城轨塞拉门虚拟样机建立方法研究
2018-01-02王亚东王祖进
王亚东,王祖进
(南京康尼机电股份有限公司,江苏 南京 210038)
城轨塞拉门虚拟样机建立方法研究
王亚东,王祖进
(南京康尼机电股份有限公司,江苏 南京 210038)
基于RecurDyn和Matlab/Simulink的机电联合仿真分析功能,模拟了城轨塞拉门的开关门过程,提出了一种城轨塞拉门虚拟样机建立方法。首先建立机械系统仿真模型,然后采用速度、电流双闭环控制建立控制系统仿真模型,再将机械系统与控制系统相结合建立机电联合仿真模型。对仿真模型进行仿真分析,将仿真结果和实验结果进行对比,根据对比结果对机械系统和控制系统的仿真模型进行修正。最后对塞拉门的部分亚健康工况进行了仿真模拟,进一步验证了机电联合虚拟样机的正确性。
塞拉门;虚拟样机;机电联合仿真;控制系统仿真;无刷直流电机
0 引言
传统的轨道塞拉门设计常采用方法是先进行门系统的需求分析,然后生产研制出样机,然后再进行门系统的工作运行实验,当通过实验发现问题时,需要修改设计,再加工样机,再进行样机实验,如此反复进行,设计开发过程周期长、成本高。
随着计算机技术的快速发展而发展起来的控制系统虚拟样机技术[1-4],是以控制理论为核心,加上成熟的三维计算机图形技术和基于图形的用户界面技术,将分散的设计和分析技术集成在一起对设计产品进行虚拟性能测试的一种高新技术。它可以在很短时间内完成多次物理样机无法完成的仿真试验,分析不同的设计方案,直至获得样机模型整机系统的优化方案。另外,还能够进行系统不同工况的试验,如不同温度下的性能测试等。利用虚拟样机技术不但可以降低开发成本、缩短开发周期,而且可以极大地提高产品设计的质量[5-6]。
因此,本文采用虚拟样机技术,建立塞拉门的虚拟样机仿真平台,解决通过样机实验进行设计以及机械工程师和电气工程师分开设计的缺陷,提供一种轨道交通车辆塞拉门虚拟样机建立方法,真实地反映轨道车辆塞拉门的运动机理,研究机械系统和控制系统间性能的相互影响,从机电一体化的角度解决机械工程师与控制工程师的设计协作问题,使门系统设计在机械、电子与控制各方面达到良好匹配,为门系统的研发提供一套科学完整的方法,提高产品的研发速度。
1 建立机械系统仿真模型
1.1 建立三维装配模型
在SolidWorks软件环境下,对城轨塞拉门进行三维建模和装配,并将装配模型转换为 RecurDyn可导入的.x_t格式文件。城轨塞拉门主要由承载驱动机构、平衡轮组件、门扇、下摆臂组件、上滑道组件等组成,如图1所示。承载驱动机构通过电机驱动丝杆,从而带动锁闭组件进行运动,锁闭组件通过传动架、铰链座、滑筒以及携门架将驱动力传递到门扇上,从而驱动门扇实现开关门动作。

图1 城轨塞拉门三维装配模型
1.2 运动关系设置
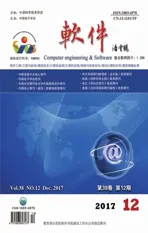
对仿真模型中各零部件间的约束副进行设置[7-8],主要零部件间的约束关系如表1所示。
1.3 接触参数设置
对门系统中的接触副进行定义,具体包括:锁闭组件和丝杆间的接触、锁闭组件内的接触、尼龙滚轮和上滑道间的接触、摆臂滚轮和下导轨间的接触、平衡轮和门扇上压板间的接触,接触类型采用Geo Surface Contact,接触参数设置如表2所示,其中K为接触刚度、C为接触阻尼、ud为动摩擦系数、us为静摩擦系数、d为最大穿透深度、e为刚度指数。
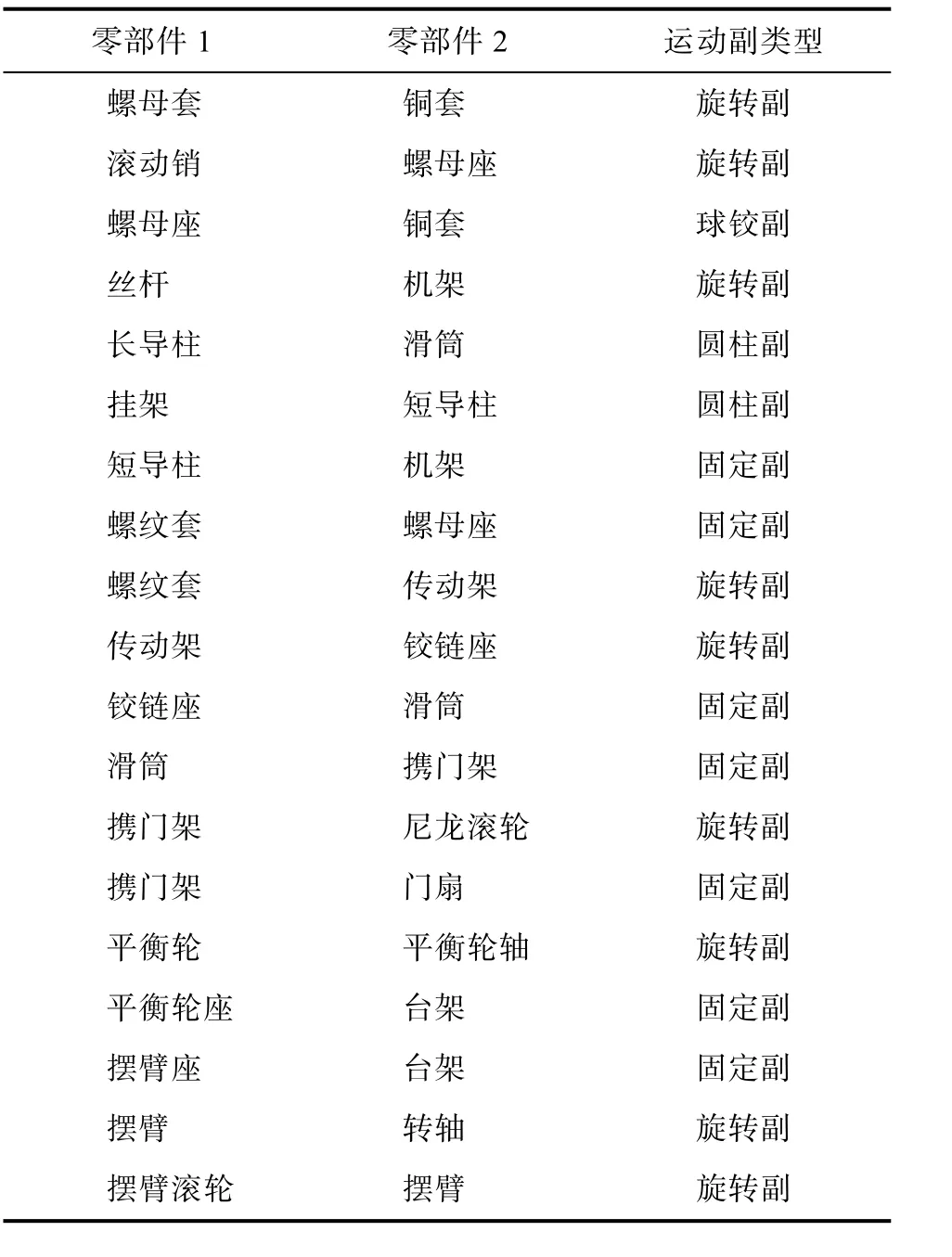
表1 主要零部件间的约束关系
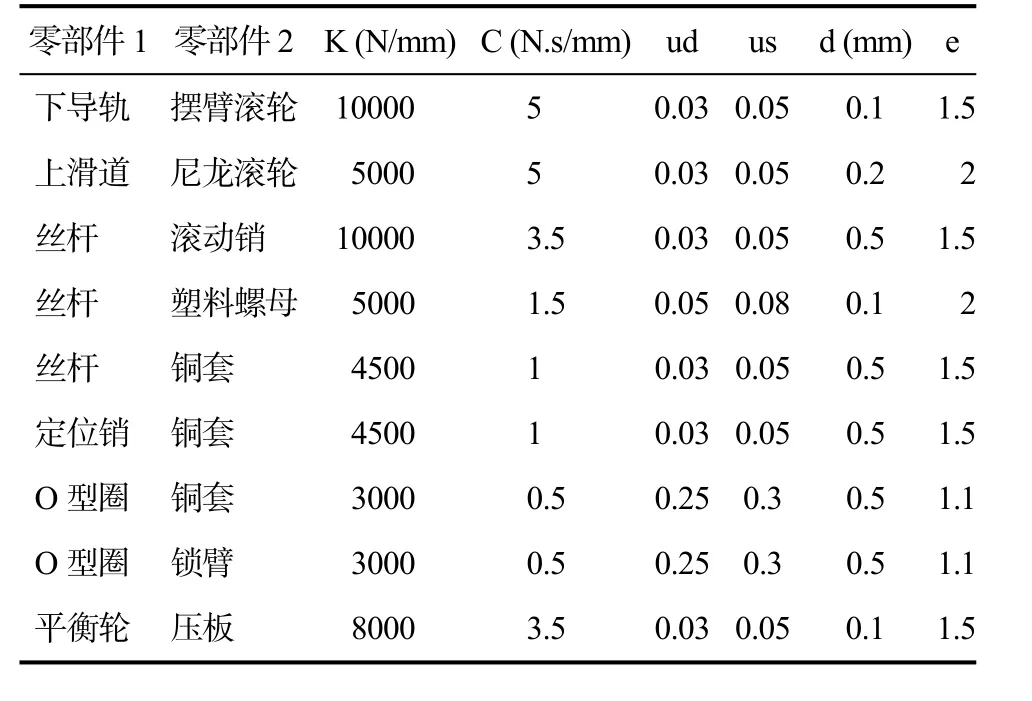
表2 接触副参数设置
2 建立控制系统仿真模型
2.1 建立电机仿真模型
在Matlab/Simulink软件环境下,对直流无刷电机进行建模,包括:电机本体建模、三相逆变器建模、换向逻辑控制建模、转速控制建模等。其中采用永磁同步电机模块来搭建直流无刷电机,选用直流电压源,三相逆变器采用Universal Bridge模块,换向逻辑控制模块利用三个霍尔传感器信号、PWM信号和转速信号组合解码生成逆变桥开关器件的控制信号,整个控制系统采用PWM调速。
2.2 双闭环控制
城轨塞拉门控制系统采用的是速度和电流双闭环控制[9-11],根据实际门控器的控制逻辑建立双闭环控制系统仿真模型,包括:内环电流PI控制和外环速度PI控制,如图2所示。
图2 双闭环控制系统
3 建立机电联合仿真模型
首先,在机械系统仿真模型中建立输入与输出,其中输入为丝杆的转速,输出为门系统实现开关门动作所需的驱动扭矩。建立M文件,设置采样周期为1 ms。然后,运行Matlab程序,将工作路径设置为 M 文件和 RecurDyn机械模型的存储目录。在Matlab命令窗口中输入M文件名,接着输入rdlib,弹出包括RecurDyn Plant Block的Simulink窗口。打开一个新的 Simulink模型窗口,并把 RecurDyn Plant Block拖至该窗口。最后,定义控制系统框图。
4 仿真分析及模型修正
4.1 开门仿真分析
设置采样时间为5×10-7s,设置仿真时间为3s,对机电联合仿真模型进行仿真分析,得到电机的转速曲线和电机的驱动电流曲线。将仿真结果与实验结果进行比较,如图3和4所示。若电机转速和电机电流的误差小于20%,说明所建模型的准确性及仿真分析的可行性;若两者误差大于20%,说明所建模型与真实模型存在较大的误差,调整模型参数,直至两者误差小于20%,至此,得到开门的虚拟样机模型。
4.2 关门仿真分析
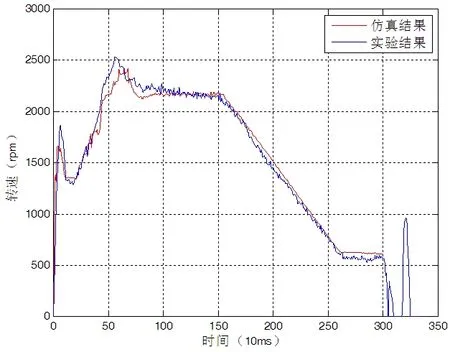
图3 电机转速的结果对比

图4 电机电流的结果对比
设置采样时间为5×10-7s,设置仿真时间为3s,对机电联合仿真模型进行仿真分析,得到电机的转速曲线和电机的驱动电流曲线。将仿真结果与实验结果进行比较,如图5和6所示。若电机转速和电机电流的误差小于20%,说明所建模型的准确性及仿真分析的可行性;若两者误差大于20%,说明所建模型与真实模型存在较大的误差,调整模型参数,直至两者误差小于20%,至此,得到关门的虚拟样机模型。
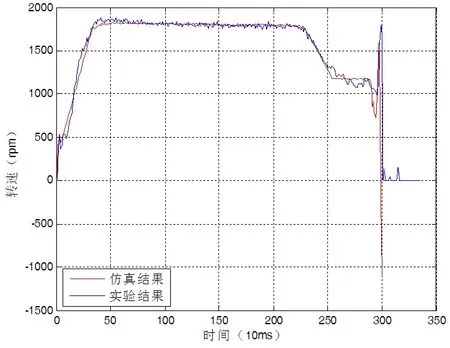
图5 电机转速的结果对比
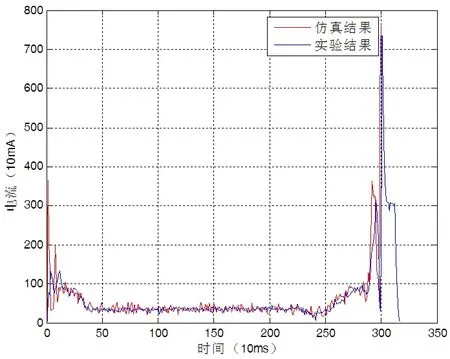
图6 电机电流的结果对比
4.3 模型修正
模型修正包括机械系统模型修正和控制系统模型修正。其中,机械系统模型修正主要是对部分运动位置的运行阻力进行了修正,使得门系统在开关门过程中的运行阻力是变化的,这样设置符合门系统的实际运行工况。控制系统模型修正主要是对各个运动阶段的PI参数和限幅值进行修正,使得电机的转速和电流输出与实验数据更加吻合,进一步提高仿真模型的精度。
5 虚拟样机验证
5.1 关门高速段局部阻力亚健康模拟
通过对正常开关门的局部施加压力模拟真实情况中的开关门所受的局部压力。首先,对关门高速段局部阻力进行机电联合仿真分析。设置采样时间为 5×10-7s,设置仿真时间为 3s,对关门高速段局部阻力仿真模型进行仿真分析,得到电机的转速曲线和电机的驱动电流曲线。将仿真结果与实验结果进行比较,如图7和8所示。根据仿真和实验的结果对比,可以看出关门高速段局部阻力仿真模型具有很高的精度。
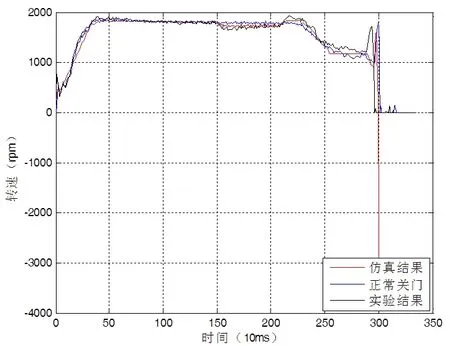
图7 电机转速的结果对比
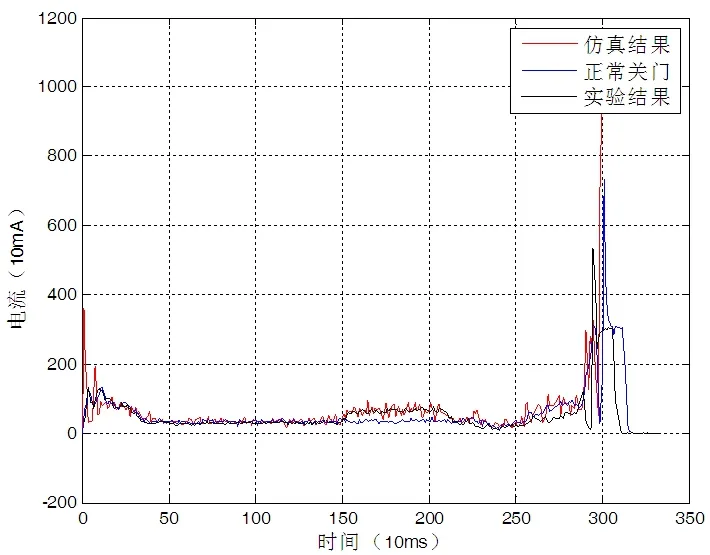
图8 电机电流的结果对比
5.2 开门高速段局部阻力亚健康模拟
对开门高速段局部阻力进行机电联合仿真分析。设置采样时间为5×10-7s,设置仿真时间为3s,对开门高速段局部阻力仿真模型进行仿真分析,得到电机的转速曲线和电机的驱动电流曲线。将仿真结果与实验结果进行比较,如图9和10所示。根据仿真和实验的结果对比,可以看出开门高速段局部阻力仿真模型具有很高的精度。
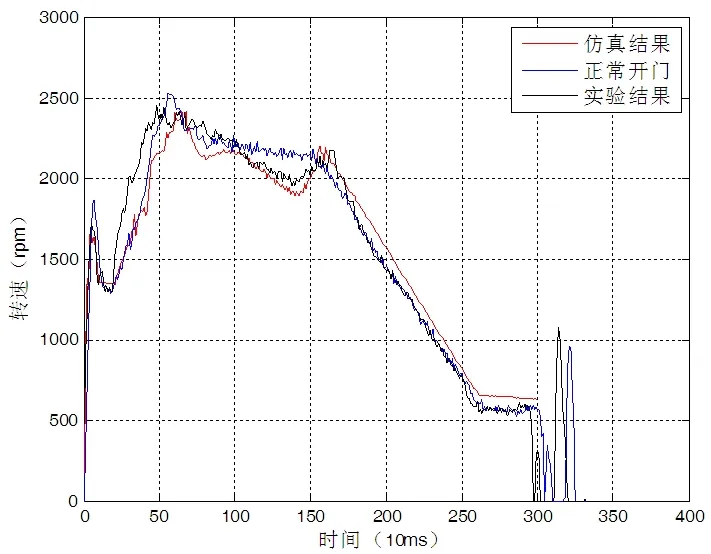
图9 电机转速的结果对比
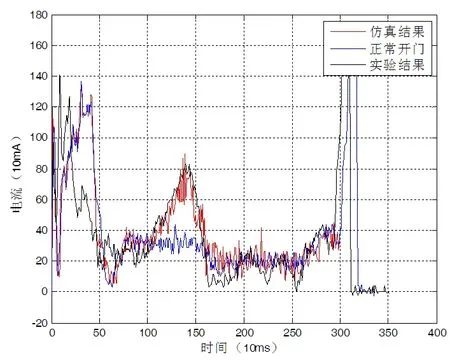
图10 电机电流的结果对比
6 结论
基于RecurDyn和Matlab/Simulink的机电联合仿真功能,提出了一种城轨塞拉门机电联合虚拟样机建立方法。对整个门系统的开关门过程进行了机电联合仿真,得到了电机的输出转速和驱动电流,并与实验数据进行了对比,根据对比结果对机械系统和控制系统的模型参数进行了修正,并通过故障模拟和亚健康工况模拟对虚拟样机模型进行了验证,最终得到了高精度的机电联合虚拟样机模型。文中方法避免了传统分析方法需要在实际样机完成后才能进行的缺点,直接通过计算机虚拟环境就可以定量、准确分析门系统的性能,可大大降低开发成本、缩短开发周期,降低产品开发的风险。该方法还可以推广应用到其他类似的复杂控制系统的仿真分析中,实现快速、高质量、低成本的设计目标,具有很高的参考价值。
[1] 袁亮, 于春梅. 虚拟样机环境下机械臂模型验证与控制系统仿真[J]. 机械设计与制造, 2016, (5): 5-8.
[2] 于春梅, 易奎, 侯惠让, 等. 基于虚拟样机技术的控制系统实验平台开发[J]. 实验技术与管理, 2014, 31(2): 82-84.
[3] 周进, 张东升, 梅雪松, 等. 基于虚拟样机技术倾转四旋翼飞行器联合仿真[J]. 计算机仿真, 2015, 32(1): 94-98.
[4] 张静波, 程力, 胡慧斌, 等. 基于虚拟样机的反后坐装置故障仿真技术研究[J]. 计算机测量与控制, 2012, 20(5):1287-1289.
[5] 王蕾. 虚拟样机技术在某悬架系统设计中的应用[J]. 汽车工业研究, 2017, (4): 54-59.
[6] 汤晓燕, 刘少军, 云忠. 基于虚拟样机技术的深海采矿主动式升沉补偿系统设计[J]. 北京工业大学学报, 2008,34(5): 454-458.
[7] 赵庆松, 孙伟. 震实式造型机工作台翻转机构的设计与运动仿真[J]. 现代制造技术与装备,2015, (2): 24-25.
[8] 黄继承, 李显旺, 沈成, 等. 苎麻联合收割机切割器的运动仿真和结构分析[J]. 中国农机化学报, 2013, 34(6):170-173.
[9] 程启明, 杨小龙, 高杰, 等. 基于参数可变PID控制器的永磁无刷直流电机转速控制系统[J]. 电机与控制应用, 2017,44(1): 18-22.
[10] 徐志书, 李超, 何雨昂. 基于Matlab/Simulink方波直流无刷电机位置伺服仿真研究[J]. 电子技术与软件工程, 2016,(10): 136-137.
[11] 魏江鹏, 文程祥, 涂世军. 基于Matlab的永磁无刷直流电机仿真控制系统[J]. 装备制造技术, 2016, (12): 47-48.
Research on the Establishment Method of the Virtual Prototype of the City Track Sliding Plug Door
WANG Ya-dong, WANG Zu-jin
(Nanjing Kangni Mechanical&Electrical Co., Ltd, Nanjing 210038, China)
Based on the electromechanical co-simulation function of RecurDyn and Simulink, the opening and closing process of the sliding plug door was simulated, and an establishment method of the virtual prototype was proposed. Firstly, the simulation model of the mechanical system was established, then the speed and current double closed-loop control was used to simulate the control system. The mechanical system was combined with the control system to establish the electromechanical co-simulation model, then the co-simulation model was simulated and analyzed, and the simulation results were compared with the experimental results. According to the comparison results, the simulation models of the mechanical system and control system were modified. Finally, the simulation of the partial sub-health conditions of the sliding plug door were carried out, which further verified the correctness of the electro-mechanical integration virtual prototype.
Sliding plug door; Virtual prototype; Electromechanical co-simulation; Control system simulation;DC brushless motor
TP391.9
A
10.3969/j.issn.1003-6970.2017.12.059
本文著录格式:王亚东,王祖进. 城轨塞拉门虚拟样机建立方法研究[J]. 软件,2017,38(12):291-295