基于图形处理的人体内异物定位测量系统设计
2018-01-06康秀娟
康秀娟,施 展
(上海理工大学 光电信息与计算机工程学院,上海 200093)
基于图形处理的人体内异物定位测量系统设计
康秀娟,施 展
(上海理工大学 光电信息与计算机工程学院,上海 200093)
临床医学实践中,存留的人体异物会给病人身心带来严重的伤害。因此,快速、准确地对人体内异物进行三维定位,具有重要的研究意义和广泛的应用前景。文中对异物图像预处理、几何校正以及人体异物定位测量等关键技术进行了深入分析和研究,并设计开发了基于Matlab GUI的人体异物图像测量分析软件。该软件系统能实现对医学图像的预处理以及对人体内异物平面位置和深度信息的定量描述,实验结果表明,系统测量误差不超过0.21 mm。
图像处理;几何校正;系统标定;异物定位;采点测距
临床医学中,存留的人体异物对人身心造有极大的危害。虽然目前可以用X线检查等方法判断异物位置,但由于图像不能对异物进行三维定位,经常存在定位不够准确等问题。因此,快速、准确判断伤病员体内异物的位置对提高手术准确率和安全性具有重要意义。
1 人体异物定位测量系统设计
为确定异物在人体内的平面位置和深度信息,需要至少两幅不同角度的异物图像进行测量定位,本文主要通过对两幅人体异物图像的处理与分析来确定异物的三维坐标、大小尺寸等,定量描述人体内异物的平面位置和深度信息。
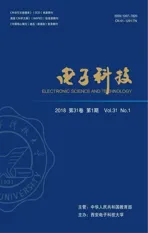
按照系统的功能要求,本文基于图形处理的人体内异物定位测量系统结构主要分为4部分:图像预处理、图像几何校正、系统标定和人体异物定位测量。系统总体设计方案如图1所示。
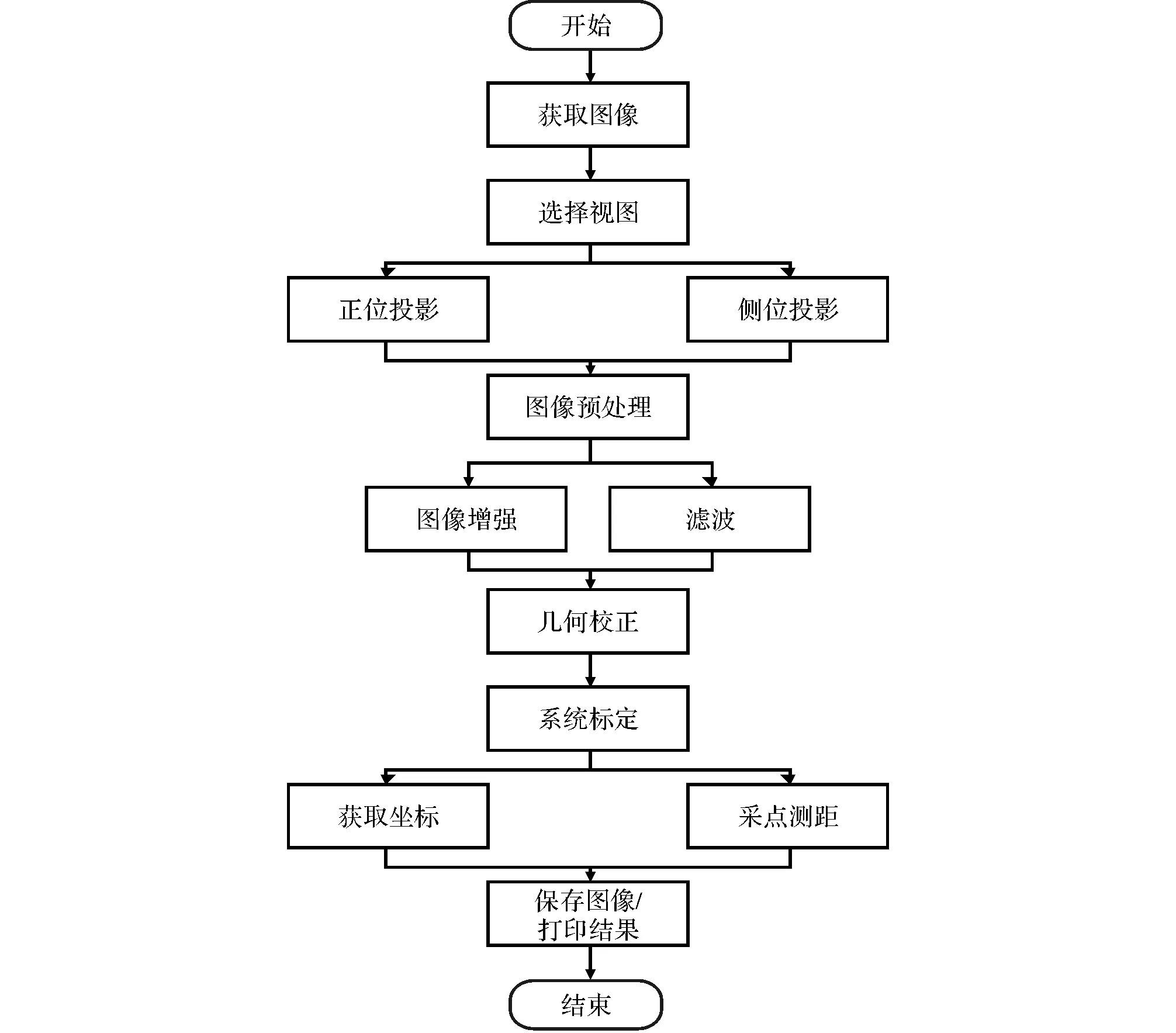
图1 人体异物定位测量系统设计方案
图形用户界面总体设计如图2所示。界面布局主要分为3部分:图像显示区域、操作区域及分析结果输出区域。其中显示区域用于显示异物图像的正侧位投影及处理后图像,两侧操作区域通过功能键实现对图像的各种处理与分析,界面下方为分析结果输出栏,用于显示系统标定系数、异物坐标及采点测距的结果输出。

图2 图形用户界面总体设计
2 图像预处理
本文采用直方图增强的改进算法和自适应中值滤波的改进算法对图像进行预处理,提高图像清晰度和信噪比。
2.1 直方图增强的改进算法
由于直方图均衡算法经常会显著改变图像特征[1-4],本文采用直方图增强的改进算法,将直方图规定化与局部对比度增强相结合,进行图像增强处理。直方图规定化可以修正图像灰度分布,局部对比度增强算法通过处理窗口对图像细节处做局部对比度增强,从而减小对图像细节的损坏。得到的图像在(x,y)处的灰度值可表示为
g′(x,y)=G(x,y)+k(f(x,y)-Mx,y)
(1)
式(1)中,G(x,y)为规定化处理后的灰度值,f(x,y)为图像未处理前(x,y)处的灰度值,Mx,y为处理窗口内所含像素的平均灰度值。k(f(x,y)-Mx,y)为局部对比度增强后的灰度值,相当于一个高通滤波器,起到强化细节的作用。k值根据处理窗口的灰度方差来选取,可表达为
(2)

k=k′(t2-1)
(3)

图3 k值变化示意图
2.2 自适应中值滤波的改进算法
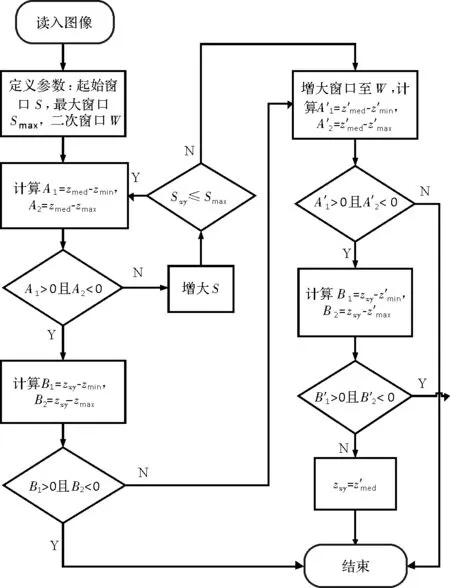
图4 改进的自适应中值滤波算法流程图
3 图像几何校正
由于成像系统具有非线性以及拍摄角度的问题,会使生成的图像存在一定的几何畸变[7]。本文通过空间坐标变换和对非整数处坐标进行双线性插值两个步骤校正畸变。
(1)假设图像为双线性畸变,校正公式为
(4)
式中共有8个参数,可通过图像中的4个点对将系数解出;
(2)空间变化后的像素坐标会产生非整数,因此,坐标变换后还需确定各像素的灰度值。像素灰度内插的方法主要有最近邻点法、双线性内插法和三次内插法3种[8-10]。本文采用双线性内插法对非整数处的坐标进行插值。双线性内插法又称一阶插值法[11],其需要经3 次插值才能获得最终结果,是对最近邻插值法的一种改进[12]。
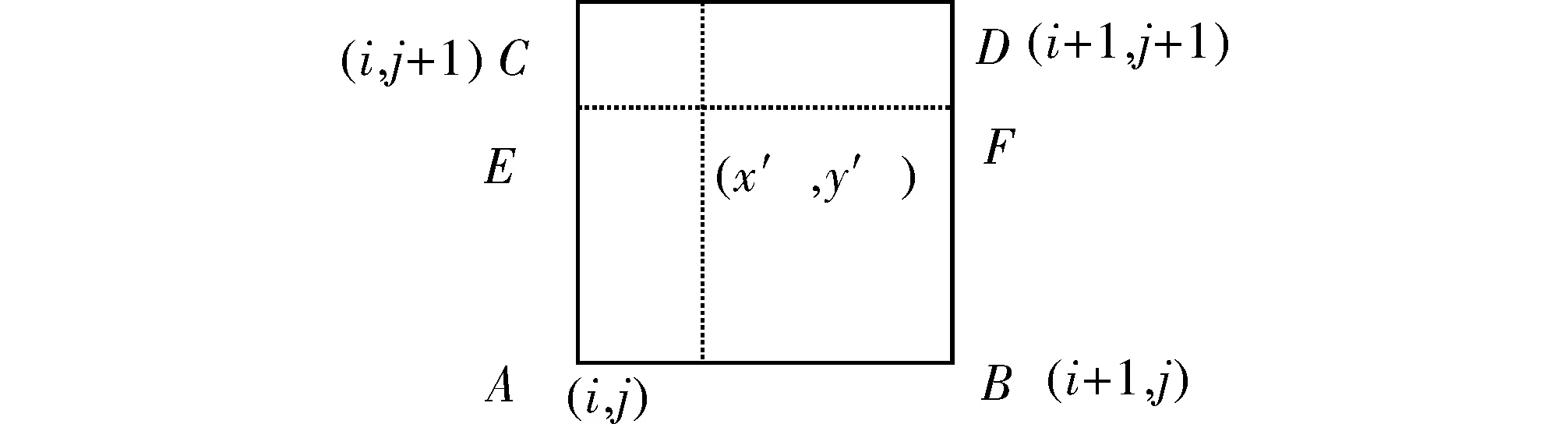
图5 双线性内插法邻近点选择
双线性内插法利用待求像素周围的4个邻近像素在x、y方向上分别做加权线性插值。如图5所示,设(x′,y′)4个邻近像素点为A、B、C、D,其坐标分别为(i,j),(i+1,j),(i,j+1),(i+1,j+1),灰度值分别为g(A)、g(B)、g(C)、g(D),设α=x′-i,β=y′-j。首先计算出E、F两处的灰度值g(E)和g(F)
g(E)=β[g(C)-g(A)]+g(A)
(5)
g(F)=β[g(D)-g(B)]+g(B)
(6)
则(x′,y′)点的灰度值g(x′,y′)为
g(x′,y′)=α[g(F)-g(E)]+g(E)
(7)
g(x′,y′)即为校正后图像中(x′,y′)处的灰度值。
4 系统标定与异物定位测量
系统标定[13]可以实现图像像素点数与实际尺寸的转换。这里将像素与实际尺寸之间的比例关系定义为标定系数k
k=P/L
(8)
式中,L表示被测物体的实际尺寸,单位mm,P表示被测物的像素个数,k表示系统标定系数,单位pixel/mm。
本文通过选取一个标准件的方法,将待测量标准件的精确尺寸与经系统处理后的数字图像的像素个数作比对,根据公式(8)多次实验取平均值,从而计算出系统的标定系数[14-13]。
获取标定系数后,还需建立坐标系,实现像素坐标与物理坐标之间的换算。本文建立图像坐标系如图6所示,将原点规定位于图像的左下角,设O1在u,v坐标系中的像素坐标为(u0,v0),系统标定系数为k,则O1点的物理坐标(x,y)可表示为
(9)
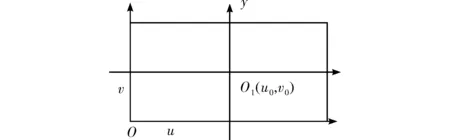
图6 图像坐标系
假设两幅人体异物图像的相位夹角为θ(一般为90°),异物点侧位投影的横坐标为Z′,根据几何变换关系
Z=Z′/sinθ
(10)
可将异物点的三维坐标信息求出。
根据两点间距离公式
(11)
通过采点测距的方式可实现图像中任意两点间距离的计算[15]。
5 系统误差分析
本文选取分辨率为96 dpi,尺寸大小为981×698像素的标准尺寸图像,在图像进行预处理、几何校正及系统标定后,利用采点测距功能对10 mm标准尺寸进行重复测量,10次测量结果和误差分析如表1所示。
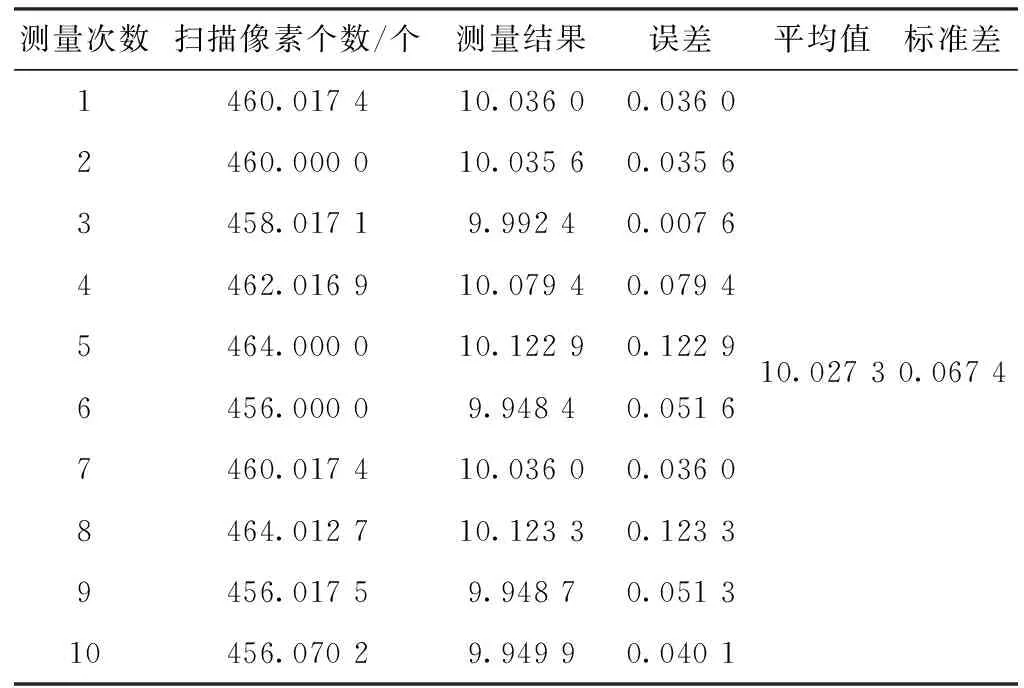
表1 10 mm标准尺寸测量结果 /mm
根据误差理论,极限误差取标准差的3倍时,极限误差δ=0.202 2 mm ,满足人体异物定位测量时的实际要求。
6 结束语
本文介绍了人体异物图像定位测量系统的设计,该设计系统具有图像增强、滤波、系统标定、异物坐标及采点测距等功能。系统误差分析结果表明本文设计软件标定误差较小,尺寸测量比较精确,系统整体测量误差不超过0.21 mm,满足实际要求。
[1] Wang L.Enhancement of medical ultrasonic image based on gray-level histogram equalization[J].Journal of Sichuan University,2002,34(1):105-108.
[2] 龙清.直方图图像增强技术[J].电脑知识与技术,2011,7(4):883-886.
[3] 赵秋宇,王晓红,张德喜.可增强图像细节的改进的直方图均衡化算法[J].信阳师范学院报,2008,21(4):601-602.
[4] 万辉,杨有.一种改进的局部对比度图像增强算法[J].重庆文理学院报:自然科学版,2007,26(3):29-32.
[5] 苟中魁,张少军,李忠富,等.一种基于极值的自适应中值滤波算法[J].红外与激光,2005,34(1):98-101.
[6] 郭海霞,解凯.一种改进的自适应中值滤波算法[J].中国图像图形学报,2007,12(7):1185-1188.
[7] 尹青山.数字图像几何校正方法[J].丹东师专学报,2003,25(3):148-149.
[8] 崔洪州,孔渊,周起勃,等.基于畸变率的图像几何校正[J].应用光学,2006,27(3):183-185.
[9] 郭羽,杨红,杨照金,等.CCD摄像系统镜头的畸变测量[J].应用光学,2008,29(2):279-282.
[10] Lin J M,Xing M L,Sha D G.Distortion measurement of CCD imaging system with short focal length and large-field objective[J].Optics and Lasers in Engineering,2005(43):1137-1144.
[11] 符祥,郭宝龙.图像插值技术综述[J].计算机工程与设计,2009,30(1):141-144.
[12] 唐勋俊.基于图像处理的挤出胎面尺寸控制应用[J].电子科技,2015,28(1):140-144.
[13] 王永皎,郭力争.基于图像处理技术的尺寸测量中边缘定位算法[J].信阳师范学院报,2014,27(1):135-138.
[14] 吴德刚.基于图像处理的零件二维几何尺寸测量算法研究[D].郑州:郑州大学,2011.
[15] 刘浩,韩晶.Matlab R2012a完全自学一 本通[M].北京:电子工业出版社,2014.
A System of Foreign Object Localization Based on Graphics Processing
KANG Xiujuan,SHI Zhan
(School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China)
In the clinical medical practice, small foreign object in the human body has brings to the patient a great impact of the physical and mental. Therefore quickly and accurately to three- dimensional location the foreign object in human body, has significant research value and application prospect. This paper focused on image preprocessing, geometric correction and human body localization carried on the thorough analysis and research,and designed the foreign object measurement and analysis software based on GUI MATLAB. The software system can realize the pretreatment of medical image and the quantitative description of the plane position and depth information of the foreign object. The experimental results show that the system measurement error less than 0.21mm.
image processing; geometric correction; system calibration; foreign object localization; ranging
2017- 02- 23
上海市科学技术委员会科研基金(15110502300)
康秀娟(1993-),女,硕士研究生。研究方向:数字图像处理。施展(1963-),女,副教授。研究方向:测试理论与测试技术。
TP391.41
A
1007-7820(2018)01-071-04