BDS静态精密单点定位算法分析
2018-01-08王趁香葛茂荣祝会忠马天明
王趁香,葛茂荣,祝会忠,马天明,高 猛
(1.辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000;2.德国GFZ地学研究中心,德国Potsdam A1714473)
BDS静态精密单点定位算法分析
王趁香1,葛茂荣2,祝会忠1,马天明1,高 猛1
(1.辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000;2.德国GFZ地学研究中心,德国Potsdam A1714473)
为了提高BDS静态精密单点定位算法的精度,提出与BDS静态精密单点定位相关的数学模型、误差处理方法以及对应的参数估计策略:通过双频无电离层组合模型消除电离层延迟误差一阶项;同时采用误差改正模型对以对流层延迟为主的中性大气延迟误差、系统偏差和天线相位偏差等误差进行改正。实验结果表明:可见卫星数和PDOP值对BDS静态精密单点定位可产生一定的误差影响,东(E)方向和北(N)方向误差较天(U)方向小;虽然目前BDS跟踪站数量有限以及BDS精密轨道和钟差精度较GPS差,但是BDS静态精密单点定位精度仍然能够实现dm至cm级定位。
BDS精密单点定位;数学模型;参数估计策略;双频无电离层组合模型;精度分析
0 引言
精密单点定位技术(precise point positioning,PPP)采用单台全球卫星导航系统(global navigation satellite system,GNSS)接收机、国际GNSS服务组织(International GNSS Service,IGS)给出的30 s精密星历、30 s的精密钟差产品以及载波相位观测值来进行高精度定位。文献[1-8]研究了非差精密单点定位方法,处理长时间静态观测数据的结果精度达到cm级。文献[9-12]使用在测码伪距与测码伪距观测值间、载波相位与载波相位观测值间分别形成双频消电离层组合的精密单点定位模型,获得了cm级的定位精度。文献[13]中提到经过十多年的快速发展,精密单点定位技术已在高精度测量、低轨卫星定轨、航空测量、地表变形监测等领域取得了广泛的应用。文献[14]介绍北斗卫星导航系统(BeiDou navigation satellite system,BDS)是中国开发的全球卫星导航系统,包含6颗地球静止轨道(geostationary Earth orbit,GEO)卫星、5颗倾斜地球同步轨道(inclined Earth synchronous orbit,IGSO)卫星和5颗中高度地球轨道(medium altitude Earth orbit,MEO)卫星。目前BDS完全具备了区域导航定位能力,正逐步向GNSS推进。BDS空间系统采用2000国家大地坐标系(China geodetic coordinate system 2000,CGCS2000),BDS时(BDS time,BDT)采用的秒长为原子时秒长。目前,BDS基本情况如表1所示。开展BDS PPP研究,缩短精密单点定位初始化时间将会进一步完善GNSS PPP模型与算法;BDS高精度导航定位的发展与应用为多卫星导航系统组合定位解算奠定基础,具有重要的理论意义与实用价值。
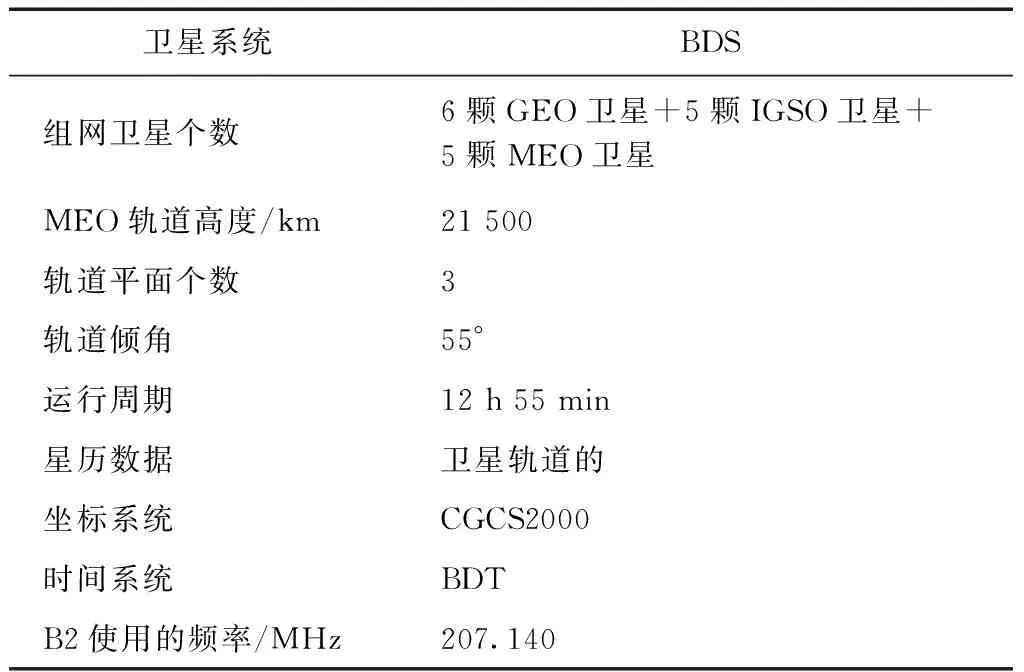
表1 BDS基本情况
1 BDS PPP的数学模型和参数估计策略
1.1 数学模型
BDS静态精密单点定位的基本观测方程采用双频无电离层组合以消除电离层一阶项误差的影响。BDS具有B1、B2、B3共3个信号频率,本文采用B1、B2频率上的相位和伪距观测值进行无电离层组合,其具体观测方程为
(1)

1.2 参数估计及数据处理策略
BDS静态精密单点定位需要计算的参数包括各个观测站的坐标、所有接收机的钟差、系统的偏差和天顶对流层的延迟以及各个卫星不间断观测时间段内的模糊度等。实验采用的误差处理方法会有与接收机有关的接收机钟差,处理方法一般将接收机钟差当作一个未知参数,且假设各历元之间的接收机钟差互相独立,当做是一种白噪声并与测站位置、天顶对流层延迟等参数一起解算。与卫星有关的卫星钟差则采用多项式内插方法来获得每历元所对应的卫星钟差。对于多路径效应,用半参数法估计多路径误差以削弱其影响。文献[15-16]中有关对流层延迟计算的干分量采用Saatamoinen模型,对流层延迟残余采用随机游走进行模拟,天顶对流层延迟利用图形建模框(graphical modeling framework,GMF)映射到传播路径上,其他一些误差模型的时延问题同样可以利用GMF克服。实验采用北斗卫星观测实验网(BeiDou experimental tracking stations,BETS)提供的采样间隔为30 s的精密钟差和轨道并用其来固定卫星的轨道和钟差,对于那些产生cm级以上的系统偏差,如相对论效应、固体潮汐以及相位缠绕产生的误差则可以利用模型来改进。当今还没有机构能够给出关于BDS卫星端和接收机端的精确天线相位中心偏移,同时其天线相位中心变化信息当前也无法得到;但并不影响BDS区域导航定位服务的能力。BDS精密单点定位数据处理的方法如表2所示。

表2 BDS PPP数据处理方法
2 实验与结果分析
实验采用CUT0、MAL2、GMSD观测站2016-05-20—2016-05-22 的BDS观测数据并采用不同的计算时长对观测站数据进行实验并分析,CUT0、MAL2、GMSD各观测站经度、纬度以及天线类型如表3所示。为了分析定位精度,以IGS中心发布的第1 897个星期的测站坐标解作为参考值,实验使用的采样间隔为30 s的精密钟差和轨道为BETS提供。实验观测8 640个历元,卫星截止高度角为7°,观测时间为3 d。可见卫星数如图1所示,位置精度衰减因子(position dilution of precision,PDOP)的变化如图2所示。

表3 测站相关信息

图1 可见卫星数

图2 PDOP值
计算分析时,首先将观测站CUT0、MAL2、GMSD 24 h的观测数据分为36个观测时段,对这3个观测站3 d的数据进行实验,即每个子时段2 h,3 d一共36个子时段,以IGS第1 897个星期的坐标作为参考值,分别计算出每个时段所获得的测站坐标在E、N和U方向的定位误差,其结果如图3所示。
然后,将观测站CUT0、MAL2、GMSD 24 h的观测数据分为4个观测时段,对这3个观测站3 d的数据进行实验,即每个子时段6 h,3 d一共12个子时段,以IGS第1 897个星期的坐标解作为参考值,分别计算出每个时段所获得的测站坐标在E、N和U方向的定位误差,实验结果如图4所示。

图3 BDS 2 h静态精密单点定位误差
第三,将观测站CUT0、MAL2、GMSD 24 h的观测数据分为2个观测时段,对这3个观测站3 d的数据进行实验,即每个子时段12 h,3 d一共6个子时段,以IGS第1 897个星期的坐标解作为参考值,分别计算出每个时段所获得的测站坐标在E、N和U方向的定位误差,实验结果如图5所示。
最后,将观测站CUT0、MAL2、GMSD 24 h的观测数据归为1个观测时段,对这3个观测站3 d的数据进行实验,即每个子时段24 h,3 d一共3个子时段,以IGS第1 897个星期的坐标解作为参考值,分别计算出每个时段所获得的测站坐标在E、N和U方向的定位误差,实验结果如图6所示。

图4 BDS 6 h静态精密单点定位误差
由图1~图6可知,可见卫星数量和PDOP值对BDS静态精密单点定位精度产生一定的影响。本实验采用的卫星截止高度角为7°,可见卫星数如图1所示,一般在6颗左右,满足定位要求;PDOD值的变化如2图所示,可知卫星结构比较理想,满足实验要求。从图3中可以看出,2 h的定位误差一般在5 cm左右,一小部分误差超过了5 cm,个别误差为6 cm左右,总体来看,E方向与N方向的误差大小相当,U方向的误差较E方向与N方向大,可达到6 cm。从图4中可以看出,6 h的定位误差一般在4 cm以内,一小部分误差在4 cm左右,E方向与N方向的误差大小相当,U方向的误差可达到4.5 cm,总体来看,E方向与N方向的误差较小,U方向的误差较大。从图5可以看出,12 h的定位误差一般在3 cm左右,一小部分误差超过了3 cm,个别误差为4 cm左右。总体来看,E方向和N方向的误差较小,U方向的误差较大,可达到4.5 cm。从图6中可以看出,24 h的定位误差一般在2 cm以内,一小部分误差在3 cm左右,有个别U方向的误差超过了3 cm,总体来看,E方向和N方向的误差较U方向的误差小。同时从实验结果中可以看出,随着计算时长的增加,E、N、U方向误差逐渐减小。
对图3至图6的定位结果的均方根(root mean square,RMS)值、标准差(standard deviation,STD)值进行统计,CUTO、MAL2、GMSD 3个不同观测站的RMS值随着观测时间增加的情况如图7所示,可以看出U方向RMS值较E、N方向大,随着观测时间的增加E、N、U方向RMS值有所减小。图8为CUTO、MAL2、 GMSD 3个不同观测站STD值的变化,从图8中可以看出U方向STD值较E、N方向大,随着观测时间的增加,E、N、U方向STD值有所减小。

图5 BDS 12 h静态精密单点定位误差

图6 BDS 24 h静态精密单点定位误差
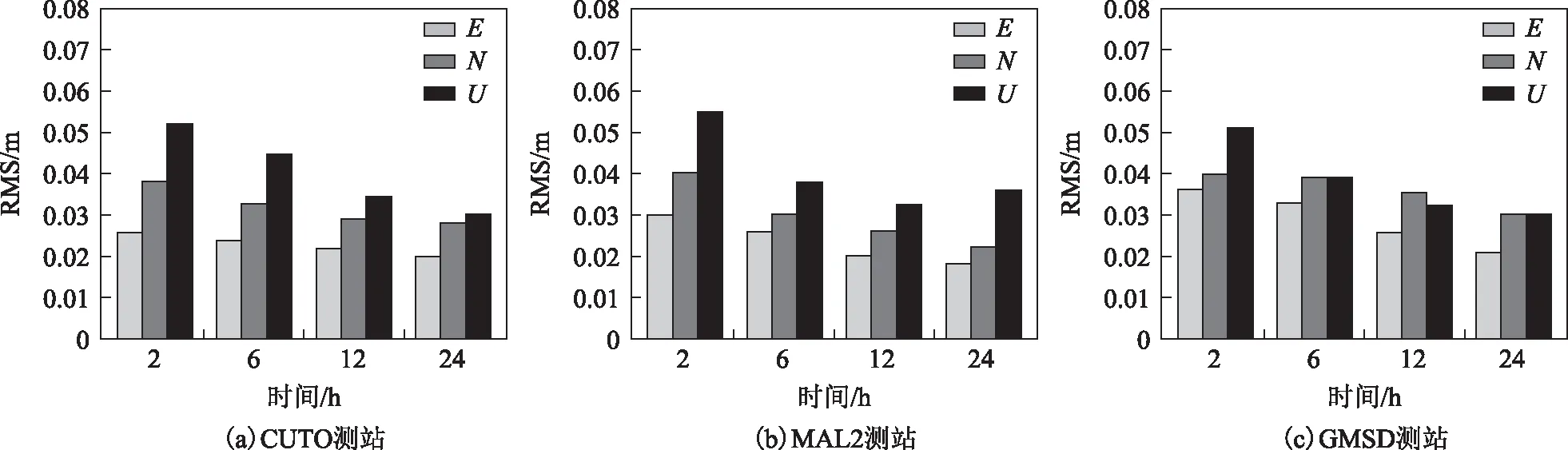
图7 不同观测站RMS值

图8 不同观测站STD值
3 结束语
通过实测数据对CUT0、MAL2、GMSD 3个测站不同时段(2 h、6 h、12 h、24 h)进行BDS静态精密单点定位实验研究,结果表明:BDS静态精密单点定位误差在E、N和U方向随着观测时间的增长误差逐渐减小,E、N方向误差降低速度小于U方向误差降低速度,此外,从实验中可知BDS静态精密单点定位精度可达到dm至cm级,可见卫星数的增加或减少对BDS静态精密单点定位精度会产生轻微影响,一些情况下可见卫星数增多时定位精度提高。本文同时对CUT0、MAL2、GMSD测站进行了RMS值和STD值统计,结果表明,U方向高于E和N方向。随着观测时间的增加,E、N和U方向均有所减小,但不是特别明显,说明BDS静态精密单点定位较稳定。
[1] 徐爱功,韩晓东,崔希民,等.全球卫星导航定位系统原理与应用[M].徐州:中国矿业大学出版社,2009:16-20.
[2] 杨元喜.北斗卫星导航系统的进展、贡献与挑战[J].测绘学报,2010,39(1):1-6.
[3] 黄令勇,吕志平,刘毅锟,等.三频BDS电离层延迟改正分析[J].测绘科学,2015,40(3):12-15.
[4] 李征航,张小红.卫星导航定位新技术及高精度数据处理方法[M].武汉:武汉大学出版社,2009:23-24.
[5] 李星星,张小红,李盼.固定非差整数模糊度PPP快速精密定位定轨[J].地球物理学报,2012,55(3):833-840.
[6] 杨元喜,李金龙,徐君毅,等.中国北斗卫星导航系统对全球PNT用户的贡献[J].科学通报,2011,56(21):1734-1740.
[7] SHI C,ZHAO Q L,LI M,et al.Precise orbit determination of BeiDou satellites with precise positioning[J].Science China Earth Sciences,2012,55(7):1079-1086.
[8] STEIGENBERGER P,BOEHM J,TESMER V.Comparison of GMF/GPT with VMF1/ECMWF and implications for atmospheric loading[J].Journal of Geodesy,2009,83(10):943-951.
[9] BOEHM J,NIELL A,TREGONING P,et al.Global mapping function(GMF):a new empirical mapping function based on numerical weather model data[J].Geophysical Research Letters,2006,33(12):1-4.
[10] 刘朝英,陈国,赵齐乐,等.BDS单点测速原理及精度分析[J].大地测量与地球动力学,2014,34(6):114-118.
[11] 徐宗秋,徐爱功,高扬,等.对流层延迟参数与坐标参数的相关性研究[J].测绘通报,2013(1):25-28.
[12] 姜卫平,李昭,邱蕾.一种最新的经验投影函数GMF分析[J].大地测量与地球动力学,2009,29(5):85-89.
[13] 徐杰,孟黎,仁超,等.对流层延迟改正中投影函数的研究[J].大地测量与地球动力学,2008,28(5):120-124.
[14] GRIFFITHS J,RAY J R.On the precision and accuracy of IGS or-bits[J].Journal of Geodesy,2009,83(4):277-287.
[15] ZHAO Q.Initial results of precise orbit and clock determination for COMPASS navigation satellite system[J].Journal of Geodesy,2013,20(1):1-12.
[16] 党亚民,王虎,赵文娇,等.融合BDS/GPS/GLONASS 反演全球电离层特性研究[J].大地测量与地球动力学,2015,35(1):87-91.
AnalysisofBDSstaticprecisepointpositioningalgorithm
WANGChenxiang1,GEMaorong2,ZHUHuizhong1,MATianming1,GAOMeng1
(1.School of Geomatics,Liaoning Technical University,Fuxin,Liaoning 123000,China;2.Geo Science Research Center of German GFZ,Potsdam A1714473,Germany)
In order to improve the accuracy of BDS static precise point positioning algorithm,the paper proposed the related mathematical model,error processing method and the corresponding parameter estimation strategy:the first order term of the ionospheric delay error was eliminated by dual frequency ionosphere free combination model,and the neutral atmospheric delay error,system errors and antenna phase deviation,etc.were corrected by error correction model.Experimental result showed that the visible satellite number and PDOP value would produce errors in BDS static precise point positioning,and the errors of east and north directions would be smaller than those of Up direction;although the number of BDS tracking stations was limited,and the accuracy of BDS precise orbits and clock errors was lower than that of GPS,the BDS static precise point positioning could still achieve an accuracy of decimeter to centimeter level.
BDS precise point positioning;mathematical model;parameter estimation strategy;double frequency non-ionospheric combination model;accuracy analysis
2016-10-18
国家自然科学基金资助项目(41504010);辽宁省高校团队创新项目(LT2015013);2014年辽宁省博士启动基金项目(20141141);辽宁省科技厅博士启动基金项目(201501126);辽宁省教育厅科学研究一般项目(L2014139);国家青年基金项目(41504030);国家重点研发计划项目(2016YFC0803102)。
王趁香(1989—),女,河南开封人,硕士研究生,研究方向为卫星导航与定位。
王趁香,葛茂荣,祝会忠,等.BDS静态精密单点定位算法分析[J].导航定位学报,2017,5(4):70-77.(WANG Chenxiang,GE Maorong,ZHU Huizhong,et al.Analysis of BDS static precise point positioning algorithm[J].Journal of Navigation and Positioning,2017,5(4):70-77.)
10.16547/j.cnki.10-1096.20170414.
P228.1
A
2095-4999(2017)04-0070-08
