MCU+DSP的LFMCW雷达信号处理系统设计*
2018-01-04,
,
(陆军勤务学院 军事物流系,重庆 401311)
MCU+DSP的LFMCW雷达信号处理系统设计*
王斯盾,刘鹏
(陆军勤务学院 军事物流系,重庆 401311)
提出了一种基于C8051F120+TMS320F28335的LFMCW雷达信号处理系统设计方案。该方案以C8051F120为信号采集核心,生成调制电压信号,驱动雷达传感器产生差频信号,并对差频信号进行信号调理与采集。以TMS320F28335为信号处理核心,嵌入基于相频匹配的频率估计算法对差频信号进行处理,得到测量距离。在线实验结果表明,系统各功能模块工作正常,相频匹配算法测量精度较高。
LFMCW;信号处理;C8051F120;TMS320F28335
引 言
线性调频连续波(Linear Frequency Modulated Continuous Wave,LFMCW)雷达具有最小测量距离近、测量精度高、受自然环境影响小等特性,广泛应用于液位测量、无人驾驶、警戒监控等领域[1]。近年来大量学者从时域[2]、频域[3]、时频分析[4]等多个角度研究了LFMCW雷达信号处理算法,但是限于实验条件,大部分算法难以在线实验。现有的雷达信号处理系统主要基于DSP、FPGA或MCU。其中DSP具有较强的浮点运算能力,能够运行复杂算法,但是外设驱动能力较弱,同时完成系统控制和信号采集与处理将大大削弱其运算能力。FPGA外设资源丰富,但不具备浮点运算能力,较难运行复杂算法。MCU同样具有丰富外设,但是运算能力弱,无法实现复杂算法。
针对LFMCW雷达的研究现状,本文提出了一种MCU+DSP双核构架的方案,充分利用MCU外设丰富、DSP浮点运算能力强的特点,设计了雷达信号处理系统,解决精度较高、运算量较大的信号处理算法难以在线实验的问题;并在详细设计了雷达系统硬件电路的基础上,采用目前测距精度较高的算法进行了测距实验验证。
1 LFMCW雷达测距原理及系统方案
1.1 LFMCW雷达测距原理
在调制信号为三角波的情况下,LFMCW雷达发射信号、回波信号时频图如图1所示。

图1 发射信号、回波信号时频图
图1中B为调频带宽,T为调频周期,τ为发射信号与回波信号的时延,f0为差频信号频率。由图1中的三角关系可得[5]:
由雷达原理可知:
其中R为测量距离,c为电磁波速度。将式(2)代入式(1),得到雷达测距公式:
由式(3)可知,只要得到差频信号频率,就可以计算出雷达测量的距离。
1.2 LFMCW雷达信号处理系统方案
设计采用MCU+DSP双核架构,系统方案如图2所示。以单片机信号采集核心,以DSP为信号处理核心。单片机实现调制信号生成、差频信号调理与采集等功能;DSP实现测距算法、串口通信等功能。单片机与DSP之间采用高速SPI通信。

图2 LFMCW雷达系统方案
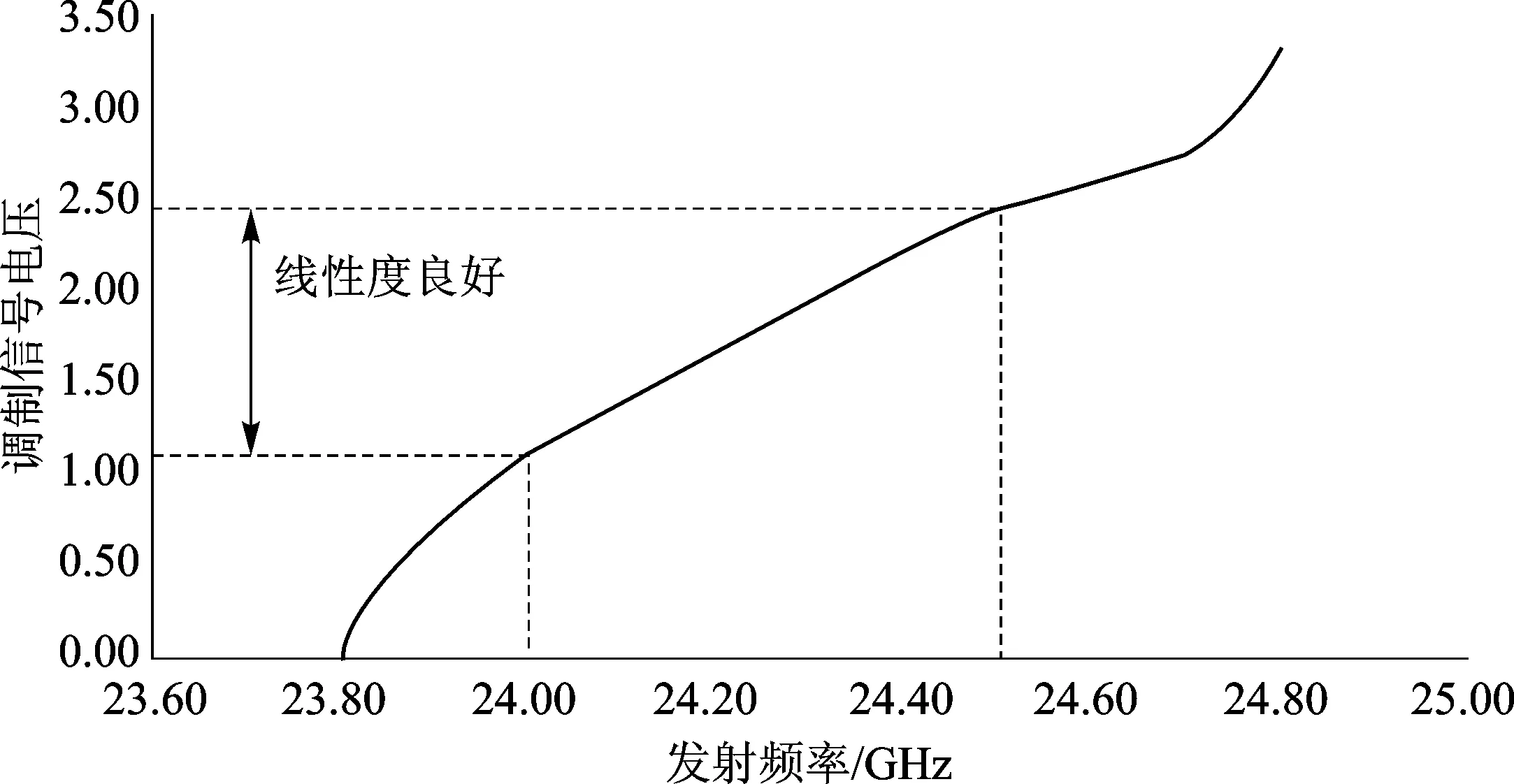
图3 调制信号电压与发射频率曲线
射频前端部分采用国产某新型高性能24 GHz LFMCW雷达传感器,其VCO调制信号电压与发射频率曲线由图3所示。当调制信号电压在1.20~2.46 V之间时,发射信号线性度较好,发射频率为24.040~24.505 GHz,调频带宽B为465 MHz。
MCU选用C8051F120,片内集成了两个12位的DAC,最高输出频率50 kHz,可以使用相位累加算法,通过自定义函数表产生任意高精度的周期信号。同时C8051F120还集成了12位ADC,转换速率可编程控制,最大可达到100 ksps。
DSP选用TMS320F28335,其主频为150 MHz,具有浮点处理单元,片内RAM为34K×16bit,片内Flash为256K×16bit,能够满足测距算法浮点计算的需要。
2 系统设计
2.1 调制信号产生模块
雷达前端压控振荡器(VCO)一般具有非线性特性,利用标准三角波作为调制信号输出的连续波频率往往不成线性变化。为了改善VCO输出信号的线性度,需要对雷达前端进行开环校正或闭环校正。工程中普遍采用开环校正,即根据图3所示的调制信号电压与发射频率的关系,采用非线性的调制电压信号驱动雷达传感器,抵消VCO 的非线性影响[6-7]。
设计采用C8051F120片内DAC,运用直接数字频率合成(DDS)的原理,将经过非线性校正的三角波波形数据存储到存储器中,调用生成调制信号。波形产生主要调用三个部分:累加器、定时器和存储器。每次调用定时器时,相位累加器的值增加一个PHASE_ADD,同时在存储器中查表寻找下一个DAC输出值。PHASE_ADD的大小根据下式计算得出:
式中,F为三角波频率,fs是DAC的采样速率。
DDS输出信号的频谱里一般包含理想输出频率、高频干扰和DDS数字杂散,因此需要进行滤波处理[8]。DAC 生成的三角波信号首先经过低通滤波器(LPF),滤除其中的高频干扰,然后利用放大器OP284将信号进放大。放大电路的输出直接作为雷达传感器的调制信号输入,其电路如图4所示。

图4 调制信号滤波电路原理图
2.2 信号采集模块
由雷达方程可知,LFMCW雷达测量的距离与差频信号的功率成四次方的关系,当测量距离较远时,有用信号往往被淹没在噪声信号之中[9]。此外,差频信号中还有固定频率的三角波调幅信号干扰,直接进行频率估计误判几率较高[10],因此采集信号前需要进行滤波处理。
设计理论测距范围R为1~10 m,调制信号带宽B=465 MHz,扫频周期T=4 ms,由式(3)计算可知,差频信号最低频率为fBS(min)=1.55 kHz,最高频率为fBS(max)=15.50 kHz。设计采用双运放NE5532,搭建二阶巴特沃斯有源低通滤波器和高通滤波器,然后通过低通滤波器与高通滤波器级联,构成带通滤波器。电路原理图如图5所示。
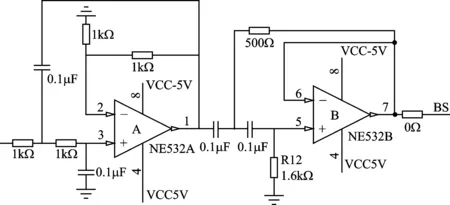
图5 差频信号滤波电路原理图
图5所示带通滤波器通带范围为1.55~15.5 kHz,放大倍数为一倍,二倍频衰减24 dB,满足差频信号滤波需求。
按照奈奎斯特采样定理,ADC采样率至少需大于差频信号最高频率的2倍,本设计取5倍进行采样,故采样率 fADC= 15.5 kHz × 5 = 77.5 kHz,因此ADC采样率大于 77.5 ksps即可满足需求。
ADC 转换位数一般选择 12 位即可。参考电压采用内置参考电压。综合考虑系统需求和成本,选择单片机内置 ADC即可满足系统需要。同时,采用内置ADC模块在不占用CPU运行周期的情况下将数字信号存储到单片机内置的存储器中。与目前一般的差频信号采集系统采用外置的ADC以及外加FPGA实现FIFO的方案相比,本设计结构简单、成本较低、可靠性更高。
2.3 SPI通信模块
为了满足实时性好的需求,MCU采集到的差频信号数据需要以一种高效的方式传送至DSP。串行外设接口(SPI)通信占用接口少,通信速度快,且C8051F120与TMS320F28335都支持,是一种理想的方案。
SPI通信在硬件上分为主机和从机。只需要连接主机的发送与从机的接收,主机的接收与从机的发送,主机的时钟、使能与从机的时钟、使能4根线。本设计将MCU作为串行通信的主机,DSP作为从机,其硬件连接如图6所示。

图6 MCU与DSP的接口连接图
在从机选择线SPISIEA使能的情况下,主机和从机的SPI时钟线相连后,主机与从机的串行通信就不需要有起始位、停止位等用于同步的格式位,直接将采集的数据写入主机的SPI发送数据寄存器即可实现数据的发送。当从机接收完一段完整的信号后,设置中断标志位停止接收数据,同时将移位寄存器接收到的内容复制到从机的SPI接收数据寄存器SPIRXBUF中,完成单片机到DSP的通信。
2.4 串口通信模块
C8051F120具有可同时使用的两个UART串行端口,支持单片机和其他使用标准不归零格式(nRZ)的异步外围设备间的通信。由于上位机串口多采用基于RS-232的DB9接头,因此本设计通过UART连接MAX3232,实现TTL电平到RS-232电平的转换。只需要连接发送信号线、接收信号线和地线即可实现全双工通信,硬件电路如图7所示。
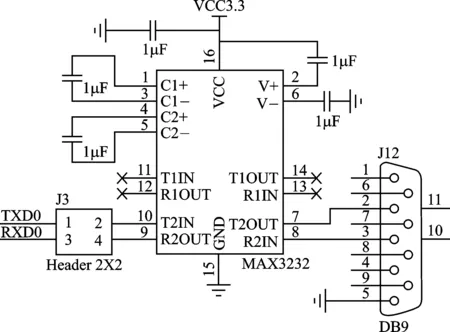
图7 RS-232转换电路
2.5 信号处理模块
DSP中的信号处理采用基于相频匹配的频率估计算法[2]。该方法误差接近克拉美罗下限(Cramer Rao Lower Bound,CRLB),是目前LFMCW雷达测距精度最高的算法之一。相频匹配方法测距原理为:利用一种计算量小的算法对频率进行粗估计,然后利用频率粗估计值构造参考信号,得到参考信号与自定义自相关信号的相关系数,根据柯西不等式建立误差函数,误差函数取得最小时所对应的频率即为估计频率。相频匹配方法的实现步骤如下:
① 利用式(5)构建待测信号的自相关信号λ(k),其中k=1,2,…,q且q≤(N-1)/2,由于λ(k)为自相关信号,所以具有零初相位。
② 由谐波分解法(PHD) 计算λ(k)角频率估计值ω1。
③ 根据角频率估计值ω1构建两路正弦信号cos(kω1)和sin(kω1)。
④ λ(k)、cos(kω1)和sin(kω1)通过式(6)进行相频匹配,得到信号角频率精确值ω。

(6)
⑤ 根据角频率精确值ω和采样频率fs,由式(7)计算信号频率:
2.6 系统软件设计
系统开始工作时,首先进行初始化,如系统初始化控制、接口初始化和中断设置等。然后系统等待中断程序。在中断程序中,MCU完成调制信号生成和数据采集,DSP实现信号处理。在中断程序中每512个数据进行一次数据采集与处理,然后调用信号处理算法函数处理数据,得到距离信息。最后将距离信息通过串口发送至上位机。程序流程如图8所示。

图8 程序流程图
3 实验验证与分析
为了验证设计的LFMCW雷达信号处理系统的有效性,本文对静止目标进行了测距实验。实验参数设置为:调制信号为三角波信号,电压为1.20~2.46 V,频率为250 Hz,调频带宽465 MHz。采集得到的差频信号波形如图9所示。可以看出,系统各功能模块工作正常,硬件设计及软件设计正确,差频信号较为稳定。
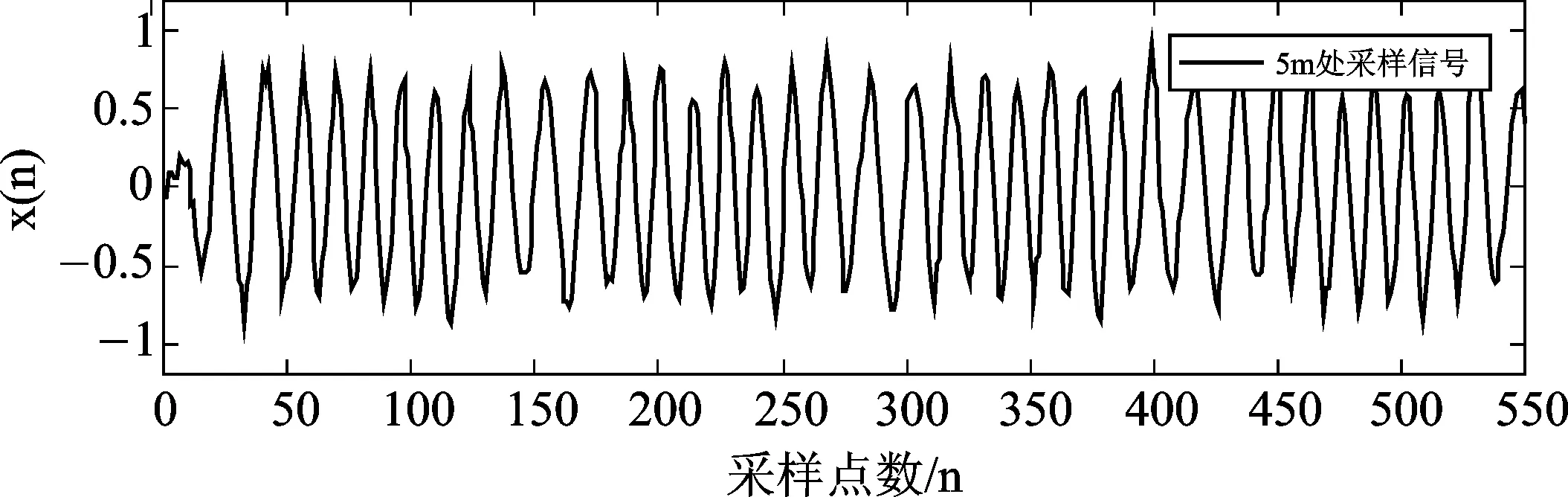
图9 差频信号波形图
表1为1~9 m静止目标的测距实验结果,测量的绝对误差在100 mm以内,可以满足一般使用场景应用。此外,多次实验表明1 m处由于接近雷达最小测量距离,会导致误差忽然增大,在实际使用中需注意雷达最小测量距离。
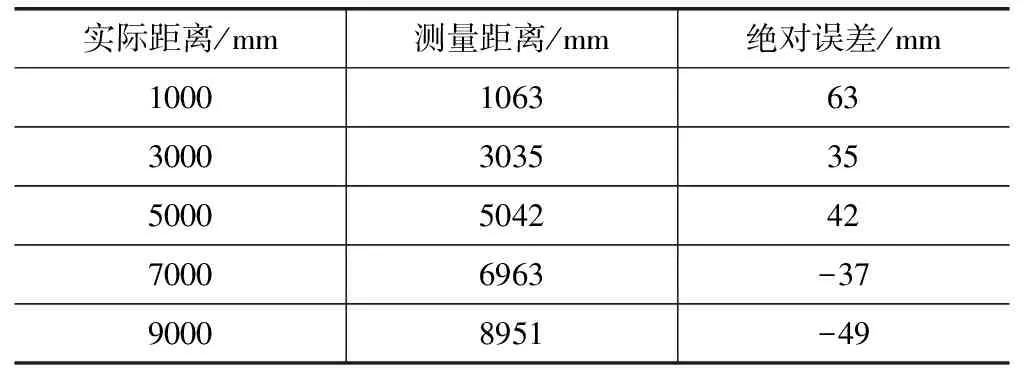
表1 实验结果
结 语

[1] Lin J J, Li Y P, Hsu W C, et al. Design of an FMCW radar baseband signal processing system for automotive application[J]. SpringerPlus, 2016,5(1):1-16.
[2] 沈艳林, 涂亚庆, 刘鹏, 等. 非整周期采样信号频率估计的相频匹配方法[J]. 仪器仪表学报, 2015,36(6):1221-1226.
[3] Su D, Tu Y, Luo J, et al. A frequency estimation algorithm based on cross information fusion[J]. Measurement Science & Technology, 2015,26(1):217-238.
[4] 赵晓月, 何书睿, 陈先中, 等. 强干扰环境下高炉雷达信号机器学习算法[J]. 控制理论与应用, 2016,33(12):1667-1673.
[5] 丁鹭飞, 耿富录, 陈建春. 雷达原理[M].5版.北京:电子工业出版社, 2014.
[6] 涂亚庆, 杨辉跃, 张海涛, 等. 复杂信号频率估计方法及应用[M]. 北京:国防工业出版社, 2016.
[7] 齐艳丽, 赖涛, 赵拥军, 等. 一种FMCW信号非线性校正方法[J]. 信息工程大学学报, 2016(2):150-154.
[8] 陈林军, 涂亚庆, 刘鹏, 等. 基于FPGA的LFMCW测距雷达调制信号源设计[J]. 电子设计工程, 2016(1):115-117.
[9] 张鉴, 戚昊琛, 高伟清, 等. 汽车主动防撞系统的中频信号处理模块[J]. 电子器件, 2015(5):1114-1119.
[10] 蔡潇, 陈敬军. 高灵敏度大动态范围船用导航雷达对数中频放大器设计[J]. 雷达与对抗, 2016(1):56-59.
王斯盾(硕士研究生),主要研究方向为智能检测与智能控制。

[7] 石炜,李俊成,蔡春明,等.视觉检测与激光精密测量在轴承加工检测中的应用[J].机床与液压,2014(22):150-153,157.
[8] Xie L,Yang L,Yong H E.Machine vision application in precision mould breakage detection system[J].Manufacturing Automation,2013(3):515-531.
[9] 何京徽,许素安,谢敏,等.基于LabVIEW的激光双频外差干涉纳米位移测量系统[J].测控技术,2014,33(5):31-34.
[10] 王富平,水鹏朗.形状自适应各向异性微分滤波器边缘检测算法[J].系统工程与电子技术,2016,38(12):2876-2883.
[11] Zhang J,Lian Y,Dong L,et al.A new method of fuzzy edge detection based on Gauss function[C]//The International Conference on Computer and Automation Engineering,2010:559-562.
[12] 张铖伟,王彪,徐贵力,等.摄像机标定方法研究[J].计算机技术与发展,2010,20(11):174-179,183.
[13] 赵杰,王龙,龚硕然,等.基于折射定律的摄像机标定模型[J].计算机仿真,2014,31(9):262-266.
LFMCWRadarSignalProcessingSystemBasedonMCU+DSP
WangSidun,LiuPeng
(Department of Military Logistics,Army Logistical University,Chongqing 401311,China)
In the paper,a scheme of LFMCW radar signal processing system based on C8051F120+TMS320F28335 is proposed.C8051F120 is used as the signal acquisition core,it generates the modulation voltage signal,then drives the radar sensor to generate the beat signal,and carries on the beat signal conditioning and gathering.TMS320F28335 is used as the signal processing core,and the frequency estimation algorithm based on phase-frequency matching is embedded to process the beat signal to get the measurement.The online experiment results show that the functional modules work properly and the phase-frequency matching algorithm gains high precision.
LFMCW radar;signal processing;C8051F120;TMS320F28335
国家级-频率估计的多段信号频谱融合法及应用基础(61271449;61302175)。
TP274
A
杨迪娜
2017-09-26)
2017-08-31)