惯性/地磁组合导航智能分段融合方法
2018-01-08丁柏超
丁柏超,全 伟,杨 旭
(北京航空航天大学 仪器科学与光电工程学院,北京 100191)
惯性/地磁组合导航智能分段融合方法
丁柏超,全 伟,杨 旭
(北京航空航天大学 仪器科学与光电工程学院,北京 100191)
为了减少磁传感器数据异常导致的惯性/地磁组合系统的定位误差,提出基于χ2状态检验法的惯性/地磁组合导航智能分段融合方法:利用χ2状态检验法来检测组合滤波器的状态;通过量测状态和系统估计状态之间的差异来判断磁信号是否异常;根据判断结果对惯性/地磁数据进行分段融合。在数据异常阶段,若磁数据可用则调整组合滤波系数来抑制组合系统误差,若磁数据不可用则直接单独进行惯导解算,从而实现惯性/地磁组合导航智能分段融合。仿真结果表明,所提出的方法能有效抑制磁数据异常引起的定位误差。
组合导航;惯性导航;地磁导航;χ2状态检验;数据融合
0 引言
惯性导航系统是一种具有战略意义的自主导航定位系统,同时也是目前我国远程战略武器中的主要导航手段[1];但惯性导航系统的导航误差随时间不断积累,长时间应用情况下其定位误差很大,不能满足实用情况下对精度的需求。与其他导航定位系统组合进行应用是抑制惯性导航系统误差发散的一种常用有效手段[2-3]。地磁匹配导航也属于自主导航,具有体积小、成本低、隐蔽性强的特点[4-5],尤其在跨海、跨平原、水下等应用环境下是很高效的导航定位方式之一[6-7]。因此,研究高性能、低成本、全天时、全天候的地磁/惯性组合导航对载体自主导航定位具有十分重大的战略意义[8-10]。地磁/惯性组合导航技术已经在美国、瑞典、俄罗斯、法国等国家得到发展与应用。自从美国波音公司将地磁辅助导航系统应用于飞机后,地磁导航技术在航天航空导航领域得到快速发展。其中:英国的西尔索研究所(Silsoe Research Institute)[11]、美国的佛罗里达大西洋大学(Florida Atlantic University)[12]等研究部门开展了惯性导航信息和地磁数据组合技术研究;国内北京航空航天大学、国防科学技术大学、航天三院等单位也开展了惯性/地磁组合导航定位相关技术研究[13-17]。其中北京航空航天大学“十五”期间,在国家“863计划”支持下开展了地磁测量、地磁图建立、地磁图匹配定位和惯性/地磁组合导航等方面的理论研究与相关实验验证工作。目前,进一步深入开展原子磁强计研制工作,且已经取得了一定的进展。下一步拟将原子磁强计应用于惯性/地磁组合导航定位系统中。磁传感器测量信号易受环境干扰导致地磁匹配定位误差增大、影响组合导航系统精度。除了磁传感器方面误差外,运载体本身和周围环境也会产生磁场干扰,影响惯性/地磁组合导航系统性能,并将限制惯性/地磁组合导航系统的广泛应用。这是目前惯性/地磁组合导航系统中需要解决的一个重大问题。
本文针对惯性/地磁组合导航系统特点,分析磁信号误差对组合系统性能的影响,研究基于χ2状态检验法的惯性/地磁组合导航智能分段融合方法。
1 惯性/地磁组合导航
惯性/地磁组合导航是一种全自主的远程、高精度导航方案。此方案中融合了惯性导航系统短时精度高、数据连续平滑和地磁匹配定位系统误差随机波动、但不随时间发散的特点,通过将2个系统输出数据进行融合,实现远程、长时间的高精度、自主导航定位。惯性/地磁组合导航系统以惯性导航系统误差方程为系统模型、以地磁匹配定位结果为外部位置量测,利用卡尔曼滤波进行信息融合,其融合方案如图1所示。
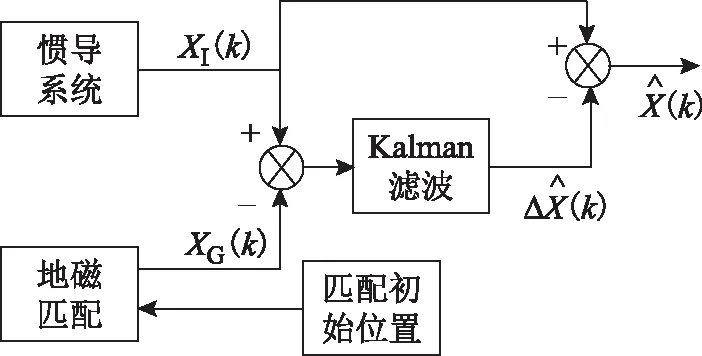
图1 组合方案原理

考虑姿态误差、速度误差、位置误差、陀螺漂移和加速度计偏置,所选的13维状态量为

(1)

离散化的卡尔曼滤波方程为

(2)

传统惯性/地磁组合导航中需要陀螺仪、加速度计和地磁定位的统计误差值,做为Kalman滤波中状态估计与增益系数调整的依据。如果在系统运行过程中陀螺仪、加速度计和地磁定位误差的统计特性发生变化,则滤波参数不能正确计算,导致组合导航系统出现定位误差;因此通过对Kalman滤波状态量的监测判断各子系统的运行状态,并采取相应的方法来抑制子系统故障导致的组合导航误差,是一种低成本的有效方法。
2 χ2状态检验方法
χ2检验法可实时地确定系统测量信息的有效性[18],因而十分适用于子系统级的故障检测/隔离。χ2检验法是一种通过检验所构造的n维高斯分布随机向量的均值和方差是否与假设值相符而判断是否发生故障的统计假设检验法[19]。根据所构造的随机向量不同而有不同的检验法,其故障检测性能也有所不同。

(3)

设检测函数为
λβ(k)=βT(k)T-1(k)β(k)。
(4)

无故障时为
(5)
有故障时为
(6)

3 仿真实验与结果分析
3.1 分段融合方案
基于以上的基本原理与方法,本文进行了惯性/地磁组合导航智能分段融合方法的仿真实验:基于χ2状态检验方法,对惯性/地磁组合导航系统中地磁信号出现异常的情况进行判断;并依据判断结果,对惯性/地磁数据进行分段融合。分段融合方案如图2所示,通过χ2状态检验方法检测出磁数据异常与否。
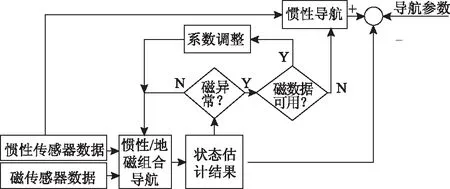
图2 惯性/地磁组合导航智能分段融合方案
图中可见:如果磁数据正常,则在正常阶段运行惯性/地磁组合导航算法;而磁数据异常时,如果磁误差的随机误差特性在合理范围内发生变化,则可以通过实时调整Kalman滤波方程中量测误差的系数来抑制组合系统误差,如果磁数据异常、不可用,则在异常阶段运行惯性导航算法。此方案可避免地磁信号异常时间过长导致的组合滤波结果发散。
3.2 仿真分析
磁数据异常可分为2种情况:一是磁传感器输出信号误差;二是磁场模型误差。此部分仿真暂不考虑磁场模型误差,只根据原子磁强计的精度来确定磁定位误差,并将此误差应用于惯性/地磁组合导航,对惯性/地磁组合导航误差特性进行分析,以验证本项目提出的基于χ2状态检验的智能分段融合方法。由于实验设施和实验环境、费用、耗时等条件的限制,为能在较短时间内对所提出的方法进行验证,并满足具有较高的可信度和逼真度的要求,最终选择进行半物理仿真。
半物理仿真又称半实物仿真,是指针对研究内容,将被仿真对象系统的一部分以实物方式引入仿真回路。与计算机仿真相比,半物理仿真结果具有较高的可信度;而与实际实验相比,又大大节省人力、时间、资金,所以常用来验证系统方案的正确性和可行性[21]。
仿真研究的具体思路如下:
1)用轨迹发生器产生一水下运动轨迹(包括运动轨迹上的全部导航参数)。
2)在轨迹发生器产生的传感器数据真值上叠加传感器噪声数据。在此运动过程中有一段时间的磁传感器输出信号异常。磁传感器数据应用半物理方法产生。半物理数据产生方法为:采集真实传感器的输出数据,求均方差并去掉平均值;将此数据乘以系数得到均方差为0.08 nT(对应10 m定位误差)的正常数据和均方差为0.8 nT(对应100 m定位误差)的数据;把此数据叠加到轨迹发生器产生的定位数据上形成具有真实误差特性的实验数据。陀螺、加速度计的误差数据也是采用此方法生成。
3)分别利用本项目提出的基于χ2状态检验的智能分段融合方法和传统组合方法进行数据融合,并对2种组合方法进行对比分析。
规划载体运动条件为:起始点纬度40°,经度130°,初始高度是水下100 m,初始航向角30°,俯仰角、横滚角都为0°,载体速度5 m/s,航行时间30 min。航行过程中航向变化10°,水平姿态和速度不变。其中,在第15到20 min时磁传感器数据异常、误差很大。惯性导航系统中陀螺仪的漂移为0.01(°)/h,加速度计随机常值为50 μg。正常情况下应用本课题组研制的磁强计能达到的定位精度为10 m;但磁定位异常时位置误差很大且随机变化,仿真中设为正常定位误差的10倍。对以上所设的仿真数据,分别用传统Kalman滤波和本文智能分段融合方法进行处理,得到经度、纬度、高度误差如图3和图4所示。

图3 经度误差
图3及图4中波动较大的细实线是传统Kalman滤波处理结果,趋于平稳的粗实线是采用本文方法处理的结果。由数据可见,在900到1 200 s
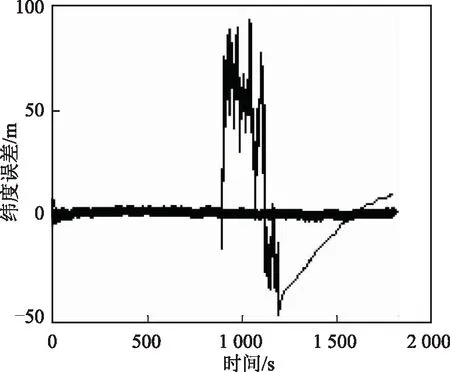
图4 纬度误差
(15到20 min)时间内由于地磁传感器数据异常导致惯性/地磁组合导航系统定位精度下降,而且当地磁数据正常时滤波精度也受到影响。应用χ2状态检验法检测出磁信号量测异常后,调整Kalman滤波器量测量的加权系数,使故障信号对系统影响降低;而当磁信号不可用时,进入惯性导航模式,消除磁信息对定位信号的污染。在不同情况采用不同的加权系数,分段融合,提高了组合系统的可靠性。可见采用本文方法能有效抑制磁数据异常导致的定位误差。
4 结束语
针对地磁传感器信号异常引起组合导航系统出现误差的问题,在对惯性/地磁组合导航系统特点分析的基础上,提出基于χ2状态检验的惯性/地磁组合导航智能分段融合方法,并对该方法进行仿真验证。实验结果证明,本文方法能有效减少磁信号异常引起的定位误差从而提高组合导航精度。为取得更高的定位精度,接下来还需要在建立高精度3维地磁图以及地磁图误差建模与补偿方面展开深入研究。
[1] 李丰阳,贾学东,董明.惯性/视觉组合导航在不同应用场景的发展[J].导航定位学报,2016,4(4):31-35.
[2] 杨春雷.无人机捷联惯性/全光自主组合导航系统研究[J].四川兵工学报,2015,36(11):4-7.
[3] LEE I U,LI H,HOANG N M,et al.Navigation system development of the underwater vehicles using the GPS/INS sensor fusion[C]//The Institute of Electrical and Electronic Engineers(IEEE).Proceedings of 2014 14th International Conference on Control,Automation and Systems(ICCAS 2014).Seoul:IEEE,2014:610-612.
[4] TYREN C.Magnetic anomalies as a reference for ground—speed and map-matching navigation[J].Journal of Navigation,1982,35(2):242-254.
[5] TYREN C.Magnetic terrain navigation[C]//The Institute of Electrical and Electronic Engineers(IEEE).Proceedings of the 1987 5th International Symposium on Unmanned Untethered Submersible Technology.Sweden:IEEE,1987:245-256.
[6] ZHANG Y S,LI C Y,LIU S S,et al.Locating method of geomagnetic/inertial integrated navigation system by forecasting the geomagnetic matching initial value[C]//The Institute of Electrical and Electronic Engineers(IEEE).Proceedings of 2014 IEEE Chinese Guidance,Navigation and Control Conference.Yantai:IEEE,2014:235-239.
[7] LUO H,DENG Z,FU M,et al.A map matching algorithm for inertial navigation systems based on the adaptive projection method[C]//The Institute of Electrical and Electronic Engineers(IEEE).Proceedings of International Symposium on Computational Intelligence and Design.Hangzhou:IEEE,2015:304-308.
[8] THIENEL J,HARMAN R,BARITZHACK I,et al.Results of the magnetometer navigation(MAGNAV) inflight experiment[J].Experimental Brain Research,2006,116(1):97-103.
[9] 郭才发,胡正东,张士峰,等.地磁导航综述[J].宇航学报,2009,30(4):1314-1319.
[10] KAMGAR-PARSI B,KAMGAR-PARSI B.Vehicle localization on gravity maps[C]//International Society for Optical Engineering(SPIE).Proceedings of SPIE 3693.Florida:SPIE,1999:182-191.doi:10.1117/12.354447.
[11] SMITH R,FROST A,PROBERT P.Aspects of heading determination via fusion of inclinometer and magnetometer data[C]//The Institute of Electrical and Electronic Engineers(IEEE).Proceedings of the 8th International Conference on Advanced Robotics(ICAR '97).Monterey:IEEE,1997:739-744.
[12] GRENON G,AN P E,SMITH S M,et al.Enhancement of the inertial navigation system for the morpheus autonomous underwater vehicles[J].IEEE Journal of Oceanic Engineering,2001,26(4):548-560.
[13] 刘颖,吴美平,胡小平,等.基于等值线约束的地磁导航匹配方法[J].空间科学学报,2007,27(6):505-511.
[14] 任治新,罗诗途,吴美平,等.基于改进ICP算法的地磁图匹配技术[J].计算机技术,2008(28):351-354.
[15] 李素敏,张万清.地磁场资源在匹配制导中的应用研究[J].制导与引信,2004,25(3):19-21.
[16] 吴美平,刘颖,胡小平.ICP算法在地磁辅助导航中的应用[J].航天控制,2007,25(6):17-21.
[17] 王可东,陈偲.水下地形匹配等值线算法研究[J].宇航学报,2006,27(5): 995-999.
[18] DRAGANOV S.Detection of biases and faults in navigation sensor measurements[C]//The Institute of Electrical and Electronic Engineers(IEEE).Proceedings of 2016 IEEE/ION Position,Location and Navigation Symposium(PLANS).Savannah GA:IEEE,2016:1008-1014.
[19] YUN S H,KANG C W,PARK C G.Reducing the computation time in the state chi-square test for IMU fault detection[C]//The Institute of Electrical and Electronic Engineers(IEEE).Proceedings of the 14th International Conference on Control,Automation and Systems(ICCAS 2014).Seoul:IEEE,2014:879-883.
[20] 郭鹏,张涛,程农.组合导航系统故障诊断方法设计与实现[J].系统仿真学报,2010,22(增刊1):224-227.
[21] 吴双.半物理仿真系统现状及发展趋势[J].工业仪表与自动化装置,2016(2):16-20.
Anintelligentpiecewisedatafusionmethodofinertial/geomagneticintegratednavigation
DINGBaichao,QUANWei,YANGXu
(School of Instrumentation and Optoelectronic Engineering,Beihang University,Beijing 100191,China)
In order to reduce the positioning errors caused by the abnormal data of the magnetic sensor in inertial/geomagnetic integrated navigation system,the paper proposed an intelligent piecewise data fusion method of inertial/geomagnetic integrated navigation based onχ2state verification:χ2state verification was used to detect the state of filter; and the signal abnormality of the magnetic sensor was judged through the difference between the measurement state and the estimation state; the piecewise data fusion was implemented according to the judging results finally.In the stage of data abnormal,if the magnetic data is available,the errors of system could be suppressed after adjusting the integrated filtering coefficients; if not available,the inertial navigation resolution would be carried out directly.By this way,the intelligent piecewise data fusion method of inertial/geomagnetic integrated navigation could be realized.Simulation result showed that the proposed method could reduce the positioning errors caused by the abnormal data of the magnetic sensor effectively.
integrated navigation; inertial navigation; geomagnetic navigation;χ2state verification; data fusion
2016-11-23
国家自然科学基金项目(61374210,61473019,51574012);天津市智能遥感信息处理技术企业重点实验室开放基金项目(2016-ZW-KFJJ-01)。
丁柏超(1994—),女,黑龙江佳木斯人,硕士研究生,研究方向为惯性技术与导航。
丁柏超,全伟,杨旭.惯性/地磁组合导航智能分段融合方法[J].导航定位学报,2017,5(4):1-5.(DING Baichao,QUAN Wei,YANG Xu.An intelligent piecewise data fusion method of inertial/geomagnetic integrated navigation[J].Journal of Navigation and Positioning,2017,5(4):1-5)
10.16547/j.cnki.10-1096.20170401.
P228
A
2095-4999(2017)04-0001-05
