电磁驱动机器鱼的设计优化
2018-01-03花如祥徐小力吴国新朱红秀
花如祥,徐小力,吴国新,朱红秀
(北京信息科技大学现代测控技术教育部重点实验室,北京 100192)
电磁驱动机器鱼的设计优化
花如祥,徐小力,吴国新,朱红秀
(北京信息科技大学现代测控技术教育部重点实验室,北京 100192)
仿生机器鱼有运动效率高、机动性好等特点,逐渐成为了仿生机器人领域的研究热点。传统机器鱼的驱动方式主要有电机驱动、液压驱动、气压驱动等,体积较大、材料容易磨损,难以用来设计微型机器鱼。采用新型动力源,结构简单,容易实现,噪声、振动和机械损耗都比较小。基于此驱动方式设计出机器鱼采用6个关节来运动,优化了机器鱼运动的流利程度和多样性。
仿生机器鱼;电磁驱动;外形和内部结构设计;关节链接
10.16621/j.cnki.issn1001-0599.2017.12.48
0 引言
鱼类特殊的游动方式,为研究高性能的水下推进器提供了新思路。工业设备和军事等领域的需求推动了仿生机器学研究。目前,仿生机器鱼已成为仿生科研领域的一个研究热点。其中,仿鲹科加新月形尾鳍推进模式的机器鱼,由于具备能源利用率高、推进速度快等特点,成为研究重点[1]。
仿生机器鱼水下推进技术对海洋考察、救生以及军事领域具有很高的应用价值和巨大的应用前景。在海洋设备检测方面,仿生机器鱼可以用于水下进行设备的检测。效率高,且成本较低。在军事方面,可以应用在隐蔽性较强的场合。由于仿生机器鱼在声纳上的表现形式和生物鱼类几乎相同,并且具有噪声低,对环境扰动小的特点,这极利于隐蔽。
机器鱼设计是一项复杂而企且技巧性较强的工作,鱼体的外形参数的不同,关节链接的方法不一,会使仿真效率存在着很大区别。采用电磁驱动方式可使机器鱼整体机构简单。鱼体采用6个关节,各个关节的链接方式的优化提高了控制运动的多样性,使之能满足在水中高效率的推进运动。
1 机器鱼体运动的受力分析
目前国内外已经建立的机器鱼多种多样,本文选取关节机器鱼进行研究,其中最简单的2关节机器鱼结构由鱼体、尾柄、尾鳍和胸鳍组成(图1)。通过尾柄和尾鳍的摆动击水产生向前的推进力。2关节机器鱼是多关节机器鱼的最简形式,其分析理论具有普遍意义。为了简化动力学分析,对2关节机器鱼作4点假设。
(1)鱼体、尾柄、尾鳍具有足够的刚度,在惯性力和水作用力下发生的变形很小,可以忽略不计;
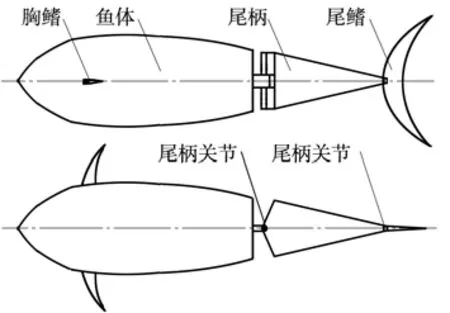
图1 2关节机器鱼结构示意
(2)不考虑尾柄、尾鳍摆动引起的机器鱼的重心和浮力作用点的变化;
(3)机器鱼处于无限大、无流动的水域当中;
(4)机器鱼潜水深度不变,且无侧倾和俯仰运动。
阻碍机器鱼运动的力主要有摩擦阻力、形体阻力和涡流损耗。相比于形体阻力,摩擦阻力和形体损耗很小,可以忽略不计。根据莱特希尔细长体理论,见式(1)。

式中 ρ——流体的密度,kg/m3
v———物体的速度,m/s
S———横截面面积,m2
CD——鱼体中间最大的横截面积,m2CD可由式(2)计算得到。

式中 a——鱼体最大横截面积的长轴长度,m
b——鱼体最大横截面积的短轴长度,m
S可由式(3)计算得到。

式中 an——鱼体第n段的长轴长度,m
bn——鱼体第n段的短轴长度,m
由上式计算可得,S 为 25.2 cm2,f为 1.512v2。
机器鱼的质量主要有:尾鳍的质量已知为0.45 g;电池的质量,选择锂—二氧化锰中的CR1225电池,且需要 2节串联,即1.80 g。
机器鱼受到的驱动力如图所示。
由图2和资料可以计算出最大力矩Tmax。

图2 驱动力简图

式中 f——鱼体所受的阻力,N
r——所取截面距离鱼体和尾鳍连接面的距离,m
A——鱼体在所取截面中心所受阻力与x轴的夹角,°
f与力矩的关系为(5)式。

式中 l——鱼体的总长,m
由式(5)可以得出,f=9.47×10-3N。
由驱动力和阻力的计算可以进行运动的理论分析:①v=0.01 m/s时,f=1.512×10-4N<fmax,鱼可以游动。②v=0.02 m/s时,f=6.048×10-4N<fmax,鱼可以游动。③v=0.05 m/s时,f=3.780×10-3N≥fmax,鱼不能游动。可得出,鱼体在0.02~0.05 m/s时可以游动。
2 机器鱼外形和内部结构的设计
选取真实的鲹科鱼——蓝圆鲹的形体参数作为初始仿真参数,主要原因:①蓝圆鲹数量巨大,生存能力强,在自然进化过程当中,鱼体外形和游动规律相比于其他鱼类更的优越性;②身体横截面呈椭圆型,在仿真过程当中能减少运算量、提高仿真精度。
选取一条真实的鲹科鱼类,测量其总长并拟合鱼体外形曲线,可得l为260mm。鱼体纵向曲线函数R(x),鱼体横向曲线函数(rx),分别见式(6)和式(7)。

在机器鱼关节数量的选取上,关节数越多,游动曲线与已知的鱼体波方程贴合度越高,鱼体柔性越大,越接近于真实鱼类的游动。但也应考虑串联结构的累积误差和尺寸约束,n并非越大越好。通常机器鱼关节数n取值区间为2~10。本文中所设计的机器鱼关节数取n=6,使柔性和误差积累最优化。
2.1 机器鱼整体外形设计
在各关节长度的设计上,由于鱼体的摆动主要集中在鱼体体长的后1/2,因此可视为鱼体前130不作摆动。又根据实际测量可知鱼尾长为47mm,根据柴志坤[7]提出的关节尺寸参数优化设计方法,其余 5关节比例应为83:67:59:53:48。计算取整后各个关节的长度:关节1长22mm;关节2长18mm;关节3长16mm;关节4长14mm;关节5长13;关节6长47mm。
根据上面的测量数据,得到机器鱼躯干的14组数据,每组高4,自头部至尾鳍连接处的椭圆长轴长和短轴长分别为:(0,0),(12,7.2),(17,10.2),(20,12.0),(21,12.6),(22,13.2),(22,13.2),(21,12.6),(20,12.0),(19,11.4),(18,10.8),(17,10.2),(15,9.0),(10,6.0)。单位为mm。
在UG中先根据上面得出来的14组数据绘制曲线,然后利用样条曲线和通过曲线网格构建曲面的出鱼体外壳的三维视图(图3)。
2.2 机器鱼各部分设计
电磁驱动的原理:有电流流过时,在导线的外部就会产生磁场,根据“右手螺旋法则”,如果大拇指指向电流流动方向,那么其他四根手指的指向就是磁场方向。将这个导线缠绕在纸管(非铁磁材料管)上,载流导线产生的磁场就会叠加,再根据右手螺旋法则,如果四根手指指向电流流动方向,那么大拇指的指向就是磁场的磁力线方向,规定磁力线的流出方向为N(磁北极),流入方向为S(磁南极)。铁磁材料在磁场中会受到磁场作用,所以把永久磁铁镶嵌在鱼体内表面上,当线圈通电时就会产生磁场,与永久磁铁产生力的作用,使机器鱼的各个关节运动,当控制线圈的电流大小和方向,就会使关节产生不同的运动。
基于上述的转动方法,本文设计出电磁驱动装置结构(图4)。图4中定轴是与机器鱼上下内壁相连,叉子围绕定轴可左右摆动,而上下对称的限制结构是用来限制叉子只可左右摆动,不可上下运动。左右对称的鱼壁是抽象用来表示鱼体的内壁,左右对称的磁铁是指用来镶嵌在鱼体内壁上的永久磁铁。线圈缠绕在叉子上(图5)。当线圈通电时,叉子产生磁场。如果此时产生的磁场相当于磁铁的S极,则会与内壁上一边的N极相吸,带着叉子向N极摆动,周期性改变电流的方向即可使鱼体左右摆动。控制电流改变的频率即可控制鱼尾摆动的频率,而电流的频率可以用单片机控制。
分析认为,鱼体之所以能够前进,是由于脊椎曲线带动它所包络的流体向后喷出,产生推力。鲹科鱼类在游动过程中通过尾鳍摆动产生90%以上的推进力。因此,尾部运动是研究机器鱼的一个关键。尾部运动可以看作平动和摆动的合成。
根据目前所公开的研究成果[8],可用4个参数为主要设计参考。
(1)尾鳍最大击水角度 δmax,15°<δmax<25°;
(2)尾鳍摆动—平动相位差 φ,φ=90°;
(3)尾鳍摆动轴平动运动幅值 H,H=(0.075~0.100)l;
(4)尾鳍摆动后缘最大 摆 幅 ATmax,ATmax≈0.100lB。
根据以上数据和前面提到的尾部长度47mm,在UG软件中,用鱼体的外形进行修剪,从X轴的213mm截到260mm,则得出鱼尾部分,然后对其进行抽壳,壳体厚度设为15mm。

图3 机器鱼三维图
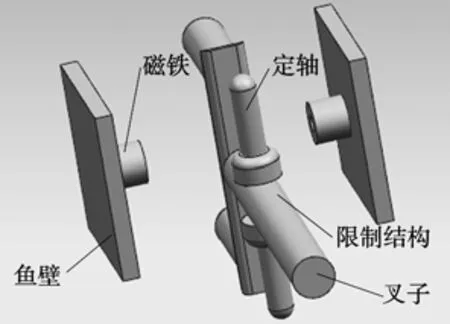
图4 电磁驱动简图

图5 叉子的三维简图
因为需满足后文的链接要求,所以把链接的叉子部分与鱼尾设计到一起去,使结构简化和满足链接要求。UG简图如图6所示。
通过计算控制结构1的长度和鱼尾部所链接的上一关节部分的内部大小,使其满足上述的各项参数。
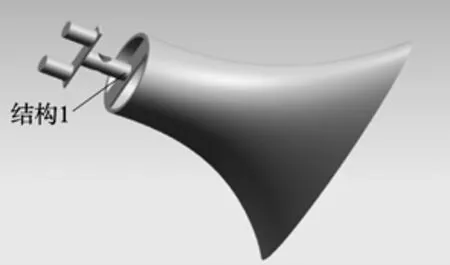
图6 鱼体尾部三维简图
对于鱼体的其他部分,第一段是0~130mm鱼头部分,用于放置电路板和胸鳍。
图7前面是所加入的舵机,用于控制胸鳍的运动,图8中的2个十字架形状结构用于粘贴电路板,因为总共需要在鱼体内部安装4块电路板,2个十字架形状结构有4个面,用于一个面粘贴一个电路板。在130mm的尾部也需要放置一个电磁驱动系统装置,用于控制下一段的运动。鱼头部分的三维简图如图9所示。
因为是6个关节的机器鱼,所以除了鱼头和鱼尾的部分,剩下还有鱼体的中间5个部分。这5个部分结构相同,尺寸不同,各个部分的具体尺寸需根据具体的位置计算得出。
如图10所示,前面叉子的部分就是图2所示的结构,和鱼壁相连。此部分的结构1和上一部分的后面结构2相链接,构成鱼体的各个部分的链接机构。装配链接后形如图4。此链接方式简单有效,很好的贴合电磁驱动的运动方式。各个部分的链接强度和刚度也能满足要求。较传统的链接方式更容易实现,减小了操作的难度。在各个部分的左面壁上,留有2个直径为5mm的孔洞,可用于在最后总体安装时候,留给线路板上的线与各个部分的电磁驱动装置连接。
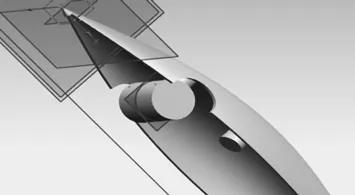
图7 胸鳍部分三维简图

图8 电路板的放置简图

图9 鱼头部分三维简图
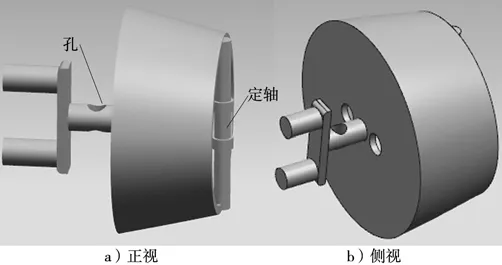
图10 鱼体中间一部分的三维简图
当各个关节部分设计完成后,利用UG进行各个部分的装配(图11)。
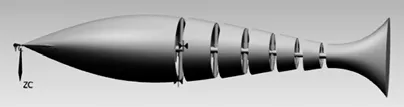
图11 6关节机器鱼总体装配三维简图
3 结语
仿生机器鱼相比于一般的AUV(水下自主航行器),具有机动性好、运动效率高、利于隐身和无污染等优势,其在目前和将来,在海洋探测、海洋设备的检测和军事等领域将有巨大的应用前景。
基于鲹科月牙形尾鳍推进装置的微型仿生机器鱼的研究,通过初始参数的选择与计算,得出了模拟仿真的参数,为数字化仿真打下了基础。通过利用新型动力源,采用不同的链接方式,增加了可操作性。并且优化了各个部分结构设计,为今后的设计提供了基础和建议。
[1]谢超平.仿生机器鱼路径规划研究[D].柳州:广西工学院,2010.
[2]王磊,王卫兵,刘巧.仿生机器鱼胸鳍的三维设计及数控加工[J].石河子大学学报(自然科学报),2009.
[3]刘英想.两关节机器鱼本体及动力学研究[D].哈尔滨:哈尔滨工业大学,2007.
[4]李晓冬.仿生机器鱼研究进展分析[J].黑龙江科技信息,2008(9):23-24.
[5]郝栋伟,王文全.某型仿生鱼自主直线巡游速度的影响因素研究[J].应用数学和力学,2014,35(6):674-683.
[6]陈宏.仿生机器鱼巡游和机动的运动机理研究[D].合肥:中国科学技术大学,2006.
[7]柴志坤.机器鱼柔性脊骨的仿真和实验研究[D].哈尔滨:哈尔滨工业大学,2008.
[8]韩路辉,陈维山,刘军考,夏丹.基于FLUENT的摆动尾鳍水动力特性研究[J].机械设计与制造,2010(5):204-206.
TH12
B
〔编辑 吴建卿〕
国家高技术研究发展计划(2015AA043702),国家自然科学基金资助项目51275052。
