永磁同步电机3种速度调节方式的比较
2018-01-05
(湖北汽车工业学院 电气与信息工程学院,湖北 十堰 442002)
永磁同步电机3种速度调节方式的比较
罗成,黄海波,梅建伟,陈宇峰,车凯,简炜
(湖北汽车工业学院 电气与信息工程学院,湖北 十堰 442002)
针对传统PID控制下的永磁同步电机响应速度慢和稳态性能差的问题,对分段PI调节、模糊PI控制与传统PID控制进行对比实验,从仿真结果可以看出:分段PI调节和模糊PI控制使永磁同步电机控制系统的抗干扰能力得到提高,增强了鲁棒性。
永磁同步电机;PID;仿真
20世纪70年代西门子工程师F.Blaschke首先提出异步电机矢量控制理论来解决交流电机转矩控制问题[1]。文中采用空间矢量控制和转速外环电流内环的双闭环控制,使电机能迅速达到指定转速并保持稳定。永磁同步电机控制系统是一个强耦合的非线性系统,需要建立准确的数学模型,如果PI控制器参数设置不当将直接影响控制系统的性能[2]。传统PID控制算法虽然能对电机转速起到一定的调节作用,但抗干扰能力和动态性能改善效果不明显。1965年美国加利福尼亚大学Zadeh教授提出模糊系统理论[3],模糊控制被广泛应用于控制领域。文中采用分段PI调节和模糊PI调节进行仿真实验。
1 分段PI控制
PID控制器是一种线性控制器,原理如图1所示,根据给定值rin(t)与实际输出值yout(t)构成控制偏差:

图1 PID控制原理框图

PID的控制规律为

式中:kp为比例系数;Ti为积分时间常数;Td为微分时间常数。
传统转速PI控制环和电流PI控制环虽然可以对电机的转速进行调节,但因为永磁同步电机属于非线性、强耦合系统,在实际调速过程中受外界因素干扰影响大,电机转速是动态变化的,因此如果使用单一PI参数进行电机的转速调节,未必能对电机的转速实施精确有效的控制[4]。通过分段式PI调节器可以有效改善电机在不同转速的动态特性。因为实验条件的限制,本次研究只对转速1 000 r·min-1的低转速进行研究。仿真所用电机参数如表1所示,通过搭建电机仿真模型,多次仿真实验发现在此电机参数下,转速为1 000 r·min-1时所得到的PI参数在转速为200 r·min-1的时候转速曲线波动大,且不稳定。通过实验测试方法得到一组新的PI参数适用于转速为200 r·min-1的情况。分段可以对电机实现更精确的控制,但是分段太细会增加计算量,综合考虑,以200 r为一段比较合适。分段式PI调节器模型如图2所示。以给定的转速为参考,通过开关进行选择,切换到合适的PI参数值。表2为分段PI控制各环PI参数。
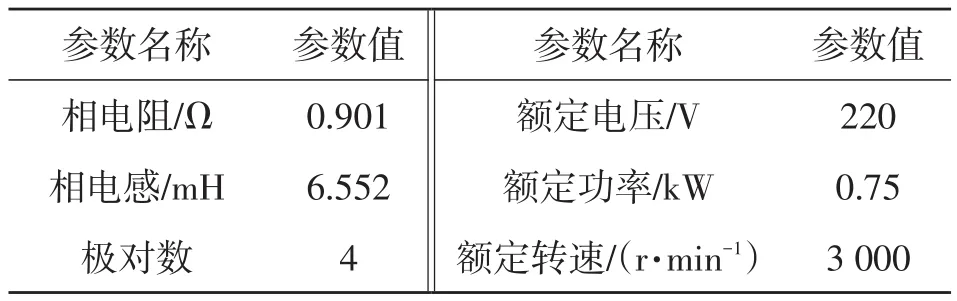
表1 永磁同步电机参数
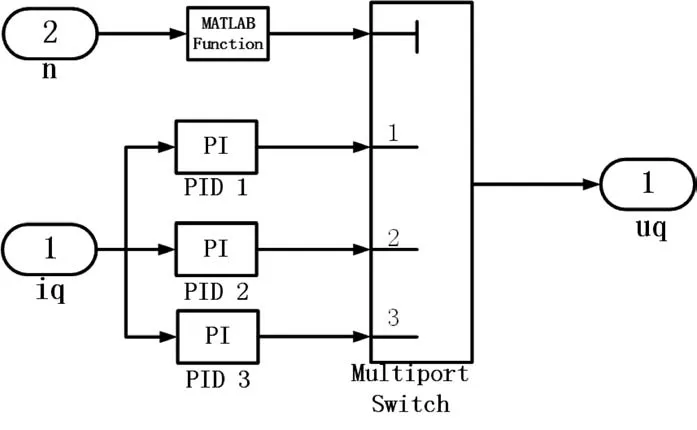
图2 分段式PI调节器模型

表2 分段PI控制各环PI参数
电机的状态方程为
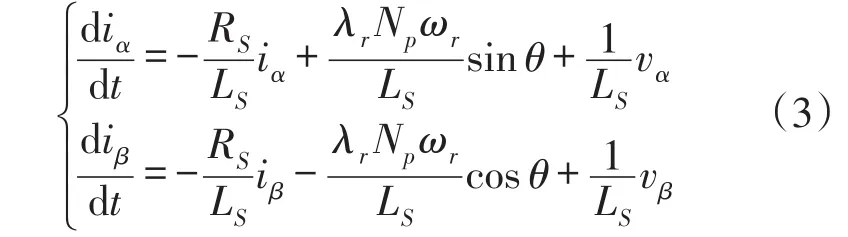
式中:RS为电机定子相电阻;LS为电机定子相电阻电感;iα,iβ,vα,vβ为定子两相静止坐标系定子绕组电流和电压;λr为转子永磁体磁链;ωr为转子速度;Np为电机的极对数。
永磁同步电机矢量控制系统通常采用转速外环、电流内环的PI控制器。
2 模糊PI控制
模糊控制作为智能控制的重要分支,其控制策略简单并且控制效果好[5]。模糊控制技术是以模糊数学知识作为其理论基础,并结合计算机与经典控制理论等技术基础而形成的一种先进智能控制方法。模糊控制系统框图如图3所示。

图3 模糊控制系统框图
在进行模糊控制时需要制定相应的模糊控制规则表,表3即永磁同步电机仿真所用到的模糊控制规则表。E、EC和U分别为模糊集合。
通过表3的模糊控制规则可知,可以写成
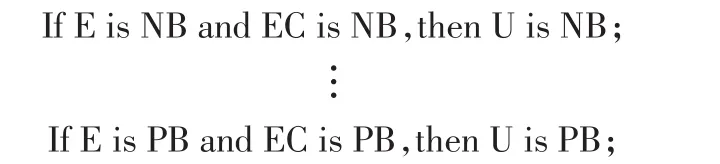
共计49条规则。E采用高斯隶属函数;基本论域为[-6,+6],EC采用高斯隶属函数;基本论域为[-1000,+1000],U采用三角形隶属函数;基本论域为[-50,+50]。
图4 a是模糊控制器仿真结构图。虽然模糊控制相对于传统PI调节有一定优势,但在控制稳态误差方面效果不好,单纯模糊控制没有加入积分模块。如图4 b所示为改进后的模糊PI调节器,增加了积分模块,在仿真实验中将转速环采用模糊PI调节,采用模糊PI调节器仿真结构(图4 b)。观察电机转速,有效地抑制电机起步时的超调[6],并且增强了鲁棒性,达到调节目的,因此电流环采用传统PI调节。

图4 控制器仿真结构图
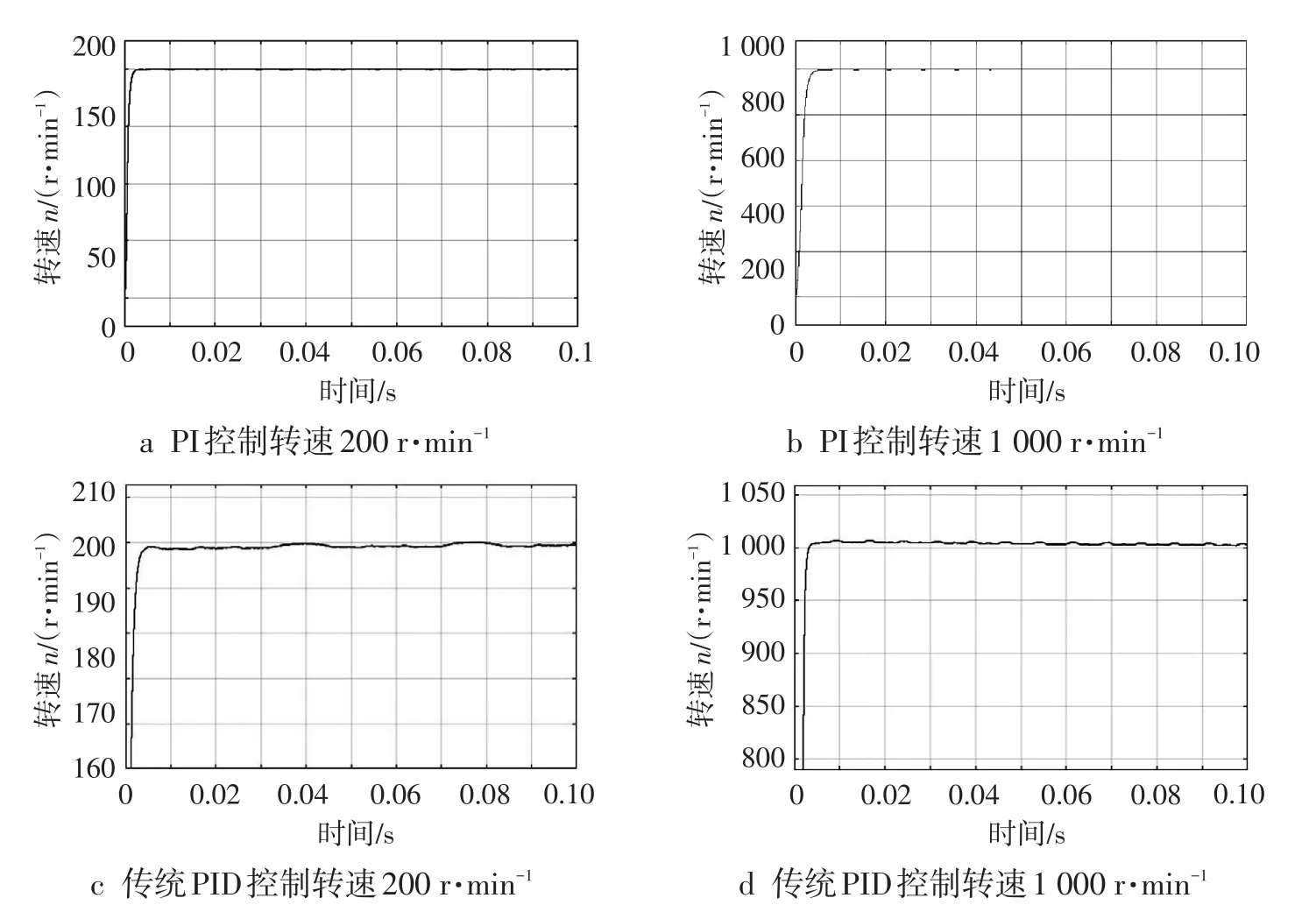
图5 不同控制、不同转速下电机转速波形图
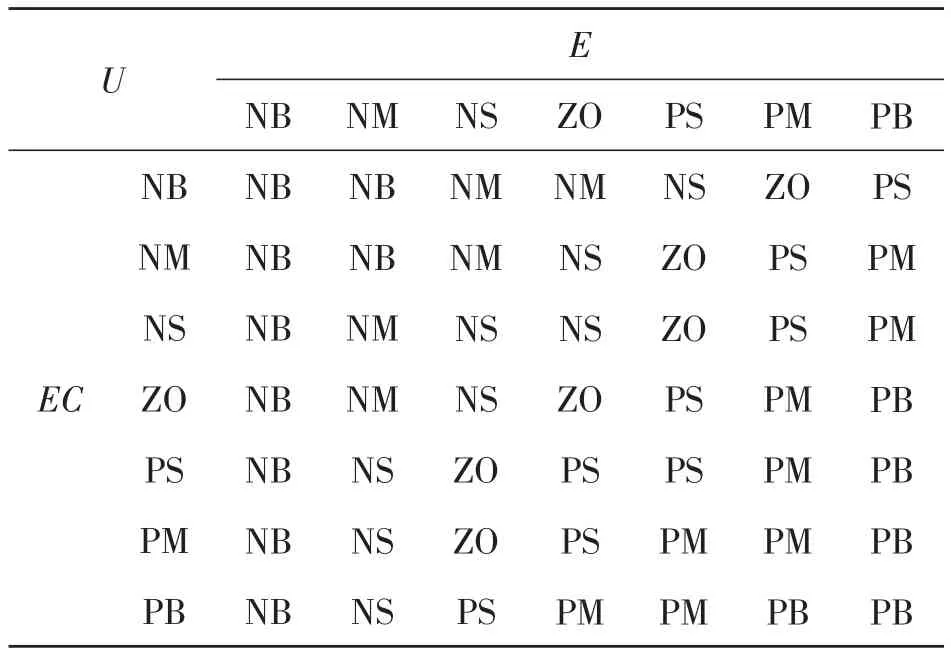
表3 模糊控制规则表
3 仿真实验
3.1 分段PI调节仿真波形
分段PI控制下给定转速为200 r·min-1和1000r·min-1所得到的转速图像如图5a~b所示。通过分段PI调节,电机在低转速200r·min-1和高转速1000r·min-1下都能较快地响应,只需要0.01s便可达到指定转速,响应速度较快,且到达指定转速后没有超调,稳定以后转速几乎没有波动,稳定性较好。转速为200r·min-1时用转速为1000r·min-1的PID参数所得波形见图5c,转速为1000r·min-1时用转速为200r·min-1的PID参数所得的波形如图5d所示,根据转速曲线可看出转速并不稳定。
3.2 模糊PI调节仿真波形
图6是在传统PI控制和模糊PI控制所得转速波形,对比可看出:在给定转速都为1 000 r·min-1的情况下,传统PID调节存在超调,且在0.05 s时,电机突然加负载到2 N·m,传统PID控制调整时间长,但通过模糊化处理后的PI控制在电机起始过程开始时的转速超调得到了有效的抑制,响应速度较快,到达指定转速不到0.01 s,且在0.05 s时突然加载,电机转速过渡平稳,转速较快恢复平稳,抗干扰性好,鲁棒性好。

图6 不同控制所得转速波形图
4 结论
文中分析了在Matlab/Simulink环境下搭建的PMSM空间矢量脉宽调制模型,对于采用了双闭环控制和工业控制上常用的PID算法进行了优缺点分析,提出了更加优化的分段PI调节算法和模糊PI调节算法,仿真结果分析表明:2种改进控制使得电机的响应速度较快,鲁棒性和抗干扰性增强,稳定性较好。
[1]矢量控制理论介绍[J].变频器世界,2006(5):94-94.
[2]王莉娜,朱鸿悦,杨宗军.永磁同步电动机调速系统PI控制器参数整定方法[J].电工技术学报,2014,29(5):104-117.
[3]周景振,韩曾晋.模糊控制理论与应用研究进展[J].自然杂志,1997(3):156-159.
[4]丁文,高琳,梁得亮,等.永磁同步电机矢量控制系统的建模与仿[J].微电机,2010(12):66-71.
[5]卞延庆,庄海,张颖杰.基于模糊PI的永磁同步电机矢量控制研究[J].微电机,2015(11):62-66.
[6]董育亮.分段模糊PI控制在无刷直流电机中的应用研究[D].安徽农业大学,2013:12-15.
Comparison of Three Kinds of Speed Modulation Modes of Permanent Magnet Synchronous Motor
Luo Cheng,Huang Haibo,Mei Jianwei,Chen Yufeng,Che Kai,Jian Wei
(School of Electrical&Information Engineering,Hubei University of Automotive Technology,Shiyan 442002,China)
Aiming at the problem of slow response and poor steady-state performance of the PMSM un⁃der the traditional PI control,comparative experiments on the piecewise PI controller,the fuzzy PI con⁃troller and the traditional PID controller were carried out.From the results of simulation,the piecewise PI controller and the fuzzy PI controller can improve the anti-interference ability and robustness of the PMSM control system.
PMSM;PID;simulation
TM341
A
1008-5483(2017)04-0071-04
10.3969/j.issn.1008-5483.2017.04.016
2017-09-02
湖北省科技支撑计划项目(2015BAA049);湖北省自然科学基金项目(2014CFB378);
湖北省教育厅科学研究计划重点项目(D20171802)
罗成(1994-),男,湖北武汉人,硕士生,从事节能与新能源汽车方面的研究。E-mail:49578434@qq.com
简炜(1961-),男,湖北丹江口人,教授,博士,从事系统工程研究。E-mail:19850036@huat.edu.cn
