基于浮力调节系统的AUV定深悬浮控制
2018-01-10孙庆刚安家玉
孙庆刚 ,郑 荣 ,安家玉 ,杨 博 ,杨 斌
(1.中国科学院沈阳自动化研究所 机器人学国家重点实验室,辽宁 沈阳 110016;2.中国科学院大学,北京 100049)
随着人类对海洋资源开发利用的不断加大,AUV(autonomous underwater vehicle)具有越来越广泛的应用前景,长航时、低能耗是AUV的主要发展方向之一[1]。AUV的定深悬浮是无航速的深度和纵倾控制,能够使AUV在某一深度实现无动力悬停,达到虚拟锚泊,以便进行长时间的定点观测[2]。AUV的定深悬浮可以通过艏、艉槽道推进器和浮力调节系统两种方式实现。依靠槽道推进器实现定深具有动态响应快、结构简单等优点,但是在定深过程中需要推进器持续地工作,从而会消耗大量可贵的能源;依靠浮力调节实现定深能够长时间维持状态稳定,但是由于浮力改变需要一定的时间,导致动态响应较慢,同时,浮力调节系统相比槽道推进器,结构相对复杂。依靠浮力调节系统定深相对于槽道推进器方式,可减少用电量,增加了水下航行时间。因此,研究AUV基于浮力调节系统的定深悬浮具有重要的意义。
中科院沈阳自动化研究所郑荣等提出了将浮力调节系统应用于作业型AUV上,本文在此基础上调整油囊的数量和分布,研究温度对浮力调节系统的影响以及无模型定深控制策略等[3];韩志刚等人将无模型控制方法应用于硝酸铵生产等大复杂时滞系统控制中,控制效果明显优于PID控制,本文借鉴其控制策略,将无模型控制方法应用于AUV的定深悬浮控制[7-8]。
针对AUV的定深悬浮问题,本文设计、开发了一套浮力调节系统和定深悬浮控制程序,通过无模型反馈控制方法控制浮力调节单元,达到定深悬浮和实现姿态控制。湖上试验结果表明,设计的控制策略可以很好地实现AUV的定深悬浮。
1 浮力调节系统基本原理
浮力调节系统的基本原理:AUV浮力调节系统可分为容积式和重力式两种。容积式浮力调节系统主要是在不改变AUV自身重量的条件下,改变AUV的排水体积使其浮力状态发生变化,实现浮力调节;重力式浮力调节系统主要是在不改变其排水体积的条件下,改变AUV自身的重量使其浮力状态发生变化,实现浮力调节[3]。
本文采用的是容积式浮力调节系统,由前后配置的两个浮力调节单元组成。每个浮力调节单元在AUV的耐压舱内外各设置一个油囊,通过液压回路实现内、外油囊之间的传油,液压回路如图1所示。液压回路通过换向阀实现内、外油囊之间的油量传输,所传输的油量通过流量计获得[4]。
当油囊中的油液由内油囊流向外油囊时,AUV的重力不变,排水体积变大,浮力增加;反之重量不变,排水体积变小,浮力减小[5]。
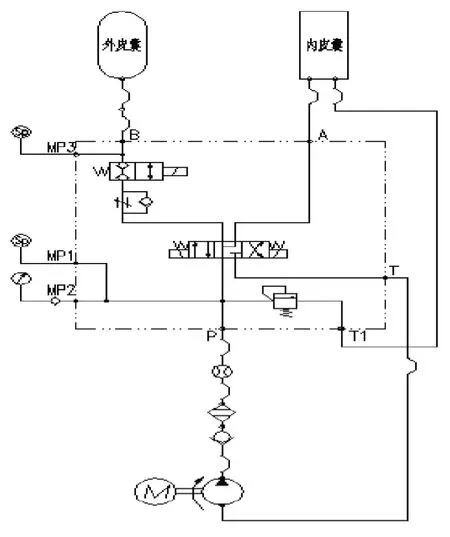
图1 浮力调节单元液压系统原理图
2AUV定深控制
2.1 无模型反馈控制方法
无模型控制理论与方法是指控制器的设计仅利用受控系统的I/O数据,控制器中不包含受控过程教学模型的任何信息的控制理论与方法[6]。
无模型控制器是一种结构自适应控制器,打破了参数自适应的限制,它的设计依赖的是“泛模型”:

式中:y(k)是系统的输出;u(k)是系统的输入;φˆ(k)是特征参量;在此模型中能够变化且实现自适应的只有特征参量φˆ(k),当系统处于稳定状态时,φˆ(k)是 y(k)关于 u(k-1)的梯度。
无模型控制的控制规律为:

式中:α是小正常数,限制了控制输入的变化;ρ是控制的增益,也是灵敏度,它实际上是偏差y0-y(k)的放大或缩小倍数,初始值一般取成1。
无模型控制律的基本算法是由“泛模型”式(1)的辨识算法和基本控制算法式(2)在线交互进行而组成的,从而实现辨识与控制的一体化[7-8]。
2.2 定深控制策略
在AUV入水后,调整AUV艏、艉外油囊的油量,使 AUV 处于负浮力状态,即:ΔB=B-P<0(B 为AUV浮力,P为AUV的重力),在此过程中,AUV以深度计作为反馈元件实时控制调整艏、艉外油囊的排油量以调整AUV在水中的姿态,从而使AUV能够在设定的深度实现定深悬浮,控制原理图如图2所示[9]。
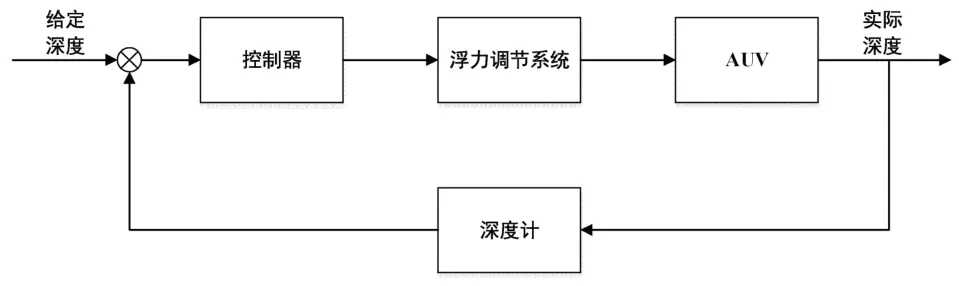
图2 定深控制策略原理图
AUV定深悬浮的实现不仅需要控制AUV的深度,同时还需要调整AUV的姿态。如果只对深度进行控制,由于水流的变化,或者外界环境因素的干扰,很可能会使AUV出现大的纵倾而下潜,从而无法实现定深悬浮,深度和纵倾角复合控制逻辑如图3 所示[10]。
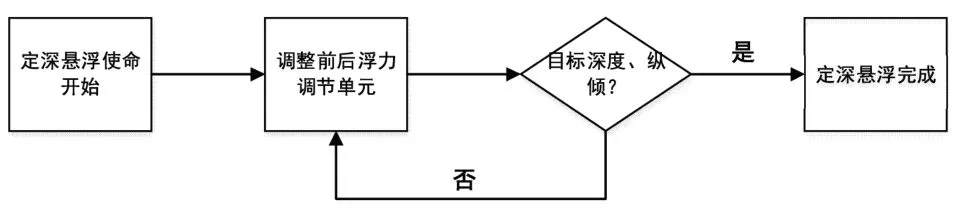
图3 深度和纵倾角复合控制逻辑图
在此控制中,理想的目标深度误差即为(2)式中的控制器设定值y,AUV在定深过程中的实际深度即为y(k),理想目标深度即为系统输入u(k),深度计实时反馈AUV的实际深度,控制器通过不断控制浮力调节系统内外油囊油量,使AUV在目标深度误差范围内实现定深。
3 湖上试验验证
浮力调节系统湖上试验的主要目的是验证浮力调节系统可靠性,温度对流量的影响,定深控制策略以及控制程序可行性。
3.1 试验用AUV概况
2016年12月在杭州千岛湖进行了湖上试验,基于浮力调节系统的AUV是在在其艏艉配装浮力调节舱段,浮力调节舱段的位置与原槽道推进器位置相同,如图4所示,AUV基本参数如表1。
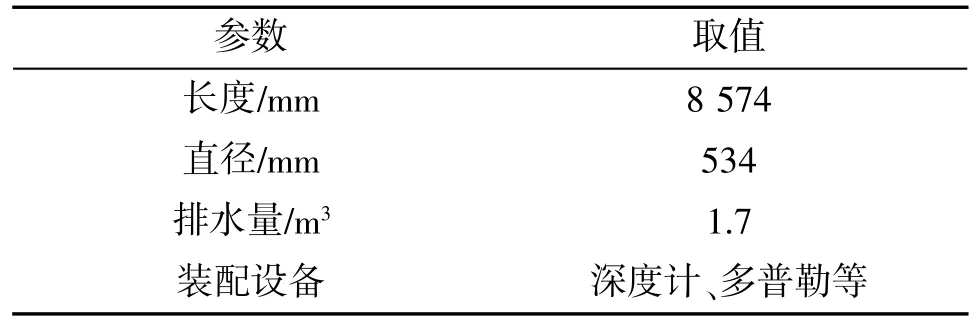
表1AUV基本参数
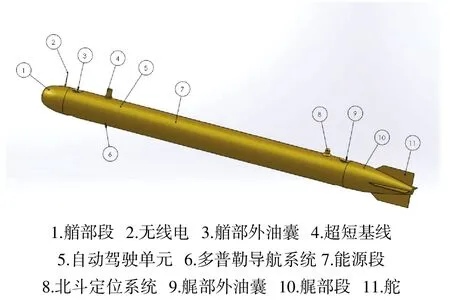
图4 AUV组成示意图
3.2 温度与流量的关系
环境水温的大小、AUV工作时间的长短、AUV的工作深度等会使浮力调节单元液压系统内油液的温度发生变化,油液温度等对浮力调节系统的排油量有很大的影响[11],液压油的粘度对温度的变化十分敏感,当温度升高时,液压油分子的内聚力减小,会使其粘度变小[12]。
为实现良好的使命规划,需要准确掌握温度与系统流量的对应关系,图5为不同温度下对应的浮力调节系统流量值,由此可知,随着温度的升高,浮力调节系统的流量不断增大。通过所测得的温度与流量对应数据回归出两者之间的关系式为:

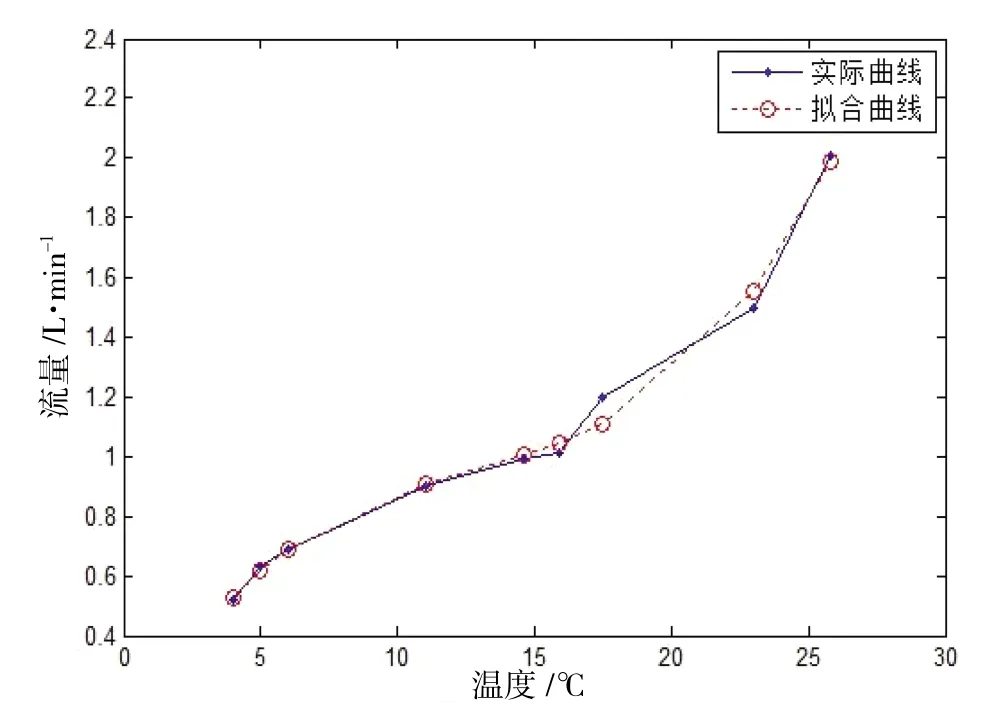
图5 温度与流量变化曲线
图6为浮力调节系统在10.2℃下的流量变化曲线,图7为浮力调节系统在14.6℃下的流量变化曲线。从两种温度下系统的流量变化曲线可以得知,温度高时,系统的流量会增大,但是流量均值与图5显示的值有所差别,这是因为AUV在水下航行时,深度会对浮力调节系统的流量大小产生一定的影响。
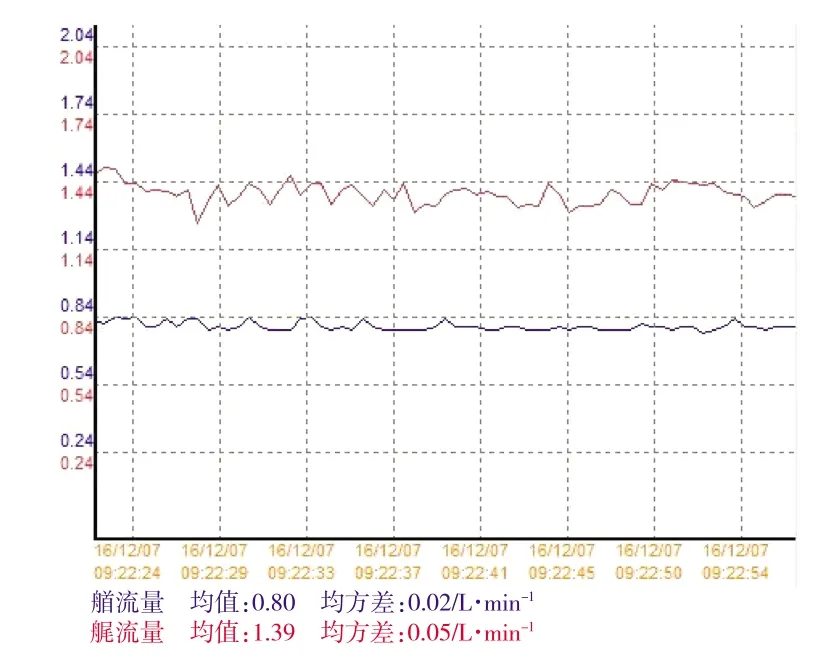
图6 10.2℃下浮力调节系统流量
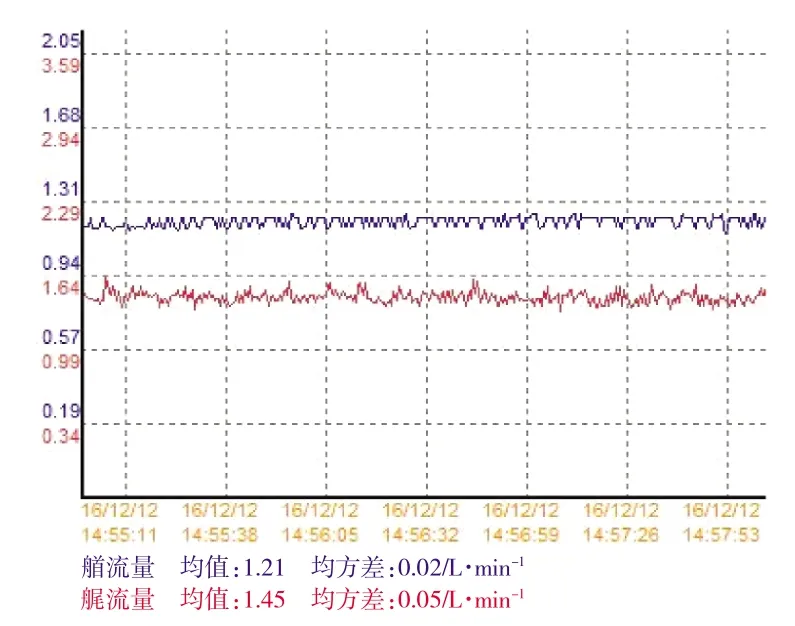
图7 14.6℃下浮力调节系统流量
3.3 定深悬浮验证
AUV在定深3 m,10 m的过程中,艏、艉浮力调节系统需要同时工作,通过内、外油囊之间的传油,调整AUV在水下的浮力状态,实现定深悬浮,图8为定深3 m时AUV深度变化曲线;图9为定深10 m时AUV深度变化曲线。
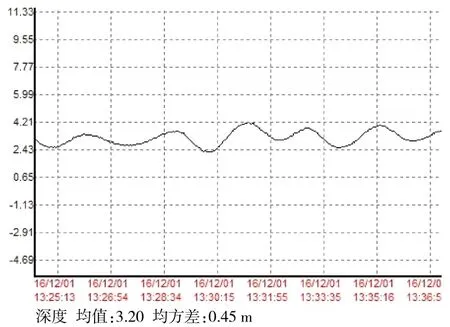
图8 定深3 m时深度变化曲线

图9 定深10 m时深度变化曲线
从定深3 m,10 m的深度变化曲线可以看出,定深3 m的过程中深度均值为3.20 m,均方差为0.45 m;定深10 m的过程中深度均值为10.40 m,均方差为0.40 m,两种定深情况的误差均在工程应用允许的范围之内,因为系统流量、水流等都会对AUV的姿态产生影响,同时,由于AUV惯性大,从而影响定深的实现,小的深度误差不可避免。依靠无模型反馈控制能够使AUV实现定深悬浮,满足工程需要,但是在定深过程中艏艉浮力调节系统外油囊的油量一直在变化,还没有达到最理想的效果,外油囊油量变化如图10所示。
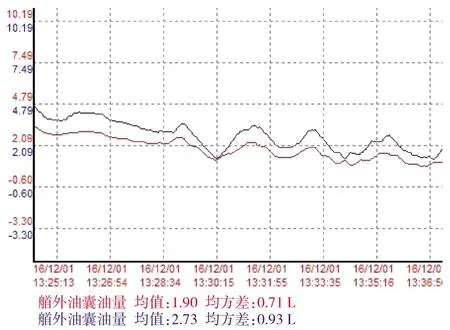
图10 定深3 m时艏艉外油囊油量变化
3.4 能耗情况比较
湖上试验中,对配置槽道推进器和浮力调节系统的AUV采用相同的控制方法分别进行了定深悬停试验。试验结果表明浮力调节配置悬停精度低于槽道推进器配置0.2 m左右,在工程允许范围内。
依靠浮力调节系统定深过程中主要的工作设备为液压阀、电机和控制器;依靠槽道推进器定深过程中主要的工作设备为推进器和控制器。通过试验测得的这些设备的工作电压电流等参数,可以对比两种定深方式的耗能情况,试验结果如表2所示。

表2 工作参数
由表2的相关数据可以得知,浮力调节系统所有工作设备的功率为120.96 W,小于槽道推进器所有设备的功率194.4 W,因此,在相同的工作时间下,依靠浮力调节系统实现定深悬浮比依靠槽道推进器更加节省能源。
4 结论
本文主要讨论了油囊式浮力调节系统、AUV定深悬浮、定深悬浮控制策略、温度与流量关系以及湖上验证。湖上试验验证了油囊式浮力调节系统能够取代槽道推进器,AUV依靠艏、艉浮力调节系统能够实现定深悬浮,定深3 m的均方差为0.45 m,定深10 m的均方差为0.40 m,误差均在合理范围之内,满足实际需要;同时,通过试验可以验证温度对浮力调节系统的流量具有一定的影响,为系统的工作提供了可靠的数据支持,具有很大的实用价值。
浮力调节系统相比槽道推进器,可以一定程度上节约能源,符合AUV的发展方向,试验验证了依托浮力调节系统实现定深悬浮的可行性,对浮力调节系统的实用化具有很大的价值。从浮力调节单元外油囊油量变化曲线可以看到,此控制方法在实现定深的过程中仍在不断地进行油量调整,仍有继续改进和优化的余地,在以后的工作中在满足任务需求的基础上,不断优化控制策略,最大限度地降低系统能耗,延长工作时间,提高系统性能。
[1]蒋新松,封锡盛,王棣棠.水下机器人[M].辽宁:辽宁科学技术出版社,2000.
[2]齐宵强.潜器悬浮运动模型及控制方法研究[D].哈尔滨:哈尔滨工程大学,2008.
[3]郑荣,常海龙.浮力调节系统在作业型AUV上的应用研究[J].微计算机信息2006,22(9):207-212.
[4]Sekhar T,John D.A Variable Buoyancy Control System for a Large AUV[C]//IEEE Journal of Oceanic Engineering,2007,762-771.
[5]李建朋.水下机器人浮力调节系统及其深度控制技术研究[D].哈尔滨:哈尔滨工程大学,2010.
[6]侯忠生.无模型自适应控制的现状与展望[J].控制理论与应用,2006,23(4):586-592.
[7]薛荆岩,巫红,韩志刚.无模型控制方法在复杂大时滞系统控制中的应用研究[J].自动化技术与应用,2004,23(4):1-6.
[8] 薛荆岩,涂磊,韩志刚.无模型控制方法性能分析[J].控制工程,2009,16(5):531-534.
[9]王雨,郑荣,武建国.基于浮力调节系统的AUV深度控制研究[J].自动化与仪表,专题研究(4):2015,6-10.
[10]张勋,边信黔,唐旭东,等.AUV均衡系统设计及垂直面运动控制研究[J].中国造船,2012,53(1):28-36.
[11]赵文德,李建朋,张铭钧,等.基于浮力调节的AUV升沉运动控制技术[J].南京航空航天大学学报,2010,42(4):411-417.
[12]王荣林,殷劲松.基于液压油油温对液压系统性能影响的研究[J].中国科技信息,2008,24:104.
