铁道平交道口智能综合交通监控系统设计应用
2018-01-03赵朋轩黄一中
韦 炜 陈 宁 赵朋轩 黄一中
1(西安文理学院 陕西 西安 710065) 2(西安中瑞铁路新技术有限公司 陕西 西安 710065)
铁道平交道口智能综合交通监控系统设计应用
韦 炜1陈 宁1赵朋轩1黄一中2
1(西安文理学院 陕西 西安 710065)2(西安中瑞铁路新技术有限公司 陕西 西安 710065)
针对铁路平交道口缺乏完善的交通综合自动预警监控,设计一套平交道口无人值守交通监控系统。系统下位机是以PLC为控制核心,对道口交通警示标志及设备进行有效控制,并与由组态王构建的上位机监控系统及远程监控计算机建立动态链接,实现本地和远程监控道口状态的功能。实验证明,该系统具有多模式操作、自动化控制、安全稳定性高和维护成本低的特点,能够在减少交通事故发生和提高运输效率方面起到一定作用。
平交道口 交通 监控
0 引 言
在我国,由于铁路列车不断提速,立交道口逐步替代了平交道口,但道路和区域的多样性导致平交道口仍然存在。拥有警示标志的平交道口通常是有人值守,并通过警示栏杆实现防护功能,但道口事故发生率较高,伤亡人员较多。国内现有三万余处道口中,配备警示防护设备的占60%,其余均无任何警示防护装置[1-2]。平交道口对于行人、车辆存在重大安全隐患。
市场上现有铁路道口控制方式主要是人工控制和自动控制。国外自动控制系统已较成熟,例如:日本的MAPLE警报装置可由传感器采集列车接近信号,通过微控制器向行人、车辆发出预警[3];美国的Hxp-3型报警设备具有定时预警、数据记录等特点[4]。国内的道口预警设备总体上存在自动化程度不高,防护预警功能单一,控制系统体积大,操作和维护困难的缺点。
因此,需要研制一种针对平交道口能起到综合防护预警作用的智能监控系统。保证能在列车接近时,对行人及车辆进行警示和防护,排除安全隐患,提高通过效率。
1 控制系统整体方案
根据我国铁路道口预警规则,预警措施需在列车抵达2分钟前完成。因为经过道口的所有火车最高时速为180 km/h,则检测来车的传感器分布在距离道口的S处:S=50 m/s×120 s=6 km。距离检测传感器有14个,对称分布,每间隔1 000 m布置一个,其中的A、B、C、D等4个传感器同时用于道口防护设备控制。如图1所示,当列车驶入6 km检测区域,启动道口防护装置,以确保防护措施能在火车到达道口前2分钟就位。

图1 道口控制要求示意图
该无人值守铁路平交道口自动控制系统由远程监控计算机、本地上位机监控系统和下位机控制系统等三部分组成。其中下位机控制系统包含:压力检测、主控单元、自动栏木、声光报警器和距离显示装置,主控单元采用可编程控制器作为控制核心,对道口交通警示标志及设备进行有效控制;本地上位机监控系统采用组态软件进行前台界面和后台程序设计,并通过网络发布与远程监控计算机建立动态链接,形成本地与远程同时监控的人机交互模式。
该控制系统有三种控制方式,即:自动控制、手动控制和远程控制。自动控制可在无人看守的道口根据火车到来的传感器信号触发防护装置和实现距离显示;手动控制可以对各模块进行测试,及时发现故障并处理,也可在突发状况对防护装置进行手动操作;远程控制可以通过网络对道口状态进行远程实时监控。控制系统组成如图2所示。

图2 控制系统组成框图
2 下位机控制系统
系统下位机被用于有效控制道口防护装置,同时将实时数据传送至上位机。当没有火车通过时,道口绿灯亮,栏木处于抬起状态,行人、车辆正常通行;当压力传感器检测到列车到来时,立即启动声光报警器,并开始放下栏杆,红色信号灯点亮,电子屏显示距离。当压力传感器检测到列车驶离信号时,自动取消报警并升起栏杆,绿色信号灯点亮。
2.1 硬件选型
在可编程控制器的选择上,主要从成本低、功能够等角度考虑,根据该系统的控制要求,所需可编程控制器的I/O点数为输入14点,输出10点,考虑适当的余量,再增加10%~20%的可扩展,最终选用三菱FX2N-48MR-001可编程控制器。
在外部检测防护设备的选型上,主要从稳定性高、应用广等角度考虑,设备型号及特点如表1所示。
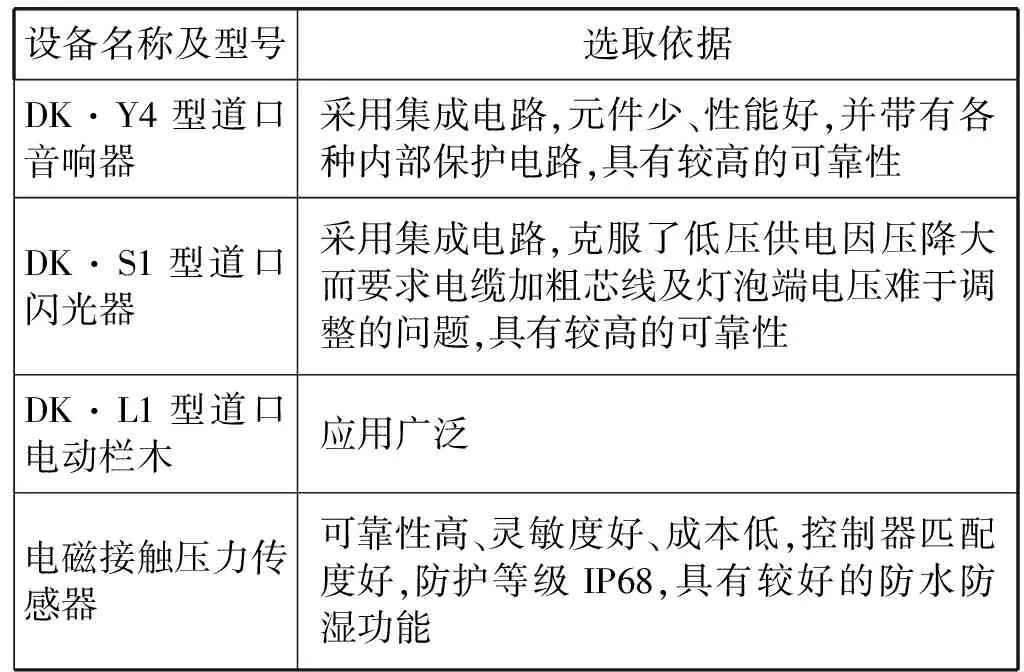
表1 检测防护设备选型表
2.2 可编程控制器I/O分配及硬件接线
该系统的检测和控制的输入输出均为数字量,有14个数字输入点,10个数字输出点,根据系统的功能要求,对可编程控制器的I/O进行相关配置,具体分配如表2所示。

表2 数字输入输出量地址分配表
系统的检测指令元件的一端均接入可编程控制器的相应输入端口,另一端共地,接入COM端。控制执行元件均通过接触器接入可编程控制器的相应输出端口,完成相应的控制报警功能。其硬件接线如图3所示。

图3 可编程控制器硬件接线图
2.3 软件设计
根据控制要求,系统开机,完成参数初始化。当列车未进入道口检测区,道口音响停、道口栏木在最高位、道口闪光灯为绿色信号灯。当列车进入道口检测区时,传感器A检测到来车信号,模拟复位开关X1按下,道口音响响起、道口栏木开始自动下降、道口闪光灯为红色信号灯,电子屏显示6 000 m。在栏木下降过程中,如果还有汽车或行人未通过,检测防卡的传感器E得到信号,栏木停止下降,当汽车或行人彻底离开道口后,栏木继续开始下降,直到触碰到下限位开关后停止,电子屏依次显示距离为5 000 m、4 000 m、3 000 m、2 000 m、1 000 m。当列车通过道口后,电子屏显示距离为0000 m,道口检测传感器C或D得到下降沿触发后,电子屏熄灭,延时5秒后,道口音响停,道口闪光灯由红色变为绿色,道口栏木开始上升,直到上升到上限位开关触发后,栏木停止上升。当列车彻底离开道口检测区域后,标志位置位,检测下一次来车。系统逻辑控制流程如图4所示。

图4 系统逻辑控制流程图
3 上位机监控系统
组态软件是一种面向工业自动化的通用数据采集和监控软件,其提供了丰富的监控功能,不仅可以完成小型自动化设备的集中控制,也能由互联网的多台计算机完成复杂的大型分布式监控。因此该上位机监控系统采用国内使用较为广泛的组态王软件。使用组态王的图形控件可高效完成人机界面编程,利用实时数据库系统可使用户不需深入现场,就可获得现场数据,优化控制过程,提高道口通行安全。
3.1 后台设置
组态王与可编程控制器之间通过串行口交换数据,在组态王中选择可编程控制器作为外部设备之后,便可以通过上位机与可编程控制器I/O口的定义及相应串口设置来交换数据。
在组态王的数据词典中,系统和自定义变量包含丰富的基本类和特殊类变量,基本类包括内存和I/O变量。与外部设备进行数据交换均由I/O变量完成。因此,系统上位机和下位机进行数据上传或下载时,均要设置I/O变量,同时将内部运算的中间变量设置为内存变量。
上位机与下位机要完成数据交互,还需进行通信配置。首先要选择通信方式,常用的是RS-232串行通信,在此基础上要选择通信端口和相应的通信参数。下位机的参数设置需要通过D8120寄存器来进行设置,上述通信设置对应的额控制字为H0436。
3.2 前台设计与网络发布
要完成上位机的人机交互界面设计,首先要在开发环境中建立工程,根据交互需求构建静态或动态图形对象,将若干个对象按照叠加方式生成画面,静态画面可由动画链接完成变量与图素的映射关系。由下位机采集的道口现场数据可实时反映到上位机人机交互画面上。上位机监控的各种典型实时监控状态如图5所示。
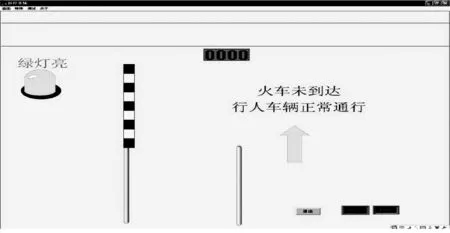
(a) 道口初始状态

(b) 列车进入检测区状态

(c) 远程浏鉴器监控状态

(d) 远程浏览器监控状态图5 上位机监控状态图
为了实现远程监控,首先必须在组态王工程浏览器窗口中选择联网模式,并与计算机应该绑定TCP/IP协议,在网络参数页中选择连网选项,设置节点为本地服务器IP地址。在远程计算机端的浏览器地址栏输入该地址,可看到如图5(d)所示的远程前台界面,可通过界面上的控制元件远程控制防护设备的动作。
4 监控系统调试结果
为了进一步检验监控系统是否能够实现设计目标,各执行元件的逻辑动作是否满足设计要求,根据铁路平交道口信号控制要求,搭建了模拟道口控制的现场实验平台,如图6所示。在进一步的调试和模拟运行中,发现并解决了设备、程序、工艺等方面出现的问题。通过现场实验,证明了该控制系统下位机输入检测和输出逻辑控制满足控制要求,具有较好的稳定性。上位机数据监测实时性和人机交互良好,本地控制和远程控制灵敏有效,便于操作,可远程控制多个道口节点,能够满足道口信号控制要求。下一步可通过无线通信技术,将预警信息反馈至机车司机,使综合预警监控形成闭环系统。

图6 系统现场调试与模拟运行图
5 结 语
近些年来,为了提高平交道口管理水平、运输效率和安全性,道口信号控制出现了单片机控制、基于多参数逻辑运算的城市平交道口交通信号控制、嵌入式无人值守道口控制等控制方式,组态王和可编程控制器构成的监控系统设计与实现也为现代平交道口信号控制提供了一种有效参考。未来道口信号控制的发展在系统构成规模上,向体积更小、速度更快、功能更强、价格更低的小型化或微型化方向发展。同时向智能化和网络化方向发展,开发出各种智能模块,不断增强过程控制能力,通信联网功能不断增强。
[1] 陈海伦.铁路道口智能预警与控制系统综述[J].铁路通信信号工程技术,2013(4):89-91.
[2] 杨冰梅,薛骏,王黎,等.铁路道口预警与防护系统综述[J].铁道技术监督,2007,35(11):28-32.
[3] Cho B K, Ryu S H, Hwang H C, et al. Intelligent Control System for Railway Level Crossing Safety[J]. Lecture Notes in Electrical Engineering, 2012(215):309-317.
[4] Metaxatos P, Sriraj P S. Pedestrian Safety at Rail Grade Crossings: Focus Areas for Research and Intervention[J]. Urban Rail Transit, 2015, 1(4):1-11.
[5] 李文峰,吕红娟.铁路平交道口无线安全监控系统[J].电子设计工程,2015(20):127-129.
[6] 阚建平,卢斌,王照勇.铁路道口列车接近安全预警系统[J].铁道通信信号,2016,52(8):55-59.
[7] 康劲松, 朱振, 顾雄. 基于PLC的铁路道口自动控制系统设计[J]. 机电一体化, 2011, 17(7):50-54.
[8] 蒋爽,袁成奎.基于VxWorks的复杂道口监控系统软件研究[J].铁道通信信号,2011,47(1):8-10.
[9] 李广铭.铁路道口信号自动防护系统研究与应用[J].武钢技术,2009,47(1).
[10] 乔寿合.铁路道口信号设备远程监测系统[D].山东:山东大学,2015.
DESIGNANDAPPLICATIONOFRAILROADGRADECROSSINGINTELLIGENTTRAFFICMONITORINGSYSTEM
Wei Wei1Chen Ning1Zhao Pengxuan1Huang Yizhong2
1(Xi’anUniversity,Xi’an710065,Shaanxi,China)2(Xi’anZhongRuiRailwayNewTechnologyCo.,Ltd.,Xi’an710065,Shaanxi,China)
Aiming at the lack of comprehensive traffic automatic warning and monitoring of the railway crossing, a set of unmanned traffic monitoring system was designed. The remote computer used PLC as the control core, had the effective control of road traffic warning signs and equipment and also built the establishment of a dynamic link with the PC monitoring system constructed by Kingview and remoted monitoring computer to achieve local and remoted monitoring of crossing. Experimental results showed that the system had the characteristics of multi-mode operation, automatic control, high safety and stability and low maintenance cost. It could play a role in reducing traffic accidents and improving the efficiency of transportation.
Railroad grade crossing Traffic Monitor
2017-03-02。陕西省教育厅专项科研计划项目(16JK2197);西安中瑞铁路新技术有限公司横向科研项目(HG2016-2)。韦炜,副教授,主研领域:机械工程测试与控制。陈宁,硕士生。赵朋轩,硕士生。黄一中,高工。
TP3
A
10.3969/j.issn.1000-386x.2017.12.025
