一种粗-精结合的航天侦察航迹关联算法
2018-01-09尉强,刘忠
尉 强,刘 忠
(1.海军工程大学电子工程学院,湖北武汉430033;2.空军预警学院,湖北武汉430019)
一种粗-精结合的航天侦察航迹关联算法
尉 强1,2,刘 忠1
(1.海军工程大学电子工程学院,湖北武汉430033;2.空军预警学院,湖北武汉430019)
航天侦察中光学成像侦察能够获得精确的目标方位信息,而电子侦察能够获得准确的目标属性特征,为综合利用二者的特性来对航迹进行关联,提出一种基于粗-精结合的航迹关联算法。该算法通过方位信息对目标航迹进行粗关联,通过多维属性信息对目标进行精关联,最终得到航迹关联结果。分析了航天侦察传感器的时空对准方法,给出了多因素模糊综合决策航迹关联的具体步骤,并通过仿真实验对算法性能进行了验证。结果表明,提出的算法能够较好地解决航天侦察手段的航迹关联问题,与JPDA方法相比,该方法具有较高的关联正确率。
航天侦察;航迹关联;模糊综合决策;粗关联;精关联
0 引言
航天侦察是当今最先进、最有效的信息获取手段,可对全球实施侦察监视,具有不受国界限制、周期性区域覆盖、侦察领域广阔等其他侦察手段无法比拟的巨大优势[1]。其中,星载光学成像侦察和电子侦察是应用比较广泛的两种侦察手段。但这两种侦察手段的监视范围、定位方式及定位精度存在很大的差异。光学成像侦察的目标定位精度一般在百米至公里量级,电子侦察获取的目标定位精度一般在公里至几十公里级,瞬时监视范围一般在数百至数千平方公里。因此将它们的数据关联融合后可以显著提高定位精度。此外,电子侦察刻画的是目标配属的辐射源特征,侦察数据经过处理,获得辐射源参数后,在有关情报的支持下,可以较为准确地判定辐射源类型及型号;而成像侦察的目标识别能力直接与分辨率有关,在较低图像分辨率情况下,只能判定目标粗的类别归属[2]。这两种侦察手段能从不同角度在不同层次获取目标信息,可相互进行引导,将两者结合,可以显著提高目标情报质量。
要将两种传感器获取的目标信息有机结合起来,首先要解决的问题是目标航迹的关联。由于成像侦察和电子侦察卫星使用的传感器类型不同,在系统误差、定位精度上存在较大的差异,这给它们的航迹关联带来了困难。传统的航迹关联算法,一般都是基于它们共同子空间方位角的,但是由于方位角测量精度不同,有时会存在较大偏差,仅仅利用一维方位信息很难达到较高的关联正确率[1-4]。成像侦察和电子侦察卫星还能获得目标的属性信息,但由于获取情报的局限性,一般不易完全掌握目标的电磁特征,这使得在目标判定上存在一定的模糊性,本文充分利用此特点,研究了粗精结合的多因素模糊综合决策的航迹相关模型,该模型综合考虑了两类传感器的方位信息和多维属性信息,实验证明,该方法能达到较高的关联正确率。
1 传感器航迹的时空对准
由于成像侦察卫星和电子侦察卫星的探测周期不同、目标与不同传感器相对位置不同等,使得星载传感器的目标探测数据不是在同一时刻得到的,即存在着探测数据的时间差异,不同的传感器工作在各自的平台上,采用不同的坐标系。因此,对星载传感器进行航迹相关判定前,需要进行时间对准和空间对准,将各传感器不同步不同坐标系下的方位信息同步到同一基准时标和相同的参考坐标系下[5]。
1.1 时间对准
在进行时间对准时,将传感器数据统一到探测周期较长的传感器的航迹数据时标上,在实际的海战场多传感器数据融合工程实践中,通常电子侦察卫星传感器的数据采集率高于成像侦察卫星,且具有较高的对目标方位信息的探测精度,因此按成像侦察卫星传感器航迹的时间进行对准[3]。常用的时间对准的方法有外推或内插,通过外推、内插方法解决成像侦察卫星传感器探测到的量测值较少的问题。
常用的纯方位插值算法有匀角速度算法、匀角加速度算法、恒定角速变化率算法、三次样条插值算法、拉格朗日插值算法、最小二乘算法等[6]。综合考虑算法性能和计算复杂度,本文采用三次样条差值进行时间配准。
设θ(t1),θ(t2),…,θ(t n-1),θ(t n)为传感器在时刻(t1,t2,…,t n-1,t n)测得的目标方位,令

且θ(t)是[t i-1,t i]上的三次多项式,那么θ(t)的二阶导数θ″(t)可表示为

式中,h i=t i-t i-1。
由条件θ(t i-1)=y i-1,θ(t i)=y i,即可得积分常数为

其中,M i由以下矩阵确定:
1.2 空间对准
在星载传感器融合系统中,由于星载传感器都是纯方位传感器的航迹,因此,在进行空间对准时,将它们统一转换到统一平台的坐标系即可。
为了实现空间对准,将多传感器获得的目标量测数据发送到融合中心,通过融合中心处理后转换成统一坐标系数据,再进行跟踪滤波,航迹关联。星载传感器目标航迹关联与仿真分析中常用的几种坐标系为地心直角坐标系(ECF)、地心惯性坐标系(ECI)[7]。
1)地心直角坐标系O-X EY EZ E
地心直角坐标系(ECF)是随地球自转而变化的坐标系,如图1所示,O为地心,X EOY E为赤道面,Z E轴垂直于X E OY E,X E轴为地球的自转轴,Z E指向北极,Y E在赤道面内,与X E轴、Z E轴构成右手直角坐标系。

图1 ECF坐标系
2)地心惯性坐标系O-X IY IZ I
地心惯性坐标系(ECI)与惯性空间固连。如图1所示,O为地心,平面X IOY I以及Z I轴与ECF坐标系重合,X I轴指向春分点的方向,Y I轴与X I,Z I轴构成右手直角坐标系。
3)地心惯性坐标系与地心直角坐标系之间的转换
设目标在t时刻的位置量测信息在ECF坐标系、ECI坐标系中分别为


2 航天侦察航迹关联算法
2.1 基于方位角的粗关联
设海面舰船目标的动态模型[8]为

式中,X(k)为状态向量,Φ为状态转移矩阵,G(k)为过程噪声分布矩阵,V(k)为过程噪声。假定V(k)是零均值的高斯白噪声。
传感器s的测量模型为

式中,W s(k)为零均值的协方差矩阵R s(k)高斯白噪声,即测量噪声。
令s=1时为成像侦察卫星传感器,s=2时为电子侦察卫星传感器。成像侦察卫星传感器的量测值为目标的方位角和距离,即Z1(k)=[θ(k),r(k)],电子侦察卫星的输出为目标的方位角和俯仰角,即Z2(k)=[θ(k),Φ(k)],它们共同的子空间为角度,其中方位角的量测模型为

式中,θs(k)为目标方位角的量测值,为目标方位角的估计值,nθs(k)为均值为零、方差为的高斯白噪声。
由于本文主要讨论的是星载传感器的航迹关联算法,因此假定在航迹关联前,传感器已经完成了跟踪、时空配准,且来自同一传感器的不同目标的信息互不相关。设

由于卫星的位置量测信息只有角度信息,所以使用角度信息粗关联。为了简单起见,只使用方位角信息,即采用方位角差值的绝对值,共采样T个时刻,并进行平均:
满足角度测量平均差值小于2个观测值偏差之和的航迹对是可能关联的,即满足

2.2 基于多因素模糊综合决策的精关联
1)建立模糊因素集
模糊因素集的一般形式:U={u1,u2,…,u n},n为模糊因素个数。在两种传感器特性的基础上,由于从成像侦察和电子侦察中只能得到角度信息,除此之外,由于两种传感器都具有一定的识别功能,则可获得相同的属性信息,即目标身份信息[8-17]。所以可使用目标位置信息和属性信息定义模糊因素集。设模糊因素集为U={u1=目标角度相似度的模糊因子,u2=目标身份可信度的模糊因子},则k时刻模糊因素的具体形式[8-11]如下:
① 目标角度相似度的模糊因子。设T1=(1,2,…,n1),T2=(1,2,…,n2)为电子侦察和成像侦察这两个传感器粗关联后产生的所有航迹的集合,i,j为航迹编号且i∈T1,j∈T2。θi(k),θj(k)分别是k时刻第i,j条航迹中目标的方位角量测值,φi(k),φj(k)分别是k时刻第i,j条航迹中目标的俯仰角量测值。一般的方法是采用角度差值绝对值的方法作为模糊因子的计算方式,本文同时考虑到方位角和俯仰角,根据标准差计算的思想,定义模糊因子如下:

②属性信息的模糊因子。依据D-S证据理论实现属性信息的模糊化,m kØi与m kØj是k时刻第i,j条航迹的目标身份基本概率赋值,则得组合后模糊因子:

2)建立模糊评判集
模糊评判集的一般形式为V={v1,v2,…,v m},m表示模糊评判的级别[11]。航迹关联问题的模糊评判集,是V的一个子集。根据航迹关联的实际问题,可将模糊评判集分为3个级别,即为关联、不关联或者不确定,具体形式为V={v1=关联,v2=不关联,v3=不确定}。
在直积集U×V上定义的从U到V的单因素模糊评判矩阵为

式中,r kl表示考虑第k个因素时两条航迹关联得到的第l种结果的可能度,记为

在位置因素中,由于传感器具有系统误差和量测误差,观测结果与目标真实位置之间通常存在一定的偏差,假设这个偏差小于分辨率δ。则目标位置间的角度差小于δ时,可以认为两条航迹源于同一个目标,如果距离达到3δ时,两个观测为同一目标的可能性下降为10%,大于3δ之后,随着欧氏距离增大,是同一个目标的可能性就变得很小。则可设置如下的隶属度函数:

在属性因素中,u2(k)描述了k时刻成像侦察卫星对第i个目标与电子侦察卫星传感器对第j个目标关于属性测量(即目标身份)的不一致测度。因此,可定义属性因素的隶属函数为

已定义的评价级别m=3,所以单因素模糊评判矩阵为

实际的航迹关联问题,由于异类传感器的测量精度不同,加之环境复杂,杂波数量较多,需要综合考虑多个因素,要根据实际情况为各因素分配权重。所以航迹关联的判决结果就是由因素权重模糊集A和评判矩阵R的复合作用,即由它们合成得到V上的关于两航迹关联程度的模糊集B为

式中,b l表示两条航迹关联对于第l个评价级别v l的隶属度。
因素权重模糊集的一般选择a1≥a2≥…≥a n,并且最后几个因素的权重均较小。针对实际传感器的航迹关联的特点,应依据模糊因素子集中各个相关因素对判决的重要程度对模糊因素子集U进行权值分配。目标的角度数据由于是两类传感器唯一的位置公共测量信息,所以是关联中最重要的因素,其次是目标身份的相似度,则可取α1=0.75,α2=0.25。
对于模糊集的合成运算来说,在计算b l时有多种模型,其中典型的有“主因素决定型”、“加权平均型”和“混合型”三种算法。混合型算法综合了主因素决定型和加权平均型的优缺点,并通过混合稀疏α调整[11]。具体形式为

即在混合型算法中,主因素决定型的结果用α加权;同时采用普通矩阵乘法形式,但相乘时用析取,相加时用合取,用1-α加权[9]。
计算出多因素综合相似度的模糊关联矩阵后,讨论模糊判决规则的选定。最常用的判决规则是最大隶属度原则,即b l=max(b1,b2,b3),但实际应用中,由于应用环境的不同,使用最大隶属度原则判决航迹相关可能达不到理想效果,可根据不同应用环境选用不同的判决规则。本文选择以下方式进行判决:①若b1-b2>ε,且b1>b3,则判断为航迹关联;②若b2-b1>ε,且b2>b3,则判断为航迹不相关;③其余情况则判断航迹关系不确定。其中,ε为预设门限,通过经验值来确定。对于未关联的航迹,继续参与下一次关联,若连续三次关联不上,则认定进行未关联航迹处理。以航迹是否真实存在为判断目的,使用意见一致性理论进行处理。
相关门限的确定,需要做大量的模拟实验。若门限设置偏高,则目标航迹难以关联且漏关联概率增大;反之,若门限偏低,则错关联概率可能增大。由于目标出现机动,各传感器对机动的反应时间不同,需要适当地调整门限,以免出现较多的错误关联,因而,门限需要具有自适应的优化能力。
3 仿真实验
以成像侦察卫星和电子侦察卫星跟踪1艘大型舰船为例进行航迹相关判定的仿真实验,这里仅考虑航迹相关问题,而略去对目标的跟踪过程。仿真实验中,用运动模型仿真了舰船的轨迹,用量测模型生成相应的成像侦察卫星和电子侦察卫星的量测数据,并用Kalman滤波对其进行跟踪。假设目标初始位置已知,作匀速运动。
本文主要研究的航迹关联问题,仿真过程中假设已经完成目标跟踪,并且已进行过时空对准。假设侦察卫星方位角、俯仰角的测量误差标准差分别为成像侦察卫星σϕ=σε=20μrad,电子侦察卫星σϕ=σε=15μrad。模糊因素集选为U,与之对应的权值为A={a1=0.75,a2=0.25},合成运算模型选用混合型模型,由式(20)、(23)确定基于2个因素判决两航迹相似的隶属度。用蒙特卡罗方法进行了100次仿真。仿真结果如图2~6所示。

图2 舰船目标的轨迹图

图3 目标的经纬度均方根误差

图4 目标方位角变化曲线

图5 目标航迹的模糊度
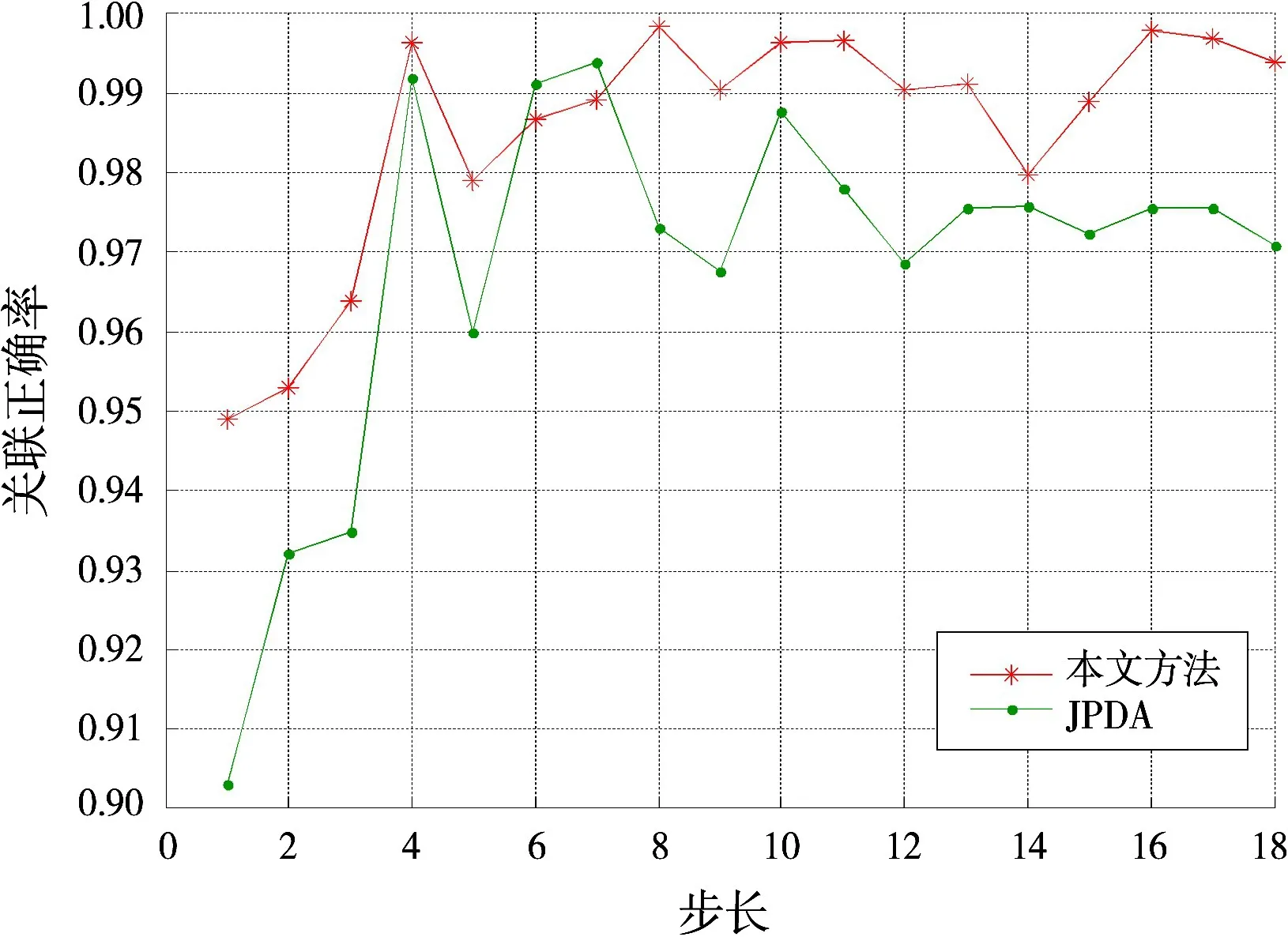
图6 关联正确率曲线
其中,图2为舰船目标的一段真实轨迹,图3为目标的经纬度均方根误差,图4为目标某时间段的方位角变化曲线,图5为目标航迹的模糊度,图6为采用多因素模糊综合决策精关联后的关联正确率曲线,并在相同的条件下与传统的统计方法(JPDA方法)进行了比较。实验证明:本文算法计算速度较高,且关联正确率可以达到98%,明显高于JPDA的84%。
4 结束语
航天侦察在目标监视方面具有巨大的优势,如何利用多种航天侦察手段实现目标航迹关联是急需解决的问题。本文立足航天侦察传感器的探测特点,从方位角和属性信息的角度出发,提出一种基于多因素模糊综合决策的航天侦察航迹关联算法。并通过实验对算法进行了验证,结果表明:提出的算法具有较高的航迹关联正确率。
本文对不同手段的航天侦察航迹关联问题进行了研究,在一定程度上解决了单一航天侦察条件下的航迹关联问题。然而,如何将航天侦察情报与其他情报信息(如天波超视距雷达情报、大型相控阵雷达情报)进行融合实现目标综合航迹关联,将是未来进一步需要解决的难题。
[1]李丹,于小红.多传感器信息融合在航天侦察中的应用[J].兵工自动化,2012,31(3):86-88.
[2]曾昊.基于星载异类传感器的舰船编队目标数据关联方法研究[D].长沙:国防科技大学,2008.
[3]HE You,LU Dajin,PENG Yingning.Review of Track Correlation Algorithms in Distributed Multisensor Systems[J].Systems Engineering and Electronics,1999,21(10):15-18.
[4]王壮,樊昀,王成,等.基于星载电子侦察与成像侦察的数据融合技术[J].电子学报,2003,31(12A):2127-2130.
[5]井沛良,刘方.一种使用修正模糊隶属度的航迹关联方法[J].应用科学学报,2012,30(2):181-186.
[6]周永丰,张圣华.纯方位线性插值问题研究[J].舰船电子工程,2003,23(6):37-42.
[7]张中科,方青,田明辉.基于纯方位信息的多传感器航迹融合仿真分析[J].舰船电子对抗,2014,37(3):1-6.
[8]范恩,谢维信,刘宗香.异类传感器合成量测的模糊航迹起始方法[J].信号处理,2013,29(11):1439-1445.
[9]郭徽东,章新华.基于模糊综合函数的航迹关联算法及其应用[J].系统工程与电子技术,2003,25(11):1401-1403.
[10]井沛良.多传感器数据关联中的关键技术研究[D].长沙:国防科技大学,2011.
[11]柳超,关键,黄勇,等.基于PHD的多目标检测前跟踪改进方法[J].雷达科学与技术,2016,14(1):1-6.LIU Chao,GUAN Jian,HUANG Yong,et al.An Improved Multitarget Track-Before-Detect Algorithm Based on Probability Hypothesis Density Filter[J].Radar Science and Technology,2016,14(1):1-6.(in Chinese)
[12]宋新景.基于极化特征的雷达目标识别技术[J].雷达科学与技术,2016,14(1):39-44.
[13]李志汇,刘昌云,倪鹏,等.反导多传感器协同任务规划综述[J].宇航学报,2016,37(1):29-38.
[14]董凯,刘瑜,王海鹏.空间邻近目标跟踪与航迹关联的联合优化算法[J].宇航学报,2014,35(10):1211-1217.
[15]陈辉,韩崇昭.机动多目标跟踪中的传感器控制策略的研究[J].自动化学报,2016,42(4):512-523.
[16]范恩.基于模糊信息处理的传感网系统中多目标跟踪方法[D].西安:西安电子科技大学,2015.
A Track Correlation Algorithm of Space-Based Reconnaissance Based on Rough and Precise Correlations
WEI Qiang1,2,LIU Zhong1
(1.Electronics Engineering College,Naval University of Engineering,Wuhan430033,China;2.Air Force Early Warning Academy,Wuhan430019,China)
As for the space-based reconnaissance,the optical reconnaissance can achieve the precise target azimuth information,and the electronic reconnaissance can achieve the precise target attributes.To make a track correlation by use of these characteristics,this paper proposes a track correlation algorithm based on the rough and precise correlations.The rough correlation is firstly conducted via the azimuth information,then the precise correlation model is conducted via the multi-dimensional attributes,and finally the results are achieved.The temporal and space alignment method of space-based reconnaissance sensors is given,and the track correlation algorithm based on multi-factor fuzzy comprehensive decision is presented in detail.Simulations are made to verify the performance of the proposed algorithm.Results show that the proposed method can solve the problem of track correlation of space-base reconnaissance equipments well,and it has a higher correlation accuracy compared to the traditional JPDA algorithm.
space-based surveillance;track correlation;fuzzy comprehensive decision;rough correlation;precise correlation
TN957
A
1672-2337(2017)01-0029-06
10.3969/j.issn.1672-2337.2017.01.005
2016-07-22;
2016-09-09
国家自然科学基金(No.61102168)

尉强男,1982年出生,山西临汾人,博士研究生,主要研究方向为指挥自动化。E-mail:yangqihong0354@163.com
