,公式、数据准确。
◆要求E-mail投搞,一律为Word文档(A4幅面,单倍行距,通栏,五号字体),不受理复印稿或传真稿。
◆每篇文章请附150~200字中、英文摘要,4~6个中、英文关键词,作者所在单位的中、英文名称。
◆若条件允许,每篇文章请附中图分类号(分类方法请参考《中国图书馆分类法》第四版)。
◆图、表要有图题、表题,图中文字、符号、数字、图注需清楚,图、表中标注尽量用中文。
◆公式另行居中书写,大/小写、上/下标标注清楚。
◆为使您的稿件能够被及时处理,投稿时请务必提供每位作者的详细信息,包括邮编、联系地址、工作单位、电话等。
4.稿件受理
◆来稿收到后即以电子邮件方式给以回复,并分配稿件登记号,以便于查询。
◆投稿后若有变动(如撤稿,作者通讯地址、联系方式改变等),请务必通知编辑部。
◆审稿周期为15个工作日。
◆刊物出版后,向作者赠送两本当期刊物。
