基于PC104的遥控多功能水下机器人控制系统研究
2018-01-10王光越陶元中
胡 测,张 皓,王光越,陶元中
(中船重工第七一〇研究所,湖北 宜昌 443003)
随着世界进入“海洋时代”,海洋争夺进入白热化,世界各国对海洋装备越来越重视,纷纷抢占海洋装备的制高点,从而赢得先机。水下机器人是海洋观测,水下作业的重要载体和平台,是重要的海洋工程装备,现成为各国的研究热点[1-2]。在水下机器人研究领域中,国内外学者已经成功地开发出不少水下机器人产品应用于工程实践[3]。遥控机器人(ROV)是水下机器人的重要一种,主要用于各种沉物的搜索打捞。此外还应用于港口、航道勘察、大坝检修、海洋科考、海洋仪器的运载和定点布放以及水下作业等领域[4]。
本文设计的遥控水下机器人是一种多功能、模块化水下机器人,主要用于水下目标探测、大坝检修、水下打捞、水文观测以及海洋传感器的搭载试验。该机器人采用模块化设计,由综合控制模块、探测识别模块、能源模块、电力分配模块、打捞作业模块以及载荷模块构成。上述模块独立成舱体或系统,通过水密电缆连接,合理布置于框架上,可根据需要快速重构机器人。
1 遥控多功能水下机器人系统
1.1 系统总体构成
遥控多功能水下机器人采用框架式结构,可利用探测识别模块实现水下探测,利用打捞作业模块配置的五功能液压机械手和专用打捞工具开展水下精细作业、轻载打捞、重载打捞等任务,还可根据实际需求利用剩余浮力(设计剩余浮力150 kg)和空间,调整载荷模块快速构建其他需求机器人,因此该机器人具有多功能性。机器人系统如图1。
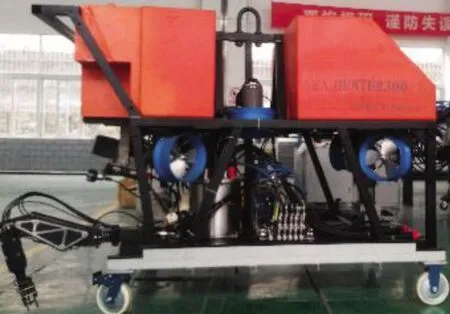
图1 遥控多功能水下机器人
1.2 基于PC104的模块化综合控制系统
遥控多功能水下机器人要实现水下作业多样性,功能模块化,则要求综合控制系统不仅有高性能、高可靠性、结构灵活的硬件,还需高性能运动控制的软件,以有效控制分布在各位置的传感器动作以及机器人运动。综合控制系统采用模块化设计思想,以总线为通信标准,通过水密接插件与其他模块互联通信。
为保证综合控制模块的控制性能,设计了以PC104为核心的综合控制模块,外围配置串行总线通讯模块、模数转换模块、继电器组模块实现串行通信、A/D采集、开关量I/O、D/A输出、继电器控制等功能,从而完成电源检测与管理、图像采集与识别、姿态控制、航行控制、机械手控制等任务[5]。遥控多功能水下机器人传感器众多,各传感器设备与主控制器之间多采用网口或串口进行信息交互。遥控多功能水下机器人大部分传感器有自己的处理器,能进行自身故障诊断,将诊断结果传送给主控制器。主控制器根据故障等级与类型进行相应的应急处理。综合控制模块控制原理如图2。
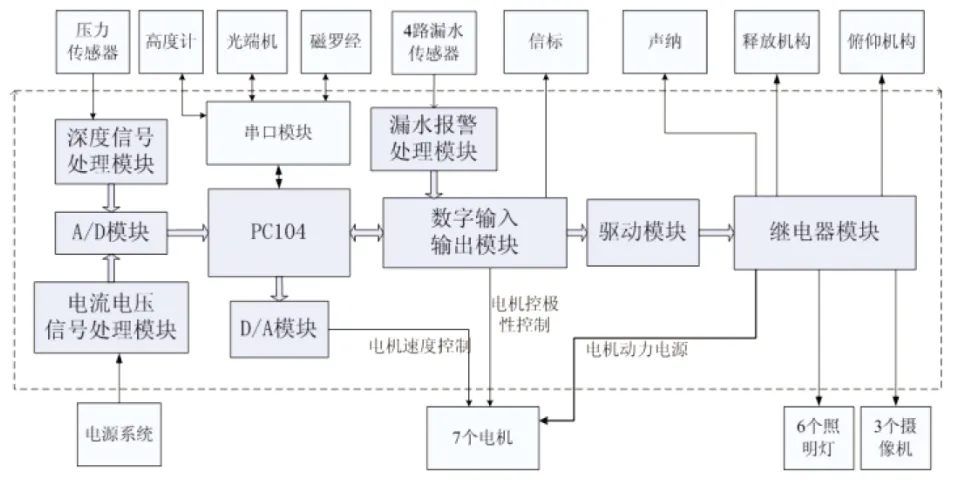
图2 遥控多功能水下机器人综合控制系统结构
1.3 推进模块
为减少机器人水平运动与垂直运动的耦合以及附加运动带来的综合控制模块设计难度,保证机器人的水平运动能力,水平方向采用四推进器环形45°矢量布置,以兼顾机器人的前进、后退、左右平移,转弯的机动性能和运动速度。垂直方向上以重心线为对称轴,60°对称布置两个推进器,保证系统垂直运动的平稳[6]。推进器布置方式见图3。
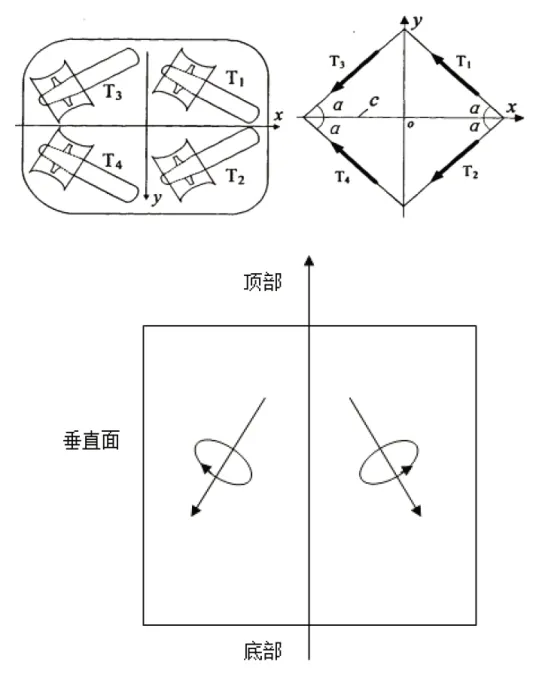
图3 遥控多功能水下机器人推进系统布局
2 基于PC104的自动控制器设计
自动控制能力是遥控水下机器人的重要性能指标。综合控制模块通过设计合理的控制器实现航向、深度的自动控制,保证控制器要有较强的鲁棒性、较优的控制能力。
2.1 深度PID控制器设计
水下机器人的定深控制系统是深度计反馈的电流信号经过电流环采集、AD转换变成深度信号,控制系统将采集的深度信号转换成深度数据。设定工作深度后,控制系统实时将设定值与当前值比较,将结果输入到深度控制器,控制器通过算法运算后输出调节参数,控制系统根据参数调节垂直推进器转速与转向,使机器人稳定在预定深度[7-8],控制器如图4。
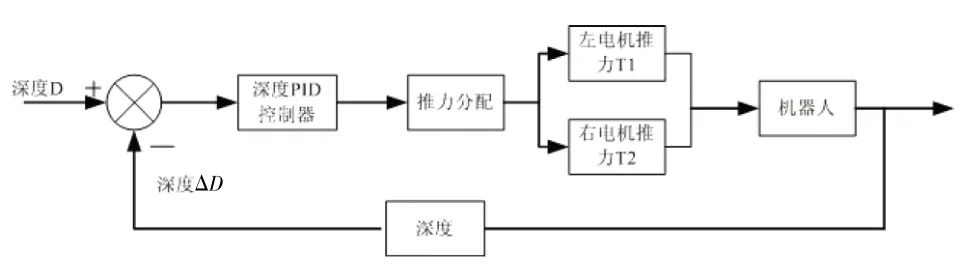
图4 深度控制器原理图
图中ΔD为深度差值,当深度与预设值发生偏差时,自动通过PID控制器修正深度控制推进器转速和方向。PID控制器调节公式为:

式中:kp,ki,kd为 PID 控制器参数;D0为目标深度;Di为当前深度;Di-1为前一次深度;Di-2为前两次深度;通过调节kp,ki,kd的值可以使深度控制器响应快速、深度保持稳定。试验中首先在静水中调节参数kp,使深度变化响应达到最优并减小稳态误差,之后在扰动环境下调节参数kd,使深度控制器收敛速度最优。参数kp,kd确定后调节参数ki,增强控制器鲁棒性,通过调节最优PID参数为:kp=10,kd=5,ki=5。
2.2 航向PID控制器设计
航向控制精度是水下机器人的重要参数,遥控多功能水下机器人的航向角由磁罗经输出。控制系统实时采集机器人航向角,并将设定航向角与采集值实时比较,计算结果输入航向控制器,航向控制器输出结果后控制系统依据结果控制水平电机的转速与转向,实现航向自动控制[9-11]。航向控制器如图5。
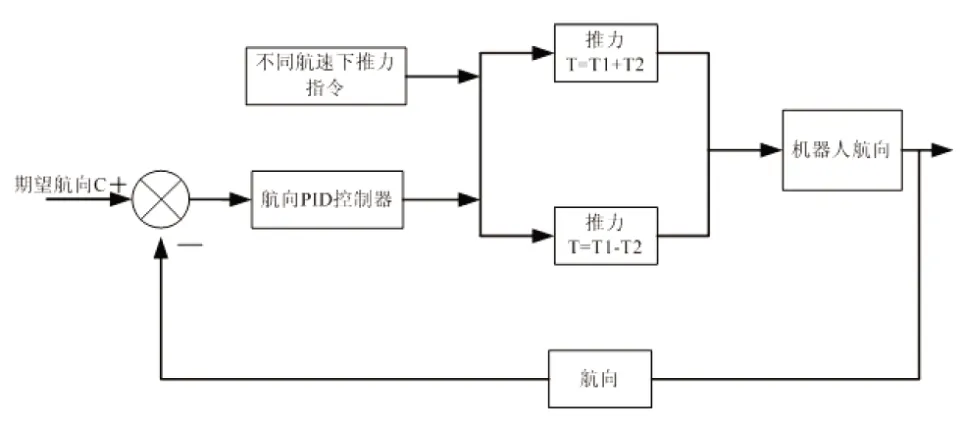
图5 航向控制器原理图
本文采用增量式PID控制器,PID调节公式如下:
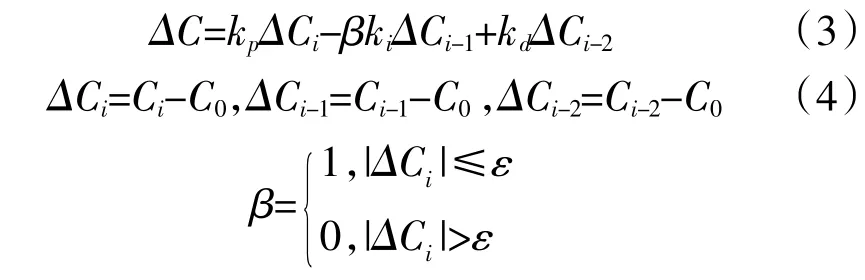
式中:kp,ki,kd为PID控制器参数;β为调节系数;C0为目标航向;Ci为当前航向;Ci-1为前一次深度航向;Ci-2为前两次航向。根据试验数据设定一航向偏差阈值,当航向偏差较大时采用PD控制,当航向偏差较小时采用PID控制,以增强航向控制器的收敛性和鲁棒性。先在静水中调节参数kp使控制器收敛性达到最优,再在由水流扰动情况下调节参数kd提高控制器收敛速度,通过湖上复杂水环境试验调节参数ki增强控制器鲁棒性,通过试验最优的PID 参数为:kp=20,kd=5,ki=15。
3 航行控制试验
水下机器人的运动控制性能是实现其他功能的重要基础,也是检验控制器设计是否合理的重要依据。为了验证遥控多功能水下机器人控制性能,开展了湖上试验和海上试验。
3.1 深度控制能力试验
设定机器人水下航行深度3 m,开启自动定深功能,使机器人在水下保持深度航行,航行时间120 min,控制系统实时控制机器人航速并记录航行深度数据。实时深度变化见图6。
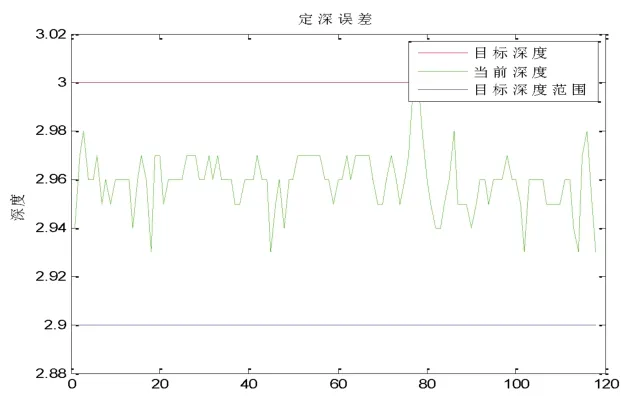
图6 机器人深度变化曲线图
试验数据可以看出,设定机器人航行深度为3 m,机器人深度保持在2.95~3.05 m,定深误差为0.05 m,深度控制器具有良好的调节能力。
3.2 航向控制能力试验
航向控制器能力试验首先测试机器人静态情况下航向控制器控制能力,机器人布放于湖上开阔水域,开启定向航行功能,使机器人保持一定速度航行,控制系统实时记录机器人航向角。静态测试试验完毕后,测试航向控制器动态航向控制能力,机器人布放于湖上开阔水域,开启定向航行功能,不断调整机器人定向航行角度和航行速度,控制系统实时记录机器人航向角。试验中发现当航向控制器控制水平4个推进器时,航向角受变化剧烈,收敛速度较慢,且大大影响航行速度,为此航向控制器只控制艏向两个水平推进器,将艏向推进器作为航向调节推进器,尾部两个推进器为航速推进器,航向角变化见图7。
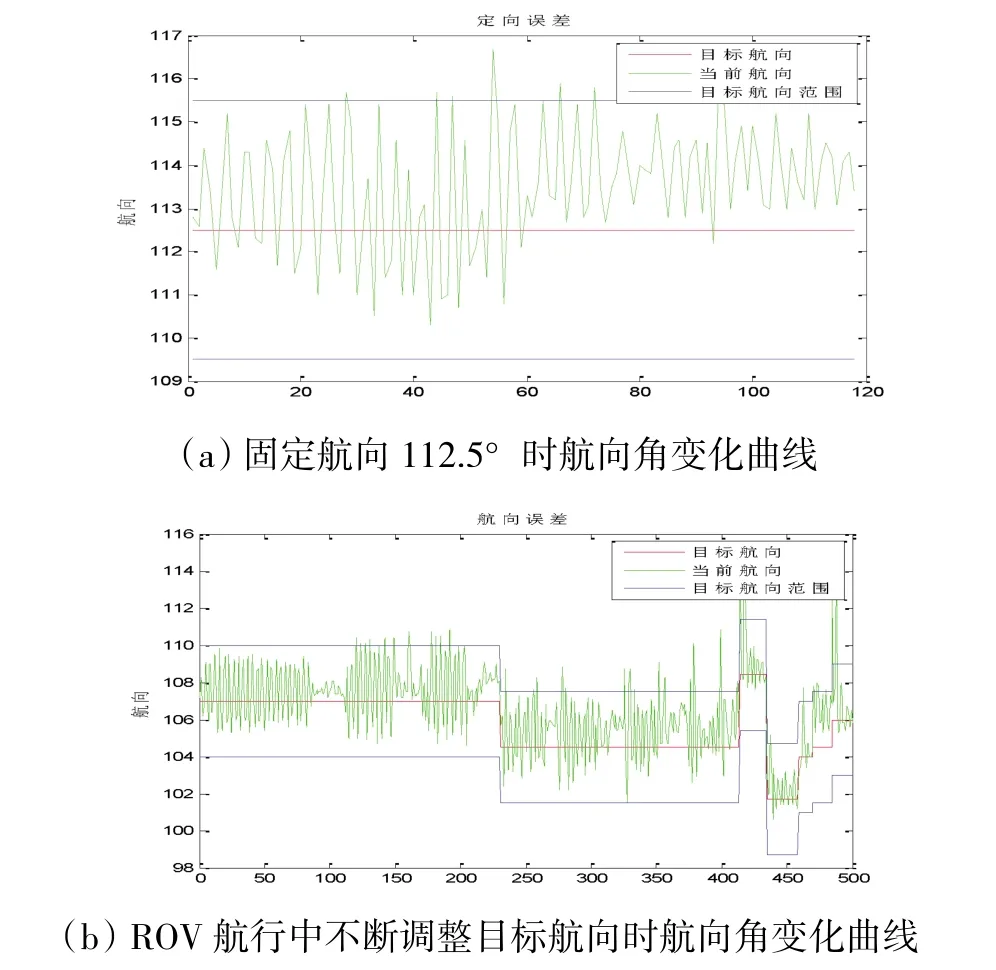
图7 ROV定向航行时航向变化曲线
试验数据可以看出,该机器人静态水下航行时,航向角与目标值基本保持一致,由于水流扰动机器人航向产生一定波动,但总体误差范围为-2°~+3°,且变化周期较大。
为进一步验证综合控制模块自动控制航向的能力开展机器人动态航向测试。遥控机器人全速航行并不断调整目标航向角(见图7(b)中红色线条),此时,尾部脐带电缆长度快速增加,迎流面积增大,脐带电缆阻力快速增大,同时全速航行时水流扰动增加,导致航向角剧烈波动,但当航向控制器逐渐收敛后,航向角趋于稳定,与设定目标航向误差稳定在-3°~+3°之间,且航向角变化平缓,收敛速度较快,表明航向控制器具有良好的航向控制能力。
3.3 航行性能试验
选择开阔水域,控制系统设定机器人定向航行,保证机器人直线行驶,逐渐将机器人电机转速增大,实时记录机器人速度、功率,以及推进器转速,测试机器人航行性能,试验数据见图8。
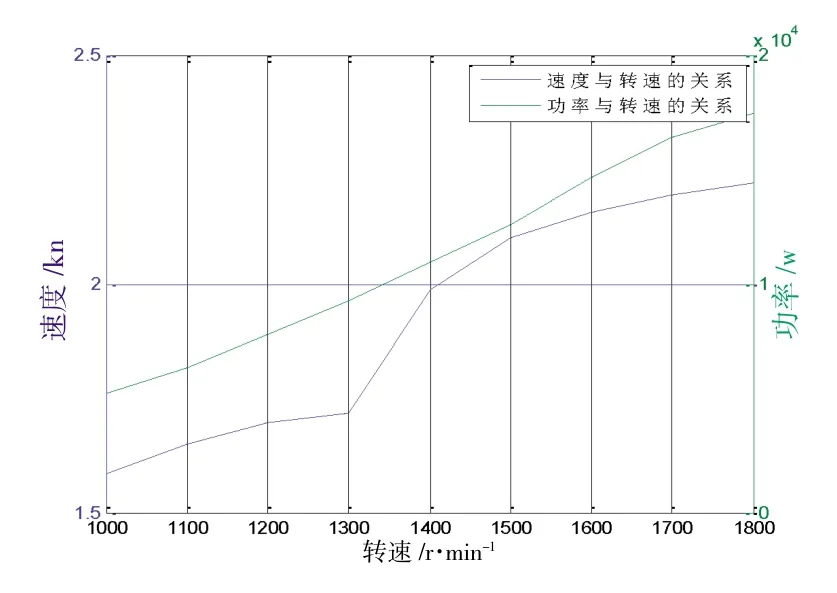
图8 速度、功率、推进器转速关系曲线
试验数据显示机器人航行速度与推进器转速成正比关系,当推进器达到最大转速1 800 r/min时机器人达到最大速度。当机器人速度小于2 kn时,机器人系统功率与速度正相关,当速度微过2 kn时系统功率急剧增大。该试验数据为该类型机器人推进系统设计提供了一定的参考。
4 结论
本文针对框架式遥控机器人智能控制问题研制了一种可满足水下探测、大坝检修、水下打捞、海洋仪器搭载的遥控多功能机器人。针对智能控制难题,将机器人多输入输出控制系统分解成两个互不耦合的航向控制与深度控制系统,减小控制算法设计难度,并通过设计深度控制器和航向控制器实现自主控制。针对航向控制的复杂性,设计了分离式PID控制器以提高控制器的收敛速度和鲁棒性。试验结果表明,控制系统能够在侧向移动、升沉运动和直线航行中保持较好的控制精度。
[1]刘芙蓉,陈辉.自主式水下潜器研究开发综述[J].舰船科学技术,2008,30(5):20-23.
[2]徐玉如,李彭超.水下机器人发展趋势[J].自然杂志,2011,33(3):125-132.
[3]徐玉如,庞永杰,甘永等.智能水下机器人技术展望[J].智能系统学报,2006,1(1):9-16.
[4]魏延辉,田海宝,杜振振,等.微小型自主式水下机器人系统设计及试验[J].哈尔滨工程大学学报,2014,35(5):566-570.
[5]査智,卢海洋.运用PC104和分布式CAN总线的智能AUV设计[J].重庆理工大学学报,2013,27(8):97-100.
[6]陶元中,赖建云,王归新,等.打捞器设计报告[R].中船重工第710研究所,2015.
[7]KRAUT W K,SWIENCINSKI H J.Reliability of the mark 7 mod 3 arresting gear[R].American:AD-845390,968.
[8]刘春媚.遥控式水下机器人运动控制技术的研究[D].哈尔滨:哈尔滨工程大学,2007,19-21.
[9]万磊,张英浩,孙玉山,等.基于重构容错的智能水下机器人定深运动控制[J].兵工学报,2015,36(4):723-729.
[10]白灵.特种ROV设计与控制方法研究[D].哈尔滨:哈尔滨工程大学,2009:51-53.
[11]刘慧婷,冯金金,张明.水下机器人操纵系统优化控制研究[J].计算机仿真,2015,33(5):299-303.
