铁路大型养路机械特种视频监控系统研究
2018-01-03翟仕乐
翟仕乐
(中国神华轨道机械化维护分公司肃宁工务机械段,河北沧州 062350)
铁路大型养路机械特种视频监控系统研究
翟仕乐
(中国神华轨道机械化维护分公司肃宁工务机械段,河北沧州 062350)
大型养路机械是现代铁路维护的重要设备,目前在我国铁路线路维修中得到广泛应用,为进一步提升大型养路机械工作的质量和效率,研究开发在大型养路机械上安装监控系统,随时掌握机械车周围动态情况,更有利于安全生产。根据作业施工现场实际情况,分析了监控系统具有的功能和特点,并在此基础上设计了现场操作子系统和数据中心子系统,进行了实验室试验和工况试验,试验表明所开发的系统实时性好,图像清晰,具有较好的适应恶劣工作环境的能力。
铁路养路机械;特种监控系统;现场子系统
10.16621/j.cnki.issn1001-0599.2017.10.52
0 绪论
随着铁路行业的蓬勃发展,铁路线路维护与质量保障显得尤为重要。引入大型养路机械极大地减小了养路工人的劳动强度,铁路线路的维护自动化程度越来越高并日渐规范。但是大型养路机作业现场条件恶劣,作业中工作装置振动大、噪声高,车内操作工与车外指挥和质量监视人员沟通不方便。为了保障大型养路机械施工质量,操作人员需要对大型养路机械工作装置进行实时监控。为此,设计了特种监控系统,用于实时监测各工位工况。同时,为提高对大型养路机械的管理水平,建立了远程监控数据中心,数据中心可以调出工作现场的图像。
神维公司的大型养路机械设备主要有清筛机、捣固车、稳定车、配碴车等。捣固车是公司大型养路机械中的重要车型之一,用于神华铁路线路的维修,对铁路轨道进行起、拨道和抄平作业,使铁路轨道的方向、水平以及前后高低,全部达到线路要求的维修标准。捣固车的运用提高了道床石碴的密实性,增加了轨道的稳定性,确保列车安全运行。捣固车在公司大型养路机械设备中数量最多、使用率最高。因此,首先在捣固车上安装了视频监控系统。本文以大型养路机械中的捣固车为例,表述相关研究成果。
1 特种监控系统框架
安装在捣固车上的特种视频监控系统,分为现场操作监控子系统与数据中心子系统两部分,现场操作监控子系统用于监测记录各工作装置工况情况,数据中心子系统用于调控现场工况的实时数据流。采用了6组红外摄像机监测捣固车左捣固头、右捣固头、左夹钳、右夹钳、前端、后端等位置,在作业操作位置,前、后端司机室均可实时查看,即在子系统实现了多路监控。各子系统把视频主机的信息及采集到的视频流数据,经数据调制形成统一数据格式,经4G网络传输至数据中心。数据中心将数据解调成一般数据供计算机使用,计算机具有添加注册、注销各子系统ID、读取、记录、视频等功能。特种监控系统框架如图1所示。
2 现场操作子系统
2.1 现场操作子系统功能与性能要求
在大型养路机械上安装图像监控系统,大型养路机械的操作人员作业中能随时看到车辆周围的状况,在施工过程中能在确保施工安全的前提下,提高大型养路机械的使用效率和作业质量。由于大型养路机械施工作业环境非常差,所以对大型养路机械监控系统适应环境的能力提出了更高要求。现场组成操作子系统的所有元件应具有6方面性能。

图1 图像监控系统框架
(1)系统可适应的环境温度在-25~55℃,且具有较好的抗振性能。
(2)具备夜视功能,密封性能要好,具有防雨雪、防尘功能。
(3)系统工作电压范围广,在6~36 V。
(4)在司机室和1#位能实时看到大型养路机前后、左右工作装置的状态,图像要清晰。
(5)要求各位置的图像能单独显示,也可以分割显示,两种状态可以相互切换。
(6)系统具备大容量存储图像的功能。
2.2 现场操作子系统组成
现场操作子系统,主要功能是实现对大型养路机上的6路视频监控图像的实时采集,并通过网络与后续的控制平台进行高速数据流传输,保证系统对视频数据的实时性要求。具体内容:6路CCD摄像机将采集到的视频模拟信号传输给视频采集电路,把色彩及明暗的光信号转变成模拟的电信号,通过模数转换变成符合标准的数字信号并传送给数字信号处理器(DSP)。处理器中的数字信号,通过视频编码电路,经过数模转换,再把数字信号转换成模拟信号,传输到显示器端,完成对现场的实时观察。同时实现DSP对视频数据的本地保存,网络与后续控制计算机进行通信,计算机软件进行切换回放操作。系统硬件的结构如图2所示,

图2 系统硬件结构
2.3 现场子系统主要硬件选型
2.2.1 电源模块
大型养路机械的电源系统是+24 V,由于机械车启动时电源电压会被拉低,系统电池浮充时,电源电压保持接近28 V。为避免系统由于供电浮动而产生的故障,采用9~36 V转12 V电源模块。电源模块具有5个特征。
(1)高功率密度,超薄设计,超小体积。
(2)多重保护功能设计,采用基板工艺生产,加强了产品可靠性。
(3)加强电磁兼容设计,可在强电磁环境下工作,具有低EMC特性,已通过欧盟CE认证。
(4)一体化灌封,实现了防腐、防潮、防震性能。
(5)具有输入过压、欠压、输出过压、过流、短路保护。
2.2.2 数字信号处理器(DSP)选型
运算速度是评价DSP性能最重要的指标之一,运算速度越快说明DSP处理数据的能力越强,是首选参数。同时,还要考虑芯片的其他硬件资源能否满足现场的实际需要,比如:内存RAM和ROM存储的大小,I/O接口的匹配等。另一方面,选择DSP型号的芯片,还需要考虑开发工具的完善,不只需要提供软件开发工具,还应有与之相适应的硬件。当设计DSP系统时,系统越是复杂开发工具越重要。没有好的开发工具支撑,会增加系统开发的难度,更难提高系统的扩展性和可移植性。根据现场实际情况,综合各方面考虑比较,最后选择了TI公司生产的TMS320DM642芯片(简称DM642)。该芯片的工作频率,是由芯片内部的PLL锁相环进行设置的,设定的频率可达到500 MHz,600 MHz,720 MHz,相应的每秒可执行的指令数是4000 MIPS,4800 MIPS和5760 MIPS。在多媒体数字信号的处理中,得到最广泛的应用,是DSP系列产品中性价比较高、数字媒体解决方案的首选产品。该芯片除拥有高速控制器的操作灵活性,还具有阵列处理器的数字处理能力且芯片的外围,设有完整的音频、视频和网络通信接口。
主要参数:具有3个可配置的视频端口(VPORT0-2),可以实现与通用的视频编、解码器无缝连接,并支持多种视频分辨率和视频标准,支持RAW视频输入/输出,传输流模式。有1个10/100 Mb/s以太网接口(EMAC),符合IEEE 802.3标准。1个多通道具有缓冲音频串行端口(McASP),支持 I2S,DIT,S/PDIF,IEC60958-1,AES-3,CP-430等音频格式。2个多通道带有缓冲串行端口(McBSP),并采用RS232电平驱动。1个VCXO内插控制单元(VIC),支持音/视频同步。1个 32位、66 MHz,3.3 V 主/从PCI接口,执行PCI2.2规范。1个用户可配置的16/32主机接口(HPI)。1个 16位通用输入/输出端口(GPIO)。1个 64位外部存储器接口(EMIF),能够与大多数异步存储器(SRAM,EPROM)及同步存储器如(SDRAM,SBSRAM,ZBT SRAM,FIFO)无缝连接,最大可寻址外部存储器空间为1024 MB。1个具有64路独立通道的增强型直接内存访问控制器(EDMA)。1个数据管理输入/输出模块(MDIO)。1个I2C总线模块。3个32位通用定时器。1个符合IEEE 1149.1标准的JTAG接口及子板接口等。
2.2.3 模块FPGA的选型
首先根据系统的需求,对现场可编程门阵列FPGA(Field-Programmable Gate Array),模块的工作频率以及资源等多个方面,综合考虑选择相匹配的器件型号。要兼顾接口标准以及开发工具的支持情况。
经过充分的市场调研,赛灵思在FPGA技术方面优势明显,产品类型多,而且技术支持全面。最终选择赛灵思公司的产品XC3S500E-4FGG320C芯片,芯片特点:实现90 nm工艺,320脚FBGA封装,20个乘法器,10476个等效逻辑单元,4个时钟管理模块,可支持232个用户I/O端口,模块性能和资源能够满足现场设计的需求。
2.2.4 摄像机选型
摄像机是现场监测子系统的视频原件,关系到系统抗振性能、画面清晰度、可靠度、稳定性。因此选择了符合系统的彩色红外防水半球防爆摄像机。具体参数:采用高性能SONY CCD,分辨率700 TVL,图像清晰、细腻。低照度,0.001 Lux(F1.2,AGC ON),支持自动彩转黑功能,实现昼夜监控。支持数字降噪功能,数字宽动态功能。支持强光逆转功能。防暴等级超过IK10,符合IP66级防水设计,可靠性高。
2.4 现场子系统软件
现场子系统,选用客户/服务器模型。数字主机作为服务器,把摄像头采集到的视频信号进行压缩处理,同时提供网络传输任务,提供相应的视频信号。主机客户端向服务器端发出请求,接收传来的视频信号,并进行相应处理。视频监控系统客户端的用户登录模块、视频预览模块、回放下载模块要独立设置。在现场要达到操作方便、图像清晰稳定。软件流程见图3。
3 数据中心子系统
数据中心子系统是公司内部设立的用于监测现场工作状况的专用区域,管理人员可以根据生产任务,随时抽调施工现场机械车工况,加强安全管理。

图3 现场子系统软件流程
3.1 数据中心组成
数据中心包含广域网数据接收设备、数据解调设备、计算机及软件等,如图4所示。

图4 数据中心设备组成
3.2 数据中心软件
数据中心软件是远程监控的核心部分。计算机将得到的远程数据解调为监控数据与视频流,分别以界面的形式呈现给管理层,更好掌控现场工作。数据中心计算机也兼备存储能力,记录故障时刻,更好的明确故障类型与故障原因。其流程如图5所示。
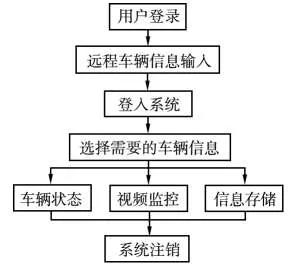
图5 数据中心软件流程
4 大型养路机械特种监控实验
4.1 实验室运行中的检测结果(表1)
4.2 现场作业实况
依据国家规定标准,将所开发的大型养路机械特种监控系统在实验室调整运行正常后,安装在捣固车上进行装车试验、验收。图6为捣固车操作位显示器和数据中心同时检测到的左夹钳实时图像,图像清晰、效果性好,满足现场施工需要。
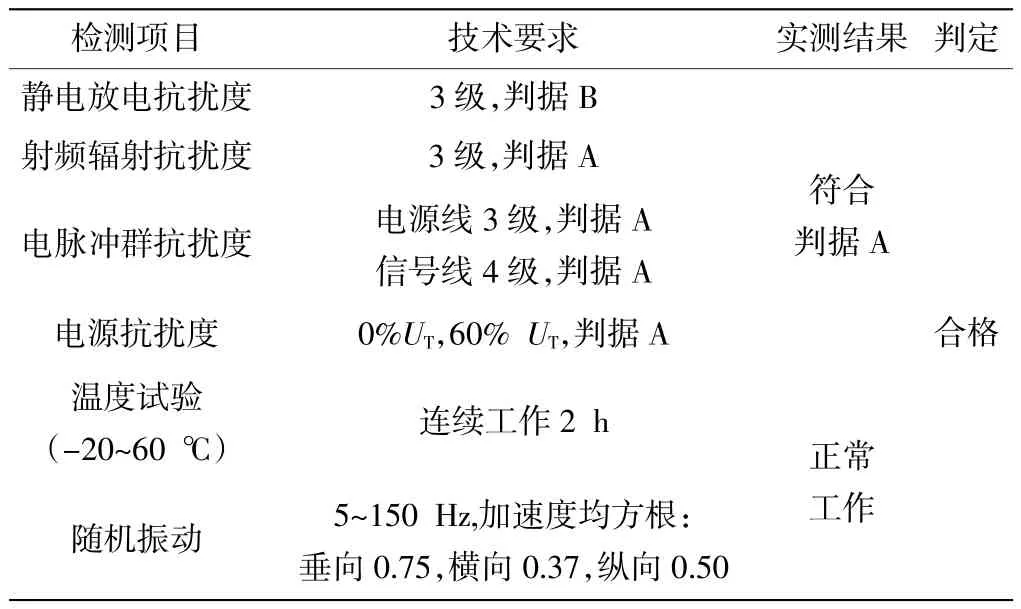
表1 检测结果

图6 现场操作子系统左夹钳
5 结论
大型养路机械的施工现场振动、噪声大,环境恶劣,施工人员在车上、车下沟通不畅,影响施工效率并存在施工安全隐患,为大型养路机械安装特种监控系统十分必要。根据现场实际需求,本文提出了在大型养路机械安装监控系统的必要性和应具有的功能。并根据功能的实现,设计了现场操作子系统、数据中心子系统并分别设计了相应软件。经实验室和现场工况试验:图像清晰、实时性好,操作号位能实时掌控现场情况,工作效率提高,实现了安全生产,达到设计的目标。
[1]杨新军,张文东,胡跃进,等.大型养路机械检修技术基础[M].成都:西南交通大学出版社,2005.
[2]郑群星.Xilinx FPGA数字电路设计[M].北京:科学出版社,2012.
[3]薛小刚,葛毅敏.Xilinx ISE 9.X FPGA/CPLD设计指南[M].北京:人民邮电出版社,2007.
[4]冯琛华.基于DSP的远程视频实时网络传输实现[M].北京:北京邮电大学出版社,2006.
[5]王丹,弓怡龙.探索高清监控的解决方案[J].智能建筑与城市信息,2009(8):90~92.
U216.68
B
〔编辑 利 文〕
