基于多Agent的玻璃堆垛控制系统的建模与仿真
2018-01-09陈薇,金晶,李鑫
陈 薇, 金 晶, 李 鑫
(合肥工业大学 电气与自动化工程学院,安徽 合肥 230009)
基于多Agent的玻璃堆垛控制系统的建模与仿真
陈 薇, 金 晶, 李 鑫
(合肥工业大学 电气与自动化工程学院,安徽 合肥 230009)
针对现代制造系统生产控制过程的复杂性和动态性,文章提出了以多Agent系统的分布式结构作为生产组织和运行模式。基于多Agent的理论,建立了光伏玻璃自动堆垛控制系统的模型,以及根据有限状态机理论对Agent进行自动机描述。通过Simulink/Stateflow对模型进行仿真,仿真结果表明,基于多Agent的光伏玻璃自动堆垛控制系统能够很好地满足生产控制的动态性、实时性,对现代制造生产效率的提高具有重要意义。
生产控制;多Agent;有限状态机;Stateflow软件
现代制造系统是高度分散的开放式系统,为了响应市场需求的变化及制造系统本身内部的一些不确定性因素,如突发的生产订单、交货期的提前与滞后、设备故障、某些资源的短缺和引入等,生产计划与控制必须是动态变化的[1]。多 Agent 技术是一种分布式的人工智能技术,融合了诸如分布式计算、人工智能等先进的理论技术。多Agent系统采用分布式的处理方式,能够将一个复杂的问题转化成几个小问题来处理,通过各Agent成员之间的共同协商,能够动态协调生产过程控制活动,自主调整制造系统中个体的行为,对产品变化、设备故障、生产节拍的改变等事件作出智能反应[2]。同时,基于多Agent的生产过程控制表现出连续和离散并存的混杂特性,本文采用有限状态机理论从控制角度对Agent结构进行研究,得出其一系列受控性能,把Agent工作过程几个不同的阶段划分出几种不同的工作状态,并将这些状态集成为一个具体的有限状态机,采用有限状态机的图形工具Stateflow实现基于多Agent的玻璃自动堆垛控制系统的运行过程性能分析,方便获得设备运行状态等数据分析结果。
1 Agent的结构及自动机描述
1.1 Agent的个体结构
Agent可以指一个具有自治能力的、能够自适应的、以认识与模拟人类某种智能行为为目标的硬件、软件或其他实体。作为智能体,应具有自治能力、社交能力、反应能力以及主动性,能够感知周围的环境,自治地运行,并能够影响和改变环境[3-4]。智能体由3个基本部分组成,如图1所示。
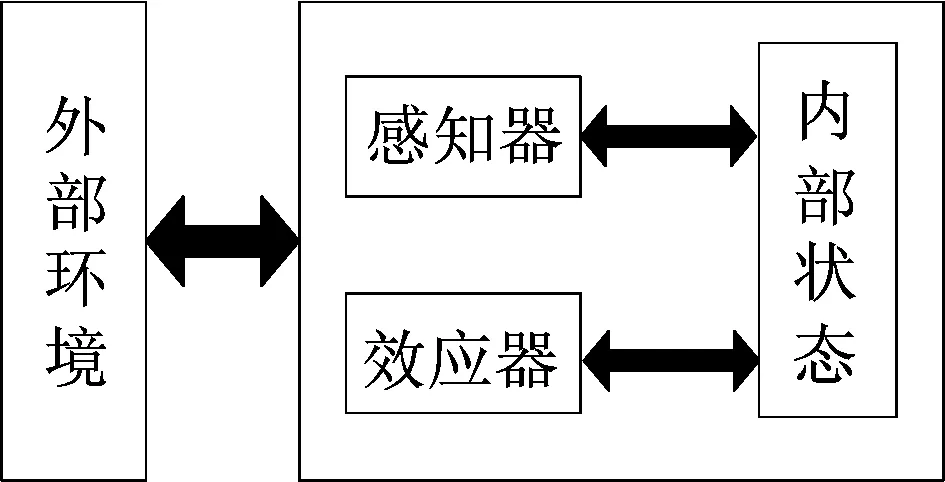
图1 Agent的个体结构
Agent都有一个感知器来感知外部环境,能根据环境的状态来改变自己的结构和内部状态,同时通过一个效应器作用于外部环境,改变外部环境的状态。从Agent 的模型结构可以看出,对于 Agent 的决策模块部分,它实际上可以用带状态的Agent的计算结构来描述,通过选取行为包含结构模块的计算结构来开发 Agent 能够产生行为的模块,该模块包含了增强的有限状态自动机的分布式网络,它可以执行一个特定的行为并且能和其他模块进行通信。通过计算结构可以得出其状态转移图,因此涉及到有限状态自动机的问题。根据离散事件动态系统的 RW 理论(自动机及形式语言理论),把每一个Agent 可以看作一个有限状态自动机,从而可以用自动机理论从控制角度对 Agent 内部结构进行研究,得出其一系列受控性能。基于上述关系不仅可以对分布式制造提出功能需求,还可以通过自动机理论和 RW 监控理论来实现其控制需求,并把两者紧密结合起来,从而使所构建的系统能同时满足功能需求和控制需求,使系统具有优化集成、快速重组、动态调度等特点[5]。
1.2 Agent的自动机模型
基于RW理论把每一个层次的 Agent 均作为一个有限状态机来进行处理,从控制角度对Agent的内部结构用有限状态机的模型来描述。
有限状态机 (finite state machine,FSM) 可以被称为事件驱动系统,是指一个系统中存在有限个状态,当有事件触发时,系统就会从一个状态转换到另一个状态[6]。有限状态机是一种思路简单、结构清晰、设计灵活的方法,能解决复杂的监控逻辑问题,具有很强的事件驱动控制能力。1个简单的有限状态机示意图如图2所示。
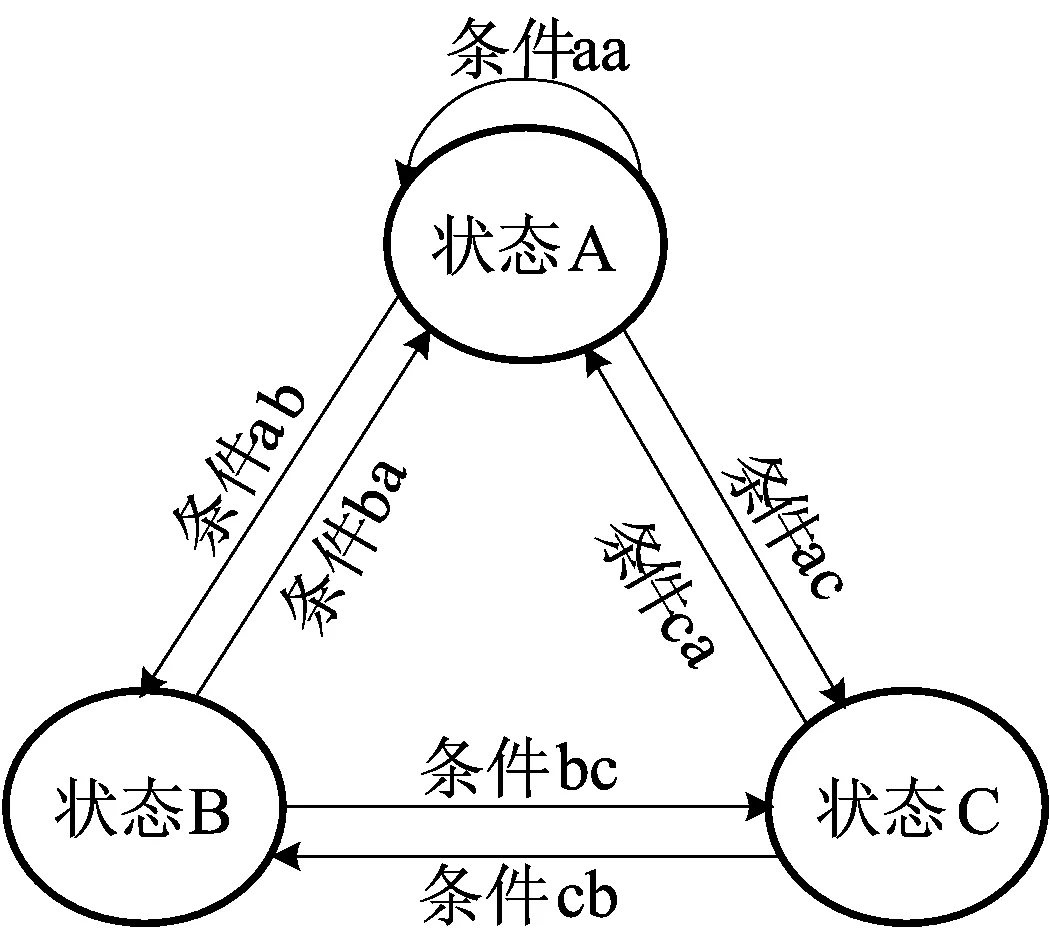
图2 有限状态机示意图
通常,1个 FSM 包括有限状态集、输入集、输出集和状态转移规则集,可用数学模型表示为:
M=(S,I,O,F,G,S0),
SK+1=F(SK,IK),
OK=G(SK,IK)
(1)
其中,S为有限状态集;I为输入集;O为输出集;F为状态转移函数;G为输出函数,代表系统初始状态;SK、IK、OK分别为在K时刻的系统状态、输入信号和输出信号。由数学模型可知状态变化由事件所触发,事件可以是系统内部信号或外部输入信号。当前系统状态被事件触发后,会执行相应的动作。系统的输出由当前的状态和输入决定,系统的输出特性是通过状态转换表现出来的[7-8]。
1.3 多Agent系统的混合体系结构
为了解决单个Agent不能解决的复杂问题,多Agent系统是由多个Agent组成的一个多Agent联邦,这些Agent成员之间相互协同、服务,共同完成一个任务。各个Agent成员的活动相对较为独立,不受其他Agent限制,一个Agent出现问题对其他Agent的运行影响较小[9]。多Agent的体系结构主要有集中式结构、分布式结构以及混合式结构。多Agent的混合式结构体系如图3所示。
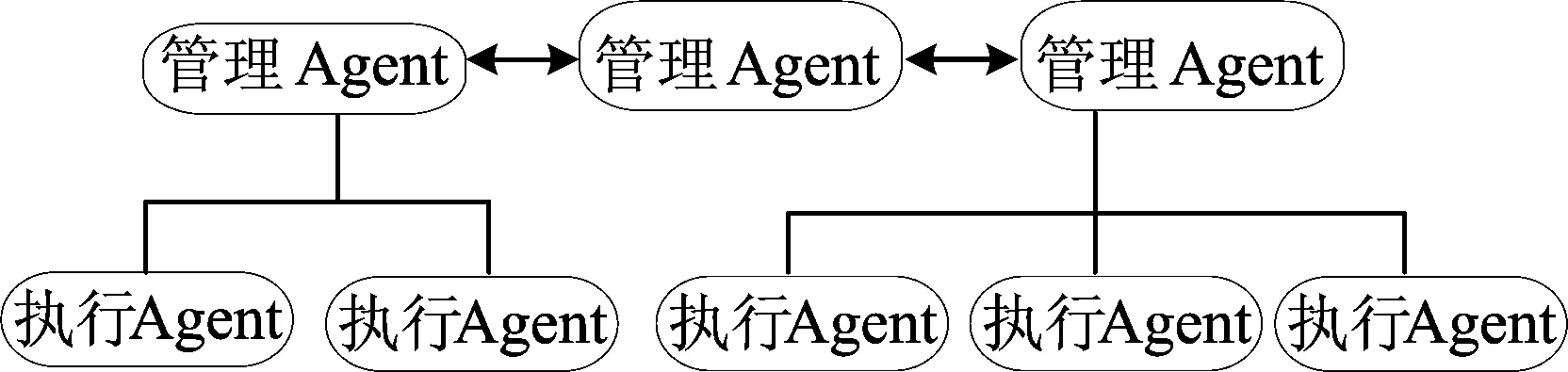
图3 多Agent系统的混合式体系结构
每个管理Agent与其下面的执行Agent构成独立的多Agent子系统进行集中控制,各执行Agent独立运行,单个执行Agent的故障不影响其他执行Agent的运行,所有执行Agent由所在系统的管理Agent统一控制。各多Agent子系统充分自治,只有上层Agent进行交互,这样大大减少了通信复杂度,混合多Agent的系统结构均衡了集中式与分布式控制的优缺点。
2 基于多Agent的光伏玻璃生产线模型
2.1 光伏玻璃原片生产工艺流程
光伏玻璃原片生产工艺复杂,由多个生产车间共同完成玻璃原片的生产任务,主要流程如图4所示。
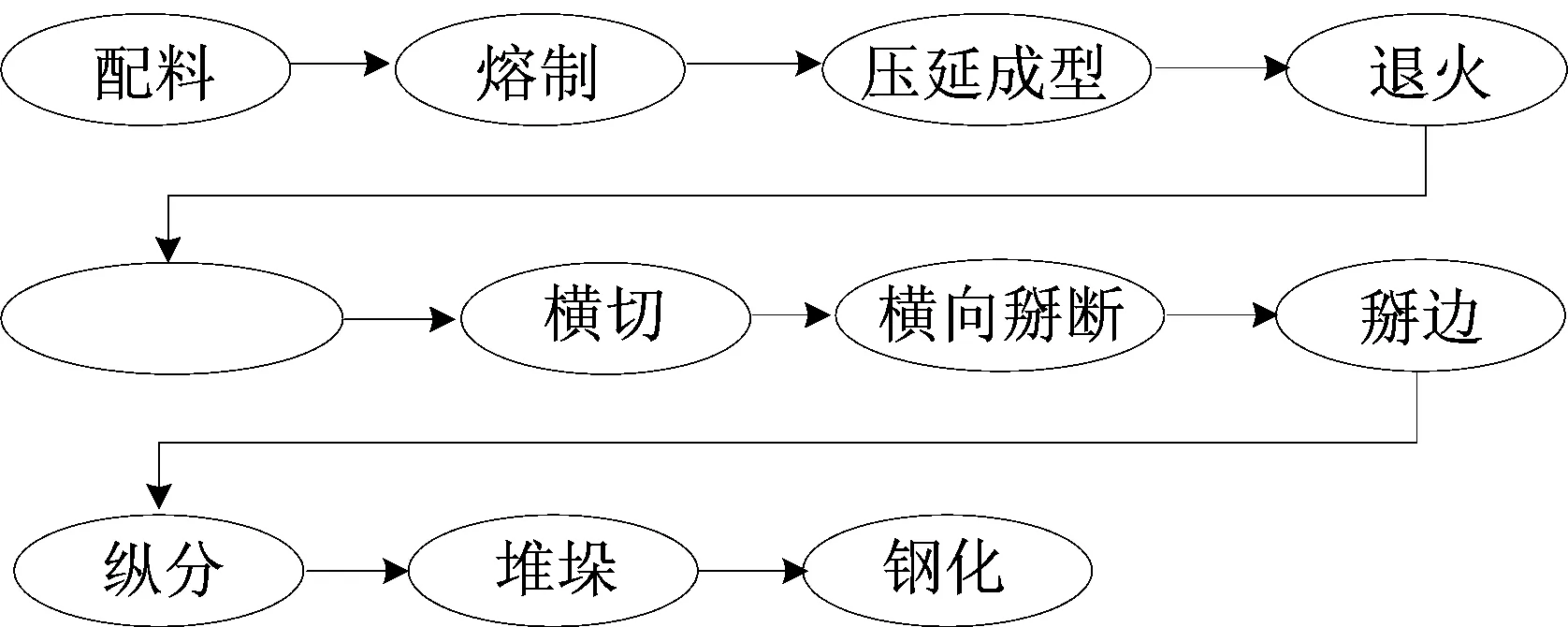
图4 玻璃原片生产工艺流程
2.2 光伏玻璃生产线的多Agent系统
Agent是一个运行于动态环境中的具有自治性、社会能力、响应能力和能动性的智能实体,由于其对环境的适应性和对不完全信息的处理能力,使其具有能实时规划、推理和搜索的能力,从而适应生产系统建模的需求。结合玻璃生产的工艺流程,采用多Agent混合式体系结构,构造出的玻璃生产线的多Agent模型如图5所示。玻璃生产线的多Agent系统模型将玻璃生产系统分为厂级Agent、车间级Agent、单元级Agent、执行设备Agent。
以玻璃堆垛子系统分析,该子系统主要完成玻璃的堆垛,及时取走辊道上的玻璃。主要执行设备有提升机、行车、小车1和小车2,由提升机、行车控制玻璃堆垛过程中的位置移动,小车装载运输玻璃,小车1上堆垛的玻璃片数达到设定值时自动退出堆垛区回到等待位进行卸载,处于另一等待位的小车2立刻行至堆垛区继续装载玻璃。根据面向Agent的建模方法,将各执行设备一一映射为提升Agent、行车Agent、小车1Agent、小车2Agent4种反应型Agent。同时建立一个慎思型堆垛单元Agent作为控制Agent,根据内部的控制算法和对外部环境的感知,统一控制与管理堆垛子系统中的各执行设备Agent,并且该堆垛单元Agent与冷端车间的其他单元Agent相互协作,共同完成冷端车间Agent分配的任务。

图5 光伏玻璃生产线的多Agent系统
2.3 玻璃堆垛系统的Agent自动机模型
前面提到根据有限状态机理论对Agent进行自动机描述,以行车Agent为例用有限状态机的模型来描述,行车Agent的自动机运行特性描述如图6所示。
由Agent的自动机模型可知,行车Agent的状态变化由事件所触发,事件可以是行车Agent的内部信号或外部输入信号。当前状态被事件触发后,会执行相应的动作。行车Agent的输出由当前的状态和输入决定,行车Agent的输出特性是通过状态转换表现出来的。其他Agent的自动机模型同理,在这里就不一一详细描述。
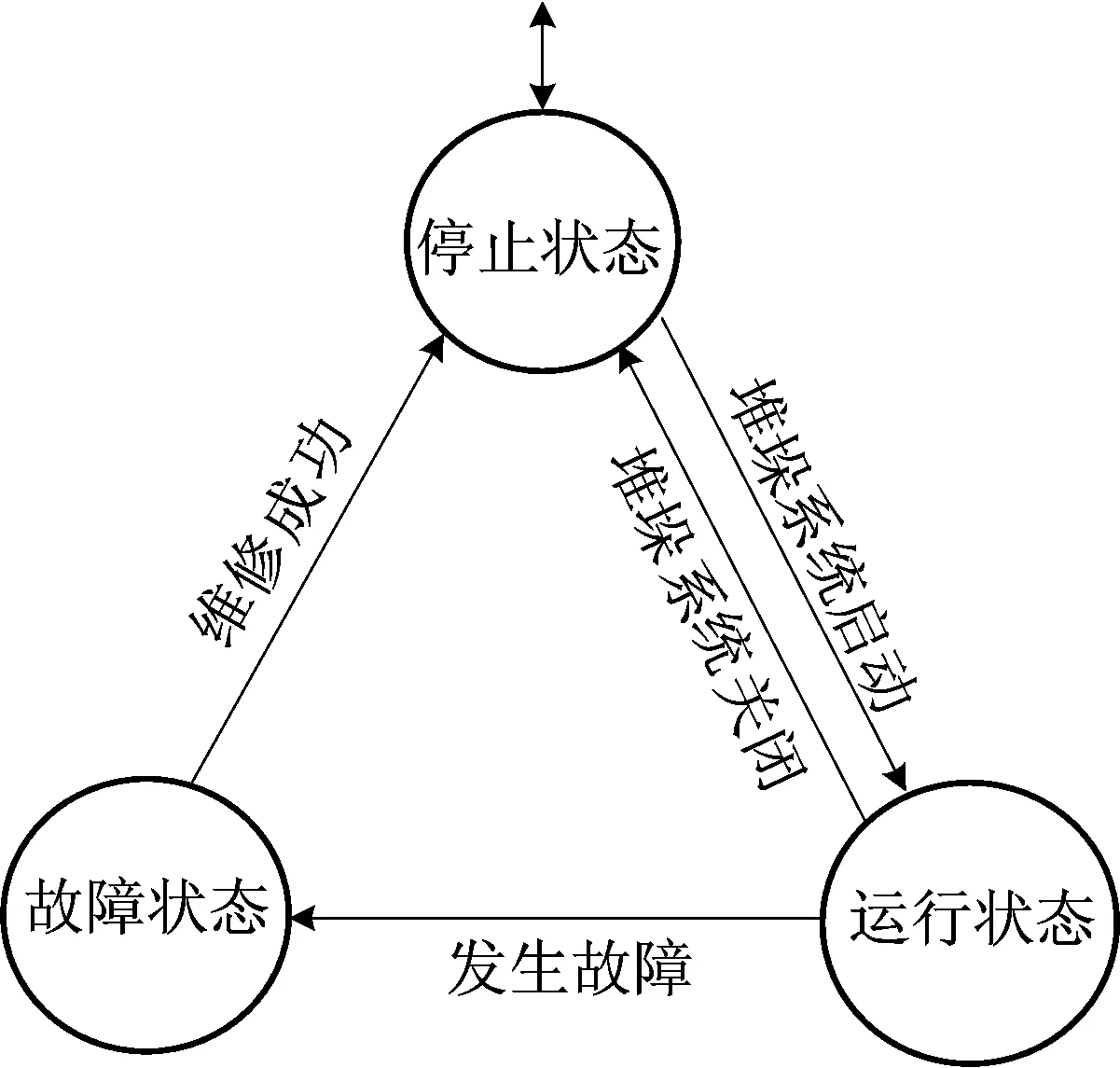
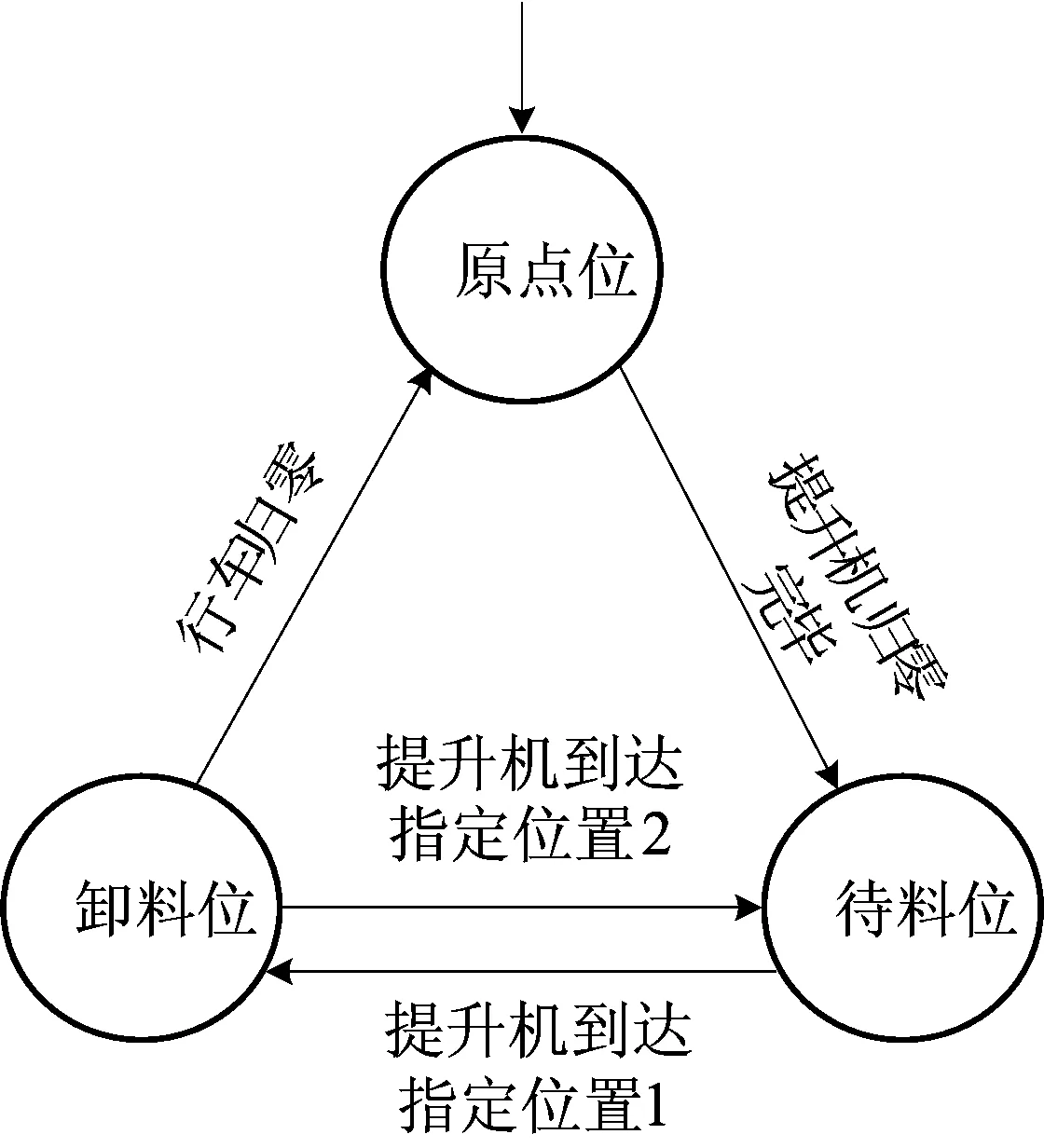
(a)(b)图6 行车Agent的自动机模型描述
3 仿真实验
3.1 基于Stateflow的仿真搭建
根据RW理论把每一个层次的Agent均作为1个有限状态机来进行处理。Stateflow是有限状态自动机的图形工具,因而可以利用Stateflow实现多Agent系统的仿真分析。它可以用于解决复杂的逻辑问题,用户可以通过图形化工具实现在不同状态之间的转换。在StateFlow的仿真窗口中,允许用户建立有限个状态以及状态转移的条件与事件,从而可以绘制出有限状态自动机系统,这样就可以实现对系统的仿真。StateFlow的仿真框图一般都会嵌入到Simulink仿真模型中,实现状态转移的条件或事件即可以取自StateFlow仿真框图,也可以来自Simulink仿真模型[10]。
本文对光伏玻璃冷端车间的自动堆垛单元Agent子系统的进行仿真,模型如图7所示。该子系统分别构建了堆垛单元Agent、提升机Agent、行车Agent、小车1Agent、小车2Agent模型。堆垛单元Agent作为控制Agent,初始化提升机Agent、行车Agent的等待位、抓取位、卸料位等位置坐标,根据自身的决策模块以及来自传动系统送来的玻璃到位节拍,对提升机Agent、行车Agent、小车1Agent、小车2Agent进行统一实时调度与控制。4个执行Agent听从堆垛单元Agent的调度,并实时向其反馈自己的运行状态。
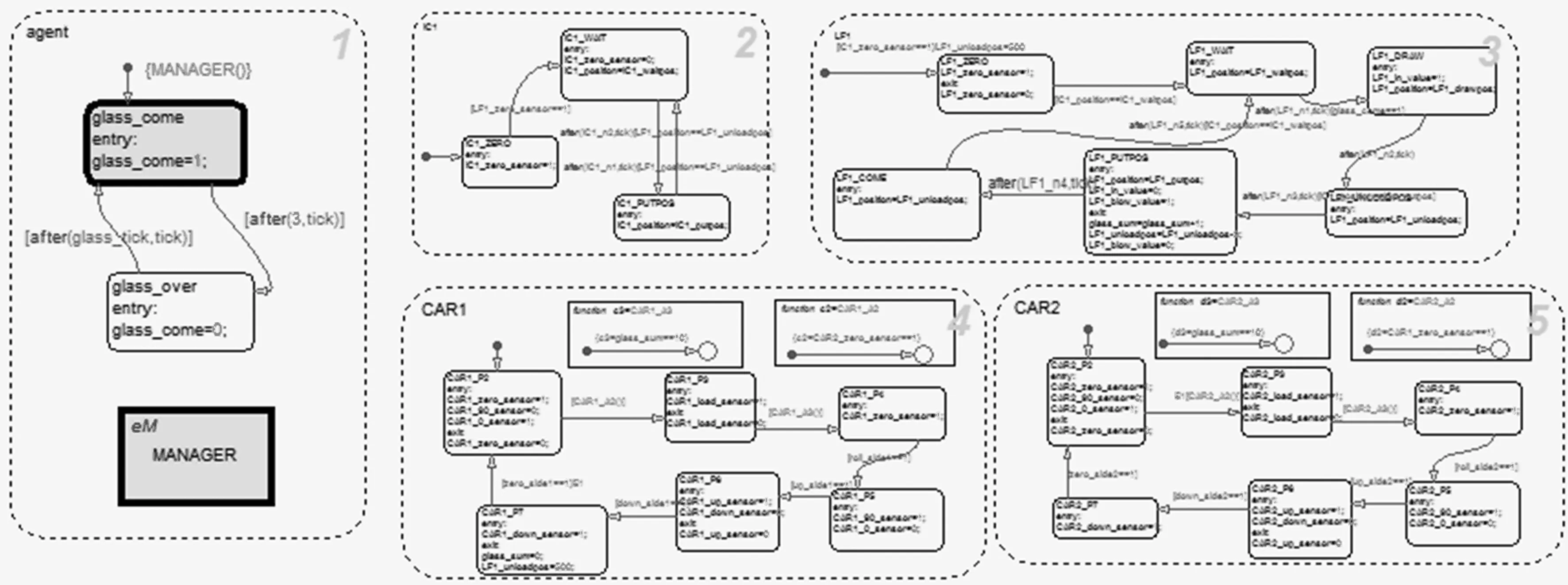
图7 自动堆垛单元Agent子系统仿真模型
3.2 仿真结果
运行该系统模型后,可以实时观察到各Agent的运行状态。小车1Agent各传感器到位信号以及当前玻璃堆垛片数如图8所示。
玻璃生产节拍为15s/片时的行车、提升的实时位置与玻璃到位信号如图9所示。从图9中可以看出,提升、行车的动作节拍满足玻璃生产节拍,能够及时将辊道上的玻璃取走。
订单突然增加,玻璃生产节拍改为6s/片,玻璃生产节拍6s/片时重调度前运行状态如图10a所示。从图10a中可以看出,行车与提升如果按照之前的动作节拍运行,玻璃到位信号出现2次,提升机和行车只堆垛了1次,这样会出现玻璃堆积,来不及抓取的现象。为了适应当前的玻璃生产节拍,堆垛单元Agent根据下面的提升Agent和行车Agent的反馈数据以及从外界接收的玻璃的生产节拍,通过自身的决策模块,实现对其执行Agent的实时调度。通过修改提升Agent和行车Agent各个动作节拍,最终满足了系统要求,如图10b所示。
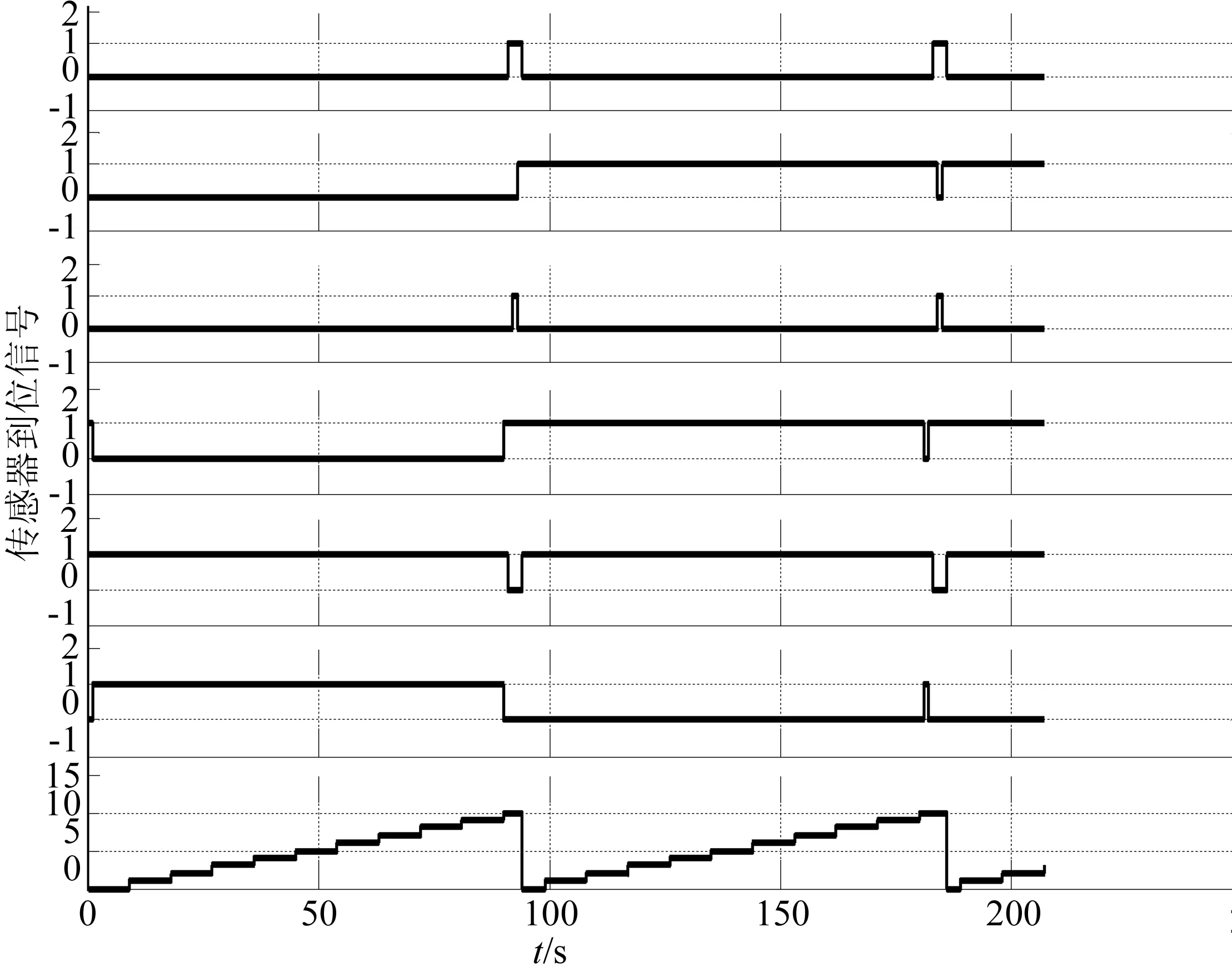
图8 小车上各传感器信号及玻璃堆垛片数
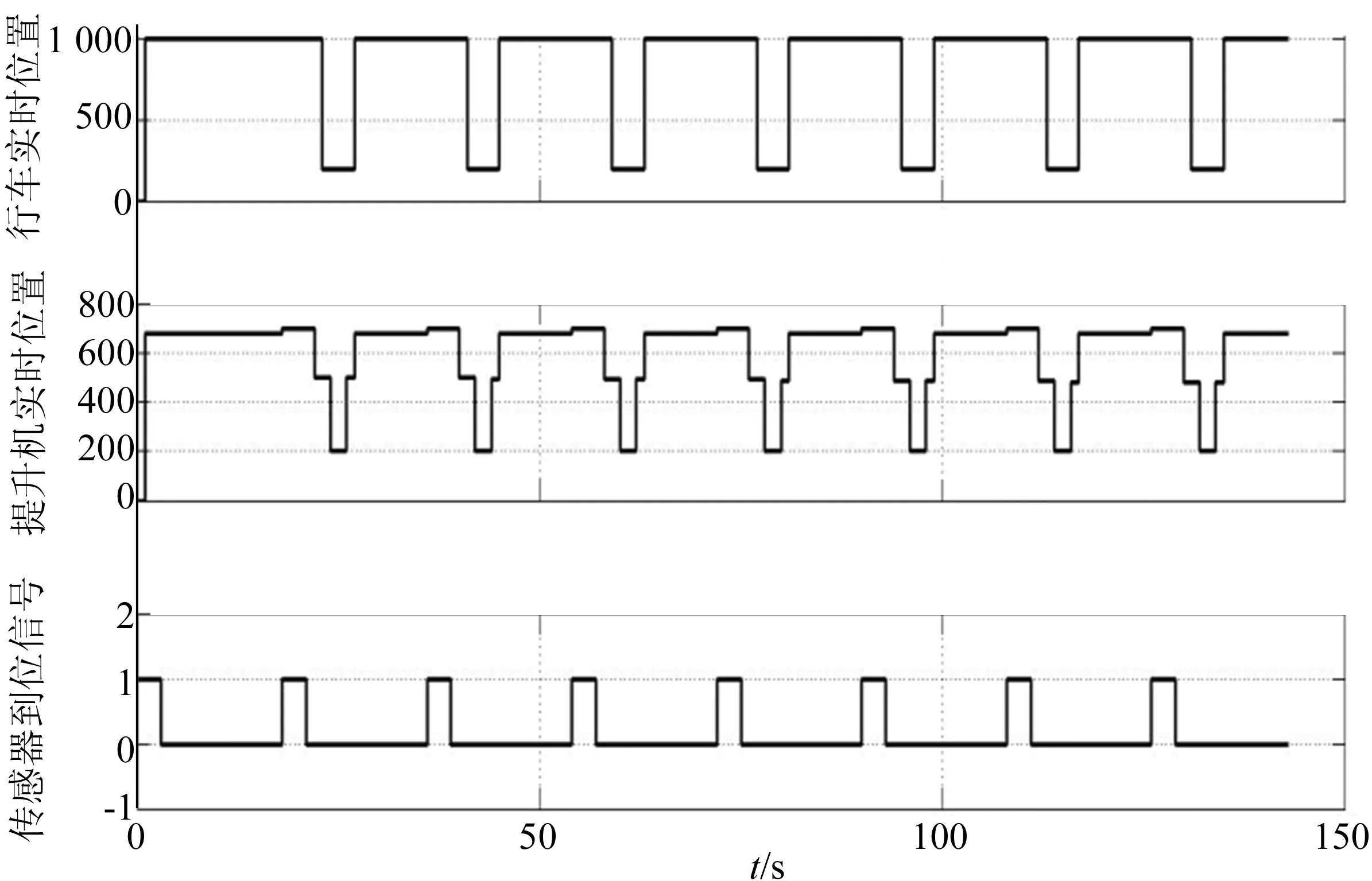
图9 玻璃生产节拍为15 s/片时运行状态
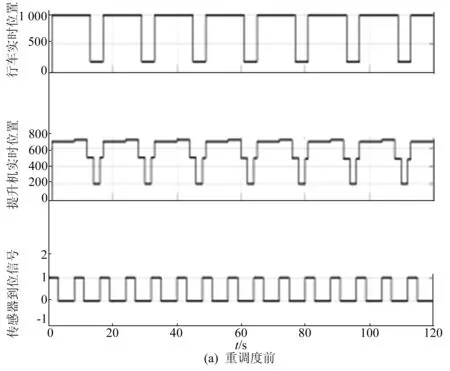
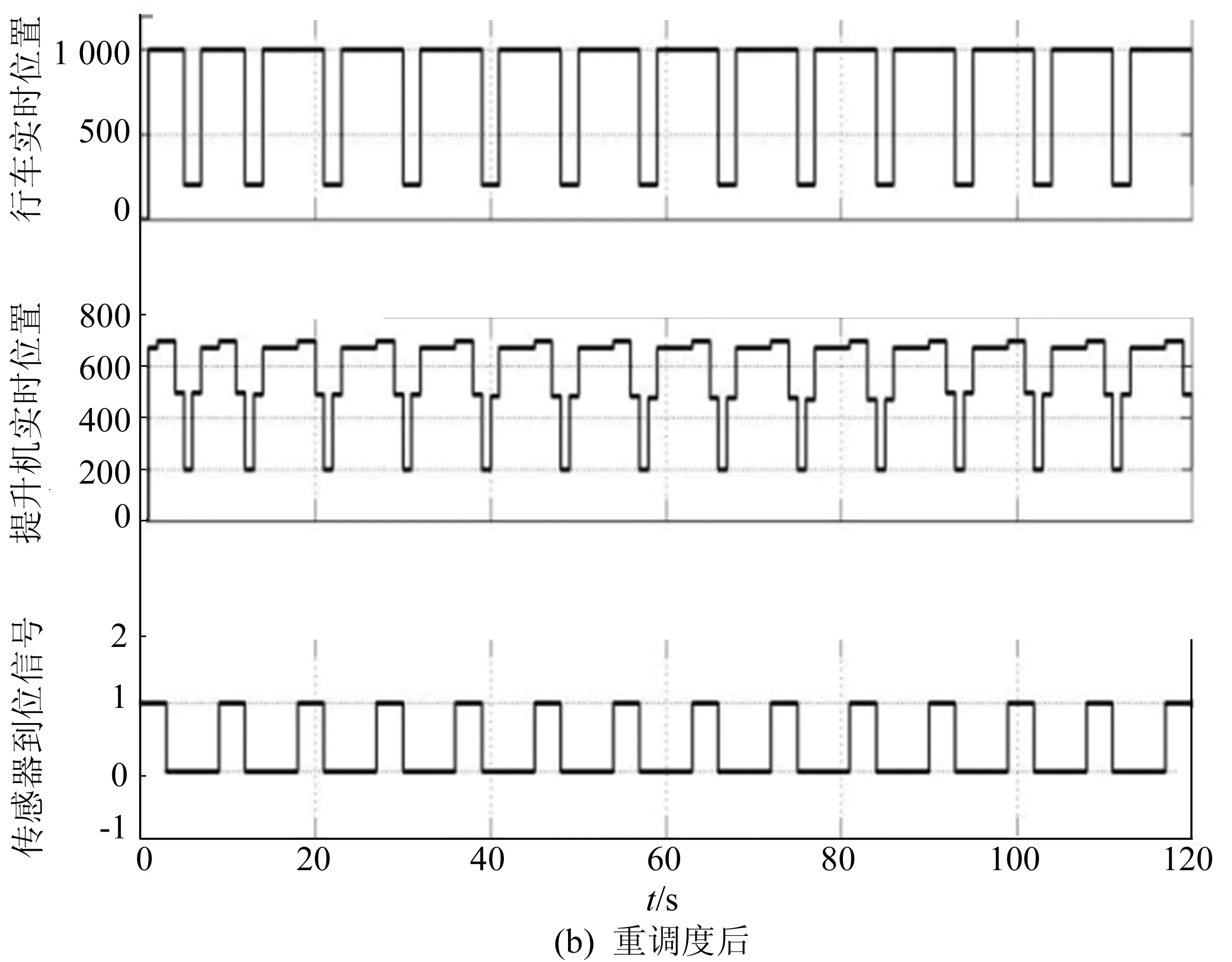
图10 玻璃生产节拍6 s/片时重调度前、后运行状态
从实验结果可以看出,基于多Agent的玻璃自动堆垛控制系统能够很好地满足生产控制的动态性、实时性,基于有限状态机的堆垛单元Agent模型能够对触发事件做出相应的处理而且能够实现状态的转换,证明了本文采用有限状态机对多Agent的建模方法是正确可行的。当事件发生时,状态的跳转既迅速又精准,参数和生产节拍可以根据使用者需求随意设定,大大增强了系统的自动控制能力和通用性。
4 结 论
现代制造系统呈现出数字化、网络化、智能化、集成化和柔性化等特征,是Agent技术的最佳应用对象。基于Agent技术的现代制造系统,利用Agent具有的自处理、自适应和自学习能力,通过多个Agent的共同协商和通信,解决生产过程的协作策略与冲突消解等问题。最后通过Simulink/Stateflow模块构建了一个基于FSM的堆垛单元Agent模型,系统模型的仿真得以实现,仿真结果看出基于多Agent的自动堆垛控制系统具有很好的适应性。模型复杂度适中,通过修改系统模型的参数值,可以让使用者进行虚拟测试,以便模型适用于特定的系统,大大增强了系统的通用性和稳定性以及自动控制能力。
[1] 乔兵,朱剑英.多Agent智能制造系统研究综述[J].南京航空航天大学学报,2001,33(1):1-7.
[2] 张洁.基于Agent的制造系统调度与控制[M].北京:国防工业出版社,2013.
[3] CARRERA A,IGLESIAS C A.A systematic review of argumentation techniques for multi-agent systems research [J].Aritifical Intelligence Review,2015,44(4):509-535.
[4] BELAQZIZ S,EL FAZZIKI A,EL ADNANI M,et al.An agent-based modeling approach for decision-making in gravity Irrigation systems[J].Internet Technology and Secured Transactions,2011,6(11):673-680.
[5] 陈玮,张小花.动态控制元结构的建模及其在 StateFlow环境下的仿真[J].系统仿真学报,2006,18(9):2577-2581.
[6] 梁彦刚,陈磊,唐国金.有限状态机在导弹防御系统分析中的应用[J].微计算机信息,2007,23(7):244-246.
[7] 俞晓鹏.基于有限状态机的光伏系统中逆变器建模方法[J].电力科学与工程,2015,31(6):18-22.
[8] 赵风清.基于有限状态机的动力型假肢膝关节控制方法研究[D].天津:河北工业大学,2014.
[9] 赵业青.基于多Agent的钢铁生产复杂物流系统建模与仿真研究[D]. 昆明:昆明理工大学,2011.
[10] 范辉,张宇文,李文哲.基于状态流的一类混杂动态系统仿真方法[J].系统仿真学报,2009,21(22):7014-7018.
Modelingandsimulationofglassstackingcontrolsystembasedonmulti-Agent
CHEN Wei, JIN Jing, LI Xin
(School of Electric Engineering and Automation, Hefei University of Technology, Hefei 230009, China)
In view of the complexity and dynamic of the production control process of the modern manufacturing system, the distributed structure of multi-Agent system is presented as the production organization and operation mode. Based on the theory of multi-Agent, the model of the automatic control system of photovoltaic glass stacking is established, and the Agent is described by the finite state machine theory. The model is simulated through Simulink/Stateflow and the simulation results show that the photovoltaic glass automatic stacking control system based on multi-Agent can well satisfy the dynamic and real-time demand of the production control, which is valuable for improving the production efficiency of modern manufacturing.
production control; multi-Agent; finite state machine; Stateflow software
2016-04-29
安徽省科技攻关计划资助项目(1501021057)
陈 薇(1981-),女,安徽铜陵人,博士,合肥工业大学副教授,硕士生导师;
金 晶(1991-),女,安徽安庆人,合肥工业大学硕士生,通讯作者,E-mail:13075521289@163.com.
10.3969/j.issn.1003-5060.2017.12.009
TP391
A
1003-5060(2017)12-1624-06
(责任编辑张 镅)
