基于AR-HUD的汽车驾驶辅助系统设计研究*
2018-01-02郑杨硕
李 卓 周 晓 郑杨硕
(武汉理工大学汽车工程学院 武汉 430070)
基于AR-HUD的汽车驾驶辅助系统设计研究*
李 卓 周 晓 郑杨硕
(武汉理工大学汽车工程学院 武汉 430070)
为改善驾驶员的驾驶分心和认知负荷,提出融入增强现实的抬头显示驾驶辅助系统原型,通过不同可见度条件下的驾驶员危险认知行为测试、语义差异法和口语分析法,从客观与主观,定性与定量两方面对该系统的有效性进行评价.结果表明,在低可见度条件下,AR-HUD系统可显著提高驾驶员对危险情景的反应时间.实验结果部分验证了AR-HUD系统原型的有效性.
AR-HUD;视觉符号;危险认知行为;评价量表
0 引 言
车载信息系统丰富了驾驶员的驾驶体验,由车内次级任务引起的驾驶分心也严重影响了驾驶员的驾驶效能和交通安全.为减少驾驶员的视觉分心,汽车厂商将抬头显示技术(HUD)应用到车上[1-3].与传统的仪表盘显示相比,HUD将车况、路况和外界环境等信息直接投射到挡风玻璃上,减少驾驶员因低头而导致的驾驶分心,提高驾驶安全.据统计,HUD可以降低25%车辆碰撞[4].
增强现实技术(AR)是在虚拟现实技术(VR)基础上发展起来的一种新型的人机交互技术,它能将计算机生成的虚拟对象与真实环境场景相融合,提供虚实结合的增强现实场景[5].AR与HUD结合,可以将识别到的驾驶安全警示信息直接投影到前挡风玻璃上,与真实的道路环境相融合,在提高驾驶体验的同时,也降低了驾驶员的认知负荷,提高危险认知能力.由于其不切断真实驾驶情景、虚实结合、实时交互的特点,将对未来汽车辅助驾驶、车载娱乐、导航的发展起到了强大的驱动作用.
1 AR-HUD 系统原型
1.1 目标识别
AR-HUD系统开始于对前方障碍物的识别,包括前方的车辆、行人、交通信号、车道等.本系统采用毫米波雷达与CCD摄像机相结合的方法,对前方障碍物进行精确检测[6].其流程见图1.

图1 流程图
毫米波雷达获取的前方有效目标信息与CCD图像传感器摄像机获取的CCD图像信息相融合,并划分出可能的障碍物区域,即感兴趣区域.利用Adaboost算法训练得到级联分类器,对感兴趣区域的障碍物进行精确的识别.
1.2 信息组织
如果将AR-HUD系统识别到的信息全部投影到驾驶视野中,不但不会减少驾驶员的驾驶分心,反而会干扰真实的驾驶环境,造成更为严重的认知负荷.因此,需要对系统识别的信息进行有效的筛选.
文中AR-HUD系统主要由碰撞警示信息和导航信息两部分组成.根据国际标准化组织ISO制定的前碰撞告警系统的标准和评价规程ISO 15623,碰撞警示信息主要包括前碰撞警示、车辆并道警示、转弯碰撞警示以及前方行人和非机动车警示.另一方面,系统将CCD图像与GPS导航系统的导航信息相匹配,将转弯、变道、车道偏离的提示信息实时投影到道路环境中.
1.3 视觉设计
AR-HUD系统呈现的警示信息需要以视觉符号的形式呈现在驾驶员视野中.按照危险等级的不同,AR-HUD系统被分为预备碰撞告警和碰撞告警两种危险情景.在视觉设计的过程中,需要分别考虑两种情景下视觉符号的形状、颜色、位置、亮度以及显示间隔,既要能够引起驾驶员充分的注意,又不能干扰真实的驾驶环境,产生额外的驾驶分心[7-8].
AR-HUD系统界面在不同驾驶情景下的视觉符号见表1.其中预备碰撞告警采用黄色持续警示,碰撞告警采用红色闪烁警示,导航信息采用绿色持续警示.

表1 AR-HUD系统视觉符号
1.4 三维注册
为了使AR-HUD系统提供的不同驾驶情景的视觉符号与驾驶员视野相匹配,需要将CCD图像的坐标系统与驾驶员坐标系统相匹配,这个过程被称为三维注册[9].通过提取CCD图像和驾驶员视野图像中的特征点,利用自动匹配方法SIFT/SURF算法匹配这些对应的特征点,以提取共轭点.最后,应用全息投影变换将所提供的驾驶安全辅助信息投影到驾驶员视野中.
1.5 虚实融合
经过目标识别,信息筛选,视觉符号生成以及三维注册,AR-HUD系统所提供的驾驶安全辅助信息被投影到驾驶员视野中.投影到前挡风玻璃上的信息需要保证日间亮度充足,夜间亮度不刺眼.图2为系统的界面原型.这些图片是由驾驶员座椅前方的摄像机拍摄所得.

图2 AR-HUD系统界面
该AR-HUD系统的目的是为了减少驾驶员的驾驶分心和认知负荷,提高驾驶安全性.为验证该系统的有效性,通过设计实验来评估在不同的可见度情景下,AR-HUD系统对驾驶员危险认知反应行为的影响.
2 实 验
2.1 参与者
被试者是从武汉市随机选取的30名驾驶员,其中男性18名,女性12名.被试者被随机分配为两组:AR-HUD组和对照组.
被试者的平均年龄、驾龄,以及累积驾驶里程见表2.单因素方差分析(ANOVA)的结果显示,两组数据无统计上的显著差异.
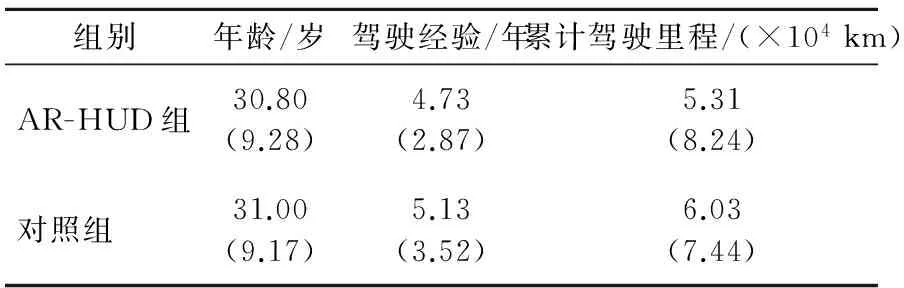
表2 被试者的年龄、驾龄和累积驾驶里程
2.2 实验准备
实验采用动态视频法评估AR-HUD系统对驾驶员典型危险情景认知反应行为的影响.以驾驶员的视角,分别在不同人流密度和交通密度的市区街道和周边公路,拍摄了多组动态交通视频.视频包括日间和夜间两种不同可见度情景.结合文献[4]提出地开发驾驶员危险知觉测试的五原则和交通安全领域相关专家的建议,对视频进行筛选和剪辑,最终筛选出10段典型危险情景视频片段和一段包含AR-HUD系统全部警示信息的练习视频.危险情景视频持续时间在15~20 s之间,练习视频持续80 s.10段典型危险情景视频均包含一个潜在的道路危险.具体为:日间和夜间驾驶环境下的追尾,前车变道,侧撞,行人以及易受伤害的非机动车.
实验设备见图3,被试者被要求坐在模拟驾驶器的前方,距离前方80 cm有一个前挡风玻璃.投影仪1将视频片段投影到最前方的屏幕上,投影仪2将AR-HUD系统提供的警示信息投影到前挡风玻璃上,摄像机被用来追踪驾驶员的视野.

图3 实验设备
在正式实验前,所有被试者将被要求进行一个简单反应时测试.其测试结果见表3.由表3可知,两组数据无统计上的显著差异.

表3 被试者的平均反应时间
2.3 实验
实验之初,两组被试者被要求观看一段包含AR-HUD系统全部警示信息的视频,以对实验目的、AR-HUD系统界面各视觉符号的含义有所了解.随后,进行驾驶员危险认知行为的测试实验.
实验假设AR-HUD系统界面能够有效的帮助驾驶员提高危险情景的反应时间,因此通过记录两组被试者发现视频中交通冲突的时间来验证假设.在视频片段的播放过程时,被试者被要求观察视频中的驾驶情景,当发现视频中的交通冲突时,踩下模拟驾驶器的刹车踏板,并描述此交通冲突.将交通冲突定义为驾驶员预测到前方其他道路使用者的行为可能会引发危险,采取必要的安全措施以避免发生交通事故.实验人员记录被试者的反应时间以及对交通冲突描述的口语报告.随后,AR-HUD组的被试者被要求完成一份对AR-HUD系统界面有效性的评价量表.评价量表的设计采用Likert量表法,对AR-HUD系统界面原型的有效性、干扰性及可靠性性进行评估,其评价指标分类及对应问题见表4.评价量表由7个等级组成,1代表完全不同意,7代表完全同意.

表4 评价量表
3 分析与讨论
3.1 实验数据分析
对比有无AR-HUD两种状态,驾驶员对不同危险驾驶情景的反应能力,并结合评价量表的得分,评估系统的有效性.实验共收集30名被试者的危险反应时间和15份有效的评价量表.
3.1.1危险反应时间
被试者的平均反应时间数据及条形图见表5和图4.数据显示,在各危险驾驶情景中,AR-HUD组的反应时间均低于对照组,并且数据浮动更小.利用单因素方差分析对数据进行近一步分析(选取显著性水平ɑ=0.05,查表得F0.05(1,13)=4.67).对于低可见度视野条件下潜在的侧撞风险,前方行人和非机动车三类危险情景,两组数据有统计上的显著差异.而在正常的可见度条件下,两组数据差异较小.

表5 被试者平均反应时间

图4 被试者平均反应时间条形图
3.1.2评价量表得分
被试者对评价量表的得分数据折线图见图5,单因素方差分析的结果显示,两组数据无统计上的显著差异.数据显示:
1) 夜间条件下的安全警示信息得分比日间提高18%,通过口语报告分析可得,在日间,驾驶员一般能够及时的发现潜在的驾驶风险,而AR-HUD系统提供的警示符号投影到了视野前方,对前方视野有所遮挡,驾驶员因此不能及时对前方障碍物的状态作出准确的判断.而在低可见度条件下,由于视野模糊,AR-HUD系统提供的警示符号能很好的提醒驾驶员前方出现的障碍物.
2) AR-HUD系统导航信息视觉符号覆盖了整个车道,并且亮度比较高,遮盖了真实的道路状况.驾驶员容易沉浸在AR-HUD系统中,而忽略了道路中检测不到的潜在危险,例如坑洼、结冰的路面、较小的障碍物等.
3) 按照不同年龄层来看,年长者对该系统的评分最低,认为真实的驾驶环境更加可靠.AR-HUD系统对驾驶环境的遮挡反而使驾驶过程更加紧张.按照不同性别来看,女性对该系统的各项评分均高于男性,认为该系统能够有效的帮助驾驶员判断潜在的驾驶危险,使驾驶过程更加轻松.

图5 评价量表得分折线图
3.2 结果讨论
实验结果部分证明了该系统的有效性,但在正常可见度条件下,两组被试者的危险反应时间数据并没有统计上的显著差异.原因可能是被试者的数量较少,数据上存在误差.另一方面,实验过程是基于模拟驾驶器进行的,尽管这种方法能够较为简单的收集到被试者的反应时间,但仍与真实的驾驶状态有所区别,造成实验数据不精确.因而,正常可见度条件下,AR-HUD对驾驶员危险认知行为的影响,需要进一步的研究.
通过实验数据的分析,总结系统界面设计需要注意的问题:①视觉符号的设计应采用简洁的形态,尤其应注意大小比例,避免与背景物体形成冲突而干扰了驾驶员对危险情景的判断.②视觉符号的亮度应该能够根据环境的变化进行调解,保证其引起驾驶员足够的注意力的同时又不会对真实驾驶环境的产生干扰.
4 结 束 语
增强现实技术与抬头显示技术的结合,反映了未来汽车智能化、信息化的重要标志,对未来辅助驾驶、车载娱乐以及导航的发展起到强有力的推动作用.文中分别从AR-HUD驾驶安全辅助系统的目标识别、信息组织、视觉设计、三维注册以及虚实融合模块进行了探索.为验证该系统的有效性,文中设计一个较为完整的测试实验,通过危险反应时测试、语义差异法和口语分析法,从客观与主观,定性与定量两方面对AR-HUD驾驶安全辅助系统进行考量.为进一步规范该系统的信息组织准则和视觉设计策略提供理论依据.
[1] 王兴,秦齐.车载平视显示技术[J].电光与控制,2014(1):55-58.
[2] 张桂伟,姜立军.中国汽车市场抬头显示现状探究[J].工业设计,2015(10):67-68.
[3] 朴范鎮,李锋,姜元义.基于模拟驾驶器的HUD信息分析[J].交通标准化,2012(2):82-85.
[4] GIBBERED D L,JAMSON S L,CARSTEN O M J. Managing in-vehicle distraction: evidence from the psychological refractory period paradigm[C].The 2nd International Conference on Automotive User Interfaces and Interactive Vehicular Applicationsp,Pittsburgh,2010.
[5] 谭浩,谭纪宇,景春晖.汽车人机交互界面设计[M].北京:电子工业出版社,2015.
[6] 骆云志,雷雨能,王钤.基于毫米波雷达和CCD摄像机信息的D-S融合方法[J].数据采集与处理,2014(4):648-653.
[7] PARK H, KIM K H.Efficient information representation method for driver-centered ar-hud system[J].Design,User Experience,and Usability,2013(1):393-400.
[8] 王建美,罗卫东,曹博.车载HUD的人机界面设计[J].自动化仪表,2015(7):85-87.
[9] 张立鹏.基于自然特征的增强现实实时跟踪研究[D].上海:华东理工大学,2013.
Design and Research of Vehicle Driving Auxiliary System Based on AR-HUD
LIZhuoZHOUXiaoZHENGYangshuo
(SchoolofAutomotiveEngineering,WuhanUniversityofTechnology,Wuhan430070,China)
In this paper, an in-vehicle augmented reality head-up display driving assistant system prototype was proposed to improve the driver’s visual distraction and cognitive load. In order to examine the effectiveness of this system from both objective and subjective, qualitative and quantitative aspects, an experiment on driver’s risk perception behavior under normal visibility and low visibility conditions was conducted, and an AR-HUD system evaluation scale was introduced. The results show that the AR-HUD system significantly increases the response time of drivers to the risky situations under low-visibility conditions. These experimental results partially confirm the effectiveness of this AR-HUD system prototype. The validity of the AR-HUD system prototype is verified by experimental results.
AR-HUD; visual symbols; risk perception and behavior; evaluation scale
U463.6
10.3963/j.issn.2095-3844.2017.06.007
2017-10-14
李卓(1978—):男,博士,副教授,主要研究领域为车身工程与创新设计
*中央高校基本科研业务费项目(20410953)、2016年度国家社会科学基金艺术学青年项目(16cg170)资助
