面向交通安全信息主动推送的POI检索设计与实现
2018-01-05程鹏董亚波陈宇峰
程鹏,董亚波,陈宇峰
(1.湖北汽车工业学院 电气与信息工程学院,湖北 十堰 442002;2.浙江大学 计算机科学与技术学院,浙江 杭州 310027)
面向交通安全信息主动推送的POI检索设计与实现
程鹏1,董亚波2,陈宇峰1
(1.湖北汽车工业学院 电气与信息工程学院,湖北 十堰 442002;2.浙江大学 计算机科学与技术学院,浙江 杭州 310027)
设计并实现了交通安全信息主动推送系统,根据车辆位置,通过手机终端将高速公路上的道路交通安全信息主动推送给驾驶员。为满足推送需求设计并实现了一种基于地图投影的兴趣点(Point of Interest,POI)检索算法。首先分析了基于位置服务(Location Based Service,LBS)云检索的工作模式,在此基础上提出一种G_Cell算法,该算法利用高斯投影原理将地图网格化,实现了一种基于位置服务的POI检索算法。实验结果表明:所提出的G_Cell算法比直接计算两点之间的距离算法更稳定、有效。
POI检索;高斯变换;位置信息服务;地图投影
基于位置信息推送服务是指移动终端通过各种定位技术获得当前的位置信息,再利用移动网络将这些信息发送给服务提供商,服务商根据用户的位置信息及需求为用户提供个性化推送服务[1]。针对驾驶员因无法获取交通安全信息而影响出行甚至产生交通事故的情况,设计了“交通安全信息主动推送系统”,根据车辆位置,通过手机终端将高速公路上的道路交通安全信息主动推送给驾驶员。其中交通安全信息包括设施风险、路网状态指数、拥堵信息、道路养护、道路管制、交通事故、恶劣天气等。高速公路上提醒标牌的间距为2 km,因此文中设置检索范围为2 km。为了准确地将交通安全信息推送给用户,除了需要考虑推送范围外,还需判断车辆的行驶方向是否正在靠近交通安全信息所在位置。如果车辆位于推送范围内,但是车辆的行驶方向正在远离交通安全信息所在位置,那么交通安全信息不予播报。为了减少推送平台的计算压力、增加推送效率,将车辆行驶方向是否正在靠近交通安全信息所在位置的判断放在手机终端。平台端只用判断交通安全信息是否在行驶车辆的2 km范围内。车辆通过手机终端上传其经纬度信息给服务器,当交通安全信息所对应的事件位于车辆2 km范围内则将该事件信息通过手机终端主动推送给驾驶员。这需要根据车辆的实时位置,查找其2 km范围内的事件点,实现基于位置信息的POI检索。系统中,为实现实时性,车辆每隔10 s上传一次位置信息,同时进行一次检索运算。
现有的基于位置信息POI检索是根据用户输入的关键字,搜索和该关键字相关的POI,按照和用户输入字符串的匹配程度,由高到低把这些POI呈现给用户[2]。高速公路上车辆在高速行驶,需要将车辆2 km范围内的交通安全信息及时、主动推送给驾驶员。如果驾驶员利用手机终端手动输入关键字的方法来检索2 km范围内的交通安全信息,那么这个手动输入的过程会造成交通安全信息推送不及时,并且不利于驾驶员安全驾驶。因此这种通过关键字来实现POI检索的模式不适合应用在文中高速公路的场景。基于此,文中首先提出利用高斯投影实现POI检索,但是这种算法面临着大量的指数运算。因此,在高斯投影的基础上做出改进,并针对本系统的实际需求提出了G_Cell算法。
1 工作原理

图1 POI检索算法框图

图2 检索矩形
面向交通安全信息主动推送的POI检索算法如图1所示。检索算法决定了在手机终端推送事件点信息的条件。当终端位于事件点信息2 km的范围内,则将事件点信息推送给手机终端。为了便于设计,采用边长为4 km的矩形来代替直径为4 km的圆。该系统接收手机终端的经纬度信息设为点A,将点A输入到推送算法模块中,其输出是一个以点A为质心、边长为4 km的检索矩形,如图2所示。点A是手机终端的位置,其经纬度信息是经过手机终端上传得到的。通过推送算法模块可以得到点B~E的经纬度。此时可以利用点B~E构成的检索矩形在交通安全信息数据库中检索驾驶员所需要的事件点信息,如果驾驶员所需要的事件点信息的经纬度处于检索矩形的范围内,则将该事件点信息推送给手机终端。
推送算法流程如图3所示。其中高斯正算的功能是将手机终端的经纬度坐标转换成平面坐标;检索矩形构造模块是在平面坐标系中利用点A的位置,结合点B~E的方位角以及它们与点A的距离,算出点B~E的平面坐标;高斯反算的功能是将点B~E的平面坐标转换成经纬度坐标。事件检索的功能是利用点B~E的坐标从交通安全信息数据库中检索车辆2 km范围内的事件信息。
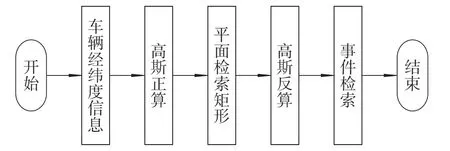
图3 推送算法流程图
2 高斯投影
检索算法中高斯正反算理论基础为高斯投影。
2.1 地图投影
所谓地图投影就是将椭球面上的元素点、线、面按照一定的条件投影到平面上[3]。由于地球是一个不可展曲面,所以在投影过程中会产生投影变形。投影变形分为长度变形、角度变形、面积变形,对应的投影方式为等长投影、等角投影、等积投影。
等角投影主要有2个性质[4]:1)保角性,即投影前后角度保持不变;2)伸长的固定性,即投影前后长度的变化是固定的,这种变化是按照一定的比例关系发生变化的。我国在实际测量中采用等角投影正是基于此,既可以保证小范围内的图形在投影前后是相似的,又可以免去大量的角度投影换算工作,文中介绍的高斯投影为等角投影的一种。
2.2 高斯投影
地球旋转椭球面是一个不可展曲面,根据高斯投影的保角性,地球旋转椭球面在展开成平面的过程中,需要借助一个可展曲面如图4所示。想象有一个椭球柱面套在地球旋转椭球面外面,而且与地球椭球面的某一子午线相切,这条子午线称为中央子午线,椭圆柱的中心轴通过椭球体中心,然后利用中心投影的方法,将中央子午线两侧一定范围内的区域投影到椭圆柱面上,再将这个椭圆柱面沿着母线展开即高斯投影面[5]。在投影过程中,被投影的图形会产生形变,离中央子午线越远形变就越大[2]。利用高斯投影将地球旋转椭球面这样一个不可展曲面投影到平面。

图4 高斯投影示意图
2.3 分带投影
为了解决离中央子午线越远形变越大的问题,提出了分带投影的概念。分带投影,即按照一定的经差,利用经线将投影面分成若干个投影带,如按照6°经差,可以把全球分成60个区域,按照3°经差,可以把全球划分成120个区域[6]。然后按照各投影带分别独立进行高斯投影。文中按照6°经差进行划分,那么整个椭球分成60个投影带,编号为1~60。投影分布图如图5所示。
文中采用6°带划分,选取其中一个投影带如图6所示。由图6可知,正形投影有如下特征[7]:1)中央子午线和赤道投影后为一条直线,并且保持相互垂直,体现了正形投影的保角性;2)除中央子午线和赤道外,其他经线和纬线均为曲线;3)位于中央子午线两侧的经线,在经差相等的情况下,这2条经线的投影是关于中央子午线的投影是对称的。

图5 投影分布图
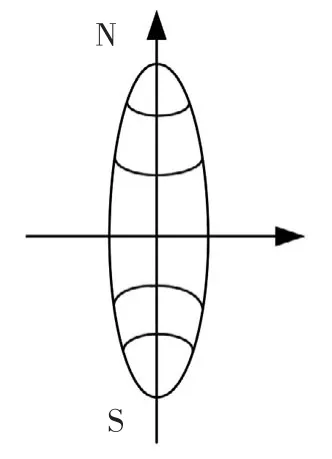
图6 投影带图
根据上述正形投影必须满足的3个条件推导出高斯正算的公式为[8]

高斯反算公式为

式中:X为纬度B对应的子午线弧长,m;N为所求点对应的卯酉子午线半径;B和l单位为rad。
以图2中点A为例,先根据式(1)~(2)将点A的经纬度坐标转化成平面坐标,再根据点B~E与点A的距离以及方位角算出点B~E的平面坐标,最后根据式(3)~(4)算出点B~E的经纬度坐标。
3 地图网格化
高斯正反算所涉及的式(1)~(4)需要进行指数运算,耗时较多。如果服务器每隔10 s计算运行一次上述公式,消耗了服务器资源同时又增加了服务器的响应时间。基于此,提出基于地图网格化的G_Cell检索算法,将圆形区域检索近似为矩形区域检索,即将指数运算用加减运算来近似。
首先利用高斯投影原理计算出球面上不同位置2 km对应经度差和纬度差。经纬度差值见表1。
然后利用经纬度差值表来实现地图网格化。球面经纬网分如图7所示。由于球面上每隔2 km对应纬度差不变,经度差与纬度相关。因此地图网格划分如下:纬度每相差1°视为1格,北纬20.5°和21.5°之间的区域W视为1格、北纬21.5°和北纬22.5°之间的区域S视为1格。以图2中的点A为例,假设点A位于区域W内,由于球面上任意位置的纬度差相等,根据表1中2 km对应的纬度差,可以计算出点B~E的纬度;点A位于图中北纬20.5°和北纬21.5°的区域W内,首先将点A的纬度值四舍五入为21°,然后在表1中查找北纬21°带2 km对应的经度差,可以计算出点B~E的经度。
如表1所示,在球面上任何地方相差2 km的纬度差值是相等的。随着纬度增加,对应2 km的经度差值在增加。当终端位置的纬度不为整数的时候,采用四舍五入的方法,这样做给经度差的计算带来误差。通过实验数据分析,由四舍五入带来的误差从4°带到53°带依次递增。4°带最大误差为0.01 km;53°带最大误差为0.048 km。而实际是要求手机终端在服务信息2 km的范围内完成推送。最高误差为2%,满足实际应用要求。

表1 经纬度差值表 (°)

图7 球面经纬网图
4 算法实现与效果分析
为验证文中提出的面向交通安全信息主动推送POI检索的有效性,将该算法部署到服务器上进行测试,服务器配置为64位Win7操作系统、4.00 GB内存、1TB硬盘、CPU3.40GHz。先根据文中正形投影必须满足的3个条件推导出式(1)~(2),然后计算表1中2km对应的经纬度差实现地图网格化,最后利用地图网格实现POI检索算法;根据网格和车辆位置计算图2中点B~E,再查询数据库中事件位置是否在该4个点所构造的矩形中。
本算法与对照算法相比的效果如表2所示。对照算法是直接根据2点的经纬度计算车辆与事件之间的距离,利用2点的经纬度通过式(5)~(12)计算得到手机终端和事件的距离。

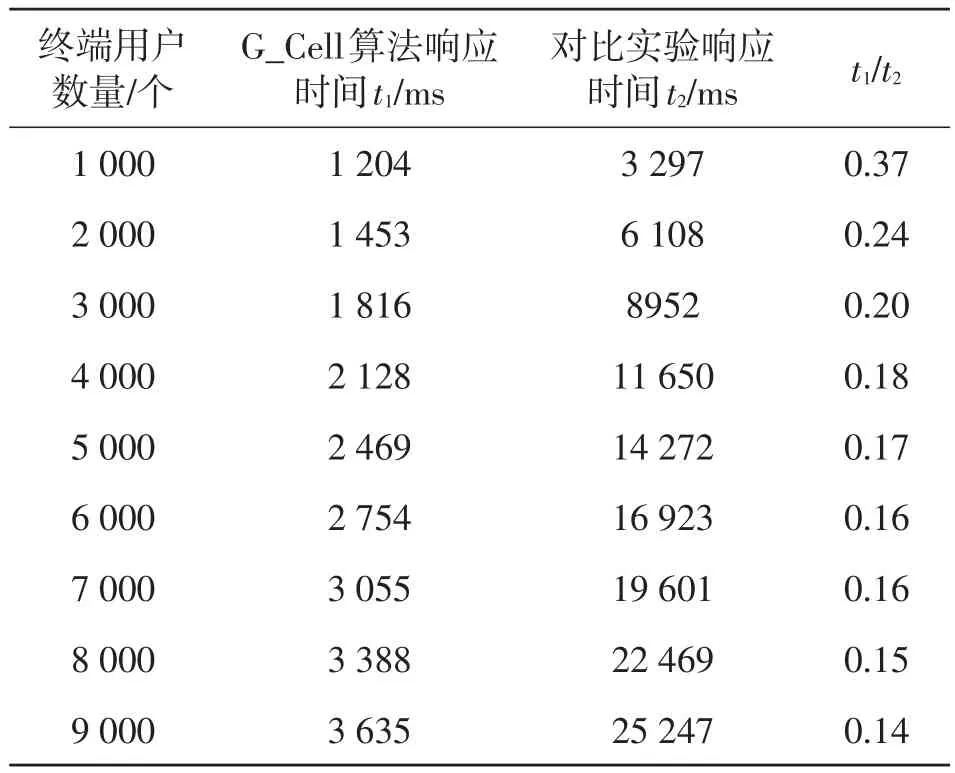
表2 算法效率对比表

表2数据表明:采用G_Cell算法的服务器响应时间t1,采用直接计算2点之间距离算法的服务器响应时间t2,随着终端数量增多,t1与t2的比值越来越小,一方面说明了G_Cell算法的有效性,另一方面体现了G_Cell算法的稳定性。
通过分析推送算法响应时间发现,当手机终端的数量达到9 000个时,响应时间不到4 s。按极限情况来算,在高速公路上汽车以120 km·h-1行驶时,车辆在4 s的时间内行驶了0.13 km左右。按照手机终端在服务信息2 km的范围内完成推送要求,0.13 km的推送延时对用户的体验影响并不大。
5 结束语
文中设计并实现了面向交通安全信息主动推送的POI检索,通过地图网格化将基于高斯投影的指数运算用基于地图网格的加减运算来近似。从服务器的响应时间来分析,G_Cell算法能够满足同时在线的用户数量小于10 000的推送需求。未来可以考虑将保存于数据库中的事件按照位置划分到纬度带中,在检索时仅检索车辆位置所在纬度带的事件,以减少检索量。
[1]洪文菊,苟刚,薛现斌.基于位置服务的移动GIS[J].计算机系统应用,2017(4):1-3.
[2]刘希骞.基于Android手机定位系统的设计与实现[D].曲阜:曲阜师范大学,2016:8-12.
[3]刘健,刘高峰.高斯-克吕格投影下的坐标变换算法研究[J].计算机仿真,2005:1-3.
[4]陈成,金立新,李厚朴,等.等距离球面高斯投影[J].测绘通报,2017(10):1-6.
[5]盛珍.基于Android平台的LBS应用系统开发技术研究[D].昆明:云南大学,2012:21-24.
[6]胡圣武.对高斯投影分带的研究[J].地理空间信息,2012,10(1):54-56.
[7]王守康.高斯正形投影平面直角坐标系在工程测量中的应用[J].甘肃科技,2014,30(16):31-32.
[8]高伟,吴文凯,袁超.高斯投影坐标变换[J].钢铁技术,2008(1):3-5.
Design and Implementation of POI Retrieval of Active Push System for Traffic Safety Information
Cheng Peng1,Dong Yabo2,Chen Yufeng1
(1.School of Electrical&Information Engineering,Hubei University of Automotive Technology,Shiyan 442002,China;2.College of Computer Science and Technology,Zhejiang University,Hangzhou 310027,China)
A Traffic Safety Message Pushing System was designed to push traffic safety information on the highways to the drivers through the terminal,based on the location of the vehicle.In order to push the information efficiently,POI(Point of Interest)searching algorithm based on map projection to the system were designed and applied.In the thesis,the work patterns of LBS(Location Based Service)cloud retrieval was analyzed firstly,and an algorithm of G_Cell was proposed based on the analysis.An LBS-Basing POI was achieved based on the map meshed by Gauss projection.The experiment results show that the proposed G_Cell algorithm is stable and effective than the direct calculation of the dis⁃tance between two points.
POI retrieval;Gaussian transformation;location information service;map projection
TP311.1
A
1008-5483(2017)04-0062-05
10.3969/j.issn.1008-5483.2017.04.014
2017-06-04
国家科技支撑计划课题(2014BAG01B03);湖北省自然科学基金重点项目(2013CFA054);
湖北省自然科学基金项目(2014CFB287);湖北省教育厅科学技术研究计划重点项目(D20141804);
汽车动力传动与电子控制湖北省重点实验室开放基金(ZDK1201406)
程鹏(1991-),男,湖北黄冈人,硕士生,从事车联网、汽车电子信息等方面的研究。E-mail:qcxy_cp@163.com
董亚波(1974-),男,浙江宁波人,博士,从事移动计算、无线传感网方面的研究。E-mail:dongyb@zju.edu.cn
