参数不确定性离散系统的鲁棒性能分析
2018-01-05程佳欣李宜丹
程佳欣,李宜丹
参数不确定性离散系统的鲁棒性能分析
程佳欣,李宜丹
针对参数不确定性离散系统,结合Schur补引理和线性矩阵不等式研究离散系统的鲁棒稳定性,得到参数不确定性离散系统稳定的性能指标满足的条件,并证明了该方法的合理性.
离散系统;鲁棒稳定;二次稳定;二次D-稳定;Schur补引理
在控制问题的实际应用过程中,为了优化控制效果,对于控制系统的要求不仅要有较好的稳定性能,还要有较好的动态性能,例如尽可能小地调节力度等[1-4].通过将闭环系统的极点配置在复平面上的特定区域中可以达到这些过渡过程动态性能的要求[5-7].为此,结合闭环系统动态性能来考虑,文章针对参数不确定性离散系统,利用圆盘的特性,结合连续系统的鲁棒稳定性分析,来研究离散系统的鲁棒稳定性分析,得到参数不确定性离散系统稳定的性能指标满足一定条件的具体证明过程[8-12].
1 问题描述
考虑由以下状态方程描述的离散系统.

其中,x∈Rn是系统的状态向量,Δ∈Ri×j是一个反映模型参数不确定性的位置矩阵,并假定其满足ΔTΔ≤I,A、H和E是具有适当维数的未知矩阵,x0=x(0)是系统的初始条件.

其中,Q=QT>0.
考虑复平面上中心在-α+j0,半径为r的圆盘D(α,r),圆盘D(α,r)总是位于系统的稳定区域中.因此,对该离散系统有-1<-α+r<1.
定义1[1]对给定的圆盘D(α,r)和系统(1),如果存在正定矩阵P,使得对所有满足ΔTΔ≤I的不确定矩阵Δ,满足

则系统(1)称为是二次D-稳定的.
定义2[1]对给定的圆盘D( )α,r,系统(1)和性能指标(2),如果对所有满足ΔTΔ≤I的Δ,对称正定P满足则矩阵P称为是系统(1)的一个二次D-性能矩阵.

以下定理揭示了二次D-性能矩阵的作用和性质.
2 主要成果
定理1 若不确定系统(1)存在一个二次D-性能矩阵P,则该系统是二次D-稳定的.且系统的性能指标满足
1.6 统计学分析 采用SPSS 17.0统计软件进行统计分析,计量数据采用表示,计数资料比较采用χ2检验,计量资料采用t-检验。分析各组数据与临床妊娠率的关系,各项精液参数指标采用多因素Logistics回归分析,P<0.05为差异有统计学意义。

反之,如果系统(1)是二次D-稳定的,则系统必存在一个二次D-性能矩阵.
证明 假定矩阵P是系统(1)的一个二次D-性能矩阵,则从定义1和定义2即可得到系统(1)是二次D-稳定的.根据定义2和矩阵的Schur补性质,对所有允许的不确定性使得

成立.从而,对所有允许的不确定性有

成立,即
故系统(1)是二次稳定的.
定义V(x)=xTPx,则沿系统(1)的任意轨迹对V(x)进行差分有

因此有

对上式从k=0到k=∞求和,并利用系统的二次稳定性,得到

由此可以得到系统性能的上界(3).
反之,若系统(1)是一个二次D-稳定的,则根据定义1,存在一个对称正定矩阵P,使得对所有允许的不确定矩阵Δ,矩阵不等式

成立.对固定的矩阵Q>0,一定存在一个足够大的常数ρ,使得对所有允许的不确定矩阵Δ,以下的矩阵不等式成立.

定义̂=ρP,则矩阵P̂是正定的,且根据定义2,该矩阵就是系统(1)的一个二次D-性能矩阵.假设成立.
注意(3)式给出的性能上界依赖于初始状态x0,为避免上界对个别初始状态的依赖,选择用确定性方法,即假定系统的初始状态是未知的,但在集合中,U是一个给定的矩阵.
定理2 对给定的圆盘D( )α,r,系统(1)存在一个二次D-性能矩阵当且仅当存在标量ε>0和一个对称正定矩阵V,使得下面的线性矩阵不等式成立.

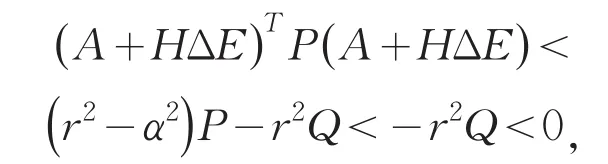
证明 根据定义2,系统(1)存在一个二次D-性能矩阵P,当且仅当对所有允许的不确定性,矩阵不等式(4)成立.容易验证矩阵不等式(4)等价于

该不等式可以重新写成
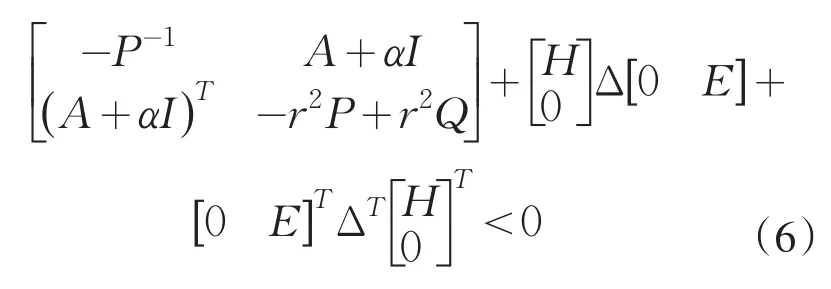
不等式(6)对满足ΔTΔ≤I的所有不确定矩阵Δ成立,当且仅当存在标量ε>0,使得
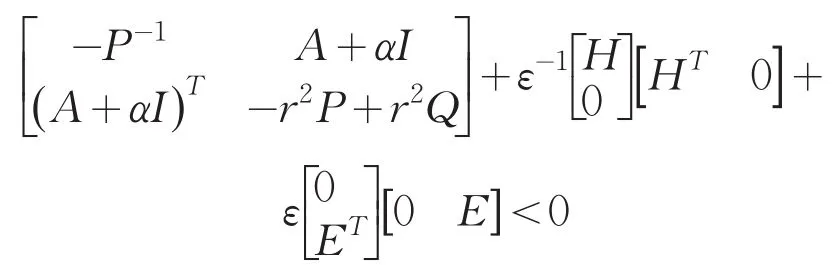
成立,即

对上式分别左乘和右乘矩阵
得到

记V=εP-1,应用矩阵的Schur补性质,可得上式等价于矩阵不等式(5).
从证明可以知道,如果,是线性矩阵不等式(5)的一个可行解,则P=-1是系统(1)的一个二次D-性能矩阵.因此,离散系统的系统性能上界为
其中λmax(.)表示矩阵(.)的最大特征值.
3 结论
本文在连续系统的基础上,讨论离散系统的鲁棒性能分析,由系统的二次稳定得出系统的二次D-稳定,结合线性矩阵不等式和离散系统的特性,得到系统是二次D-稳定的性能指标,给出了系统存在一个二次D-性能矩阵条件的具体证明过程.
TP13
A
1008-7974(2018)01-0032-03
10.13877/j.cnki.cn22-1284.2018.02.009
2017-08-30
程佳欣,女,吉林扶余人,吉林师范大学数学学院硕士研究生(吉林 长春 130000).
[1]俞立.鲁棒控制——线性矩阵不等式处理方法[M].北京:清华大学出版社,2002.
[2]褚健,俞立,苏宏业.鲁棒控制理论及应用[M].杭州:浙江大学出版社,2000.
[3]俞立,王万良,褚健.不确定时滞系统的输出反馈稳定化控制器设计[J].自动化学报,1998,24(2):225-229.
[4]杨冬梅,张庆灵,姚波.广义系统[M].北京:科学出版社,2004.
[5]俞立.线性系统的鲁棒D稳定性分析[J].自动化学报,2001,27(6):860-862.
[6]俞立.具有闭环区域极点约束的鲁棒协方差输出反馈控制器设计[J].自动化学报,2002,28(5):260-264.
[7]俞立,陈国定,杨马英.不确定系统鲁棒输出反馈区域急电配置[J].控制理论与应用,2002,19(2):244-246.
[8]苏西伟.不确定广义时滞系统的论镇定与控制研究[D].沈阳:东北大学,2011.
[9]叶菲.时滞奇异摄动系统的稳定性分析[D].杭州:杭州电子科技大学,2013.
[10]彭高丰.不确定时滞系统的稳定性分析及鲁棒可靠控制[D].长沙:湖南师范大学,2009.
[11]高金凤.不确定时滞系统的鲁棒稳定与镇定研究[D].杭州:浙江大学,2008.
[12]海泉.线性奇异系统的鲁棒稳定性及控制研究[D].呼和浩特:内蒙古师范大学,2011.
陈衍峰)
