卡尔曼滤波技术在捷联惯性导航系统对准中的应用
2018-01-02刘增力
彭 汉,刘增力
(昆明理工大学信息工程与自动化学院,云南 昆明 650500)
卡尔曼滤波技术在捷联惯性导航系统对准中的应用
彭 汉,刘增力
(昆明理工大学信息工程与自动化学院,云南 昆明 650500)
本文首先阐述了卡尔曼滤波技术的简单理论,然后建立了捷联惯性导航系统初始对准的卡尔曼滤波模型, 并对静基座下的卡尔曼滤波初始对准精度进行分析,最后进行了卡尔曼滤波仿真。仿真结果表明,此方法算法简单,能有效缩短初始对准时间,对准稳态精度较高,是一种可靠的初始对准方案。
捷联惯性导航系统;初始对准;卡尔曼滤波
0 引言
惯性导航是一种自主导航方法,它是通过测量运载体本身的加速度来完成导航任务的。根据牛顿惯性原理,利用惯性元器件(陀螺仪、加速度计)测量出运载体的加速度,经过积分和运算,可得出速度和位置信息以供导航使用[1]。
所谓初始对准,就是在惯性导航系统尚未正式进入导航工作状态前,建立导航状态所必须的初始条件。20世纪 60年代初,卡尔曼滤波理论就开始应用到惯性导航系统中,从而为惯性导航系统的初始对准、速度阻尼和位置点重置提供了一种统一的方法,1965年,L.D.Brock[2]在其论文中利用卡尔曼滤波算法处理平台惯性导航系统的初始对准和标定问题。1967年,J.F.Bellantoni[3]将卡尔曼滤波用在捷联惯性导航系统的初始对准和标定中。当失准角为小角度时,SINS的误差方程可近似为线性方程,可以通过两位置对准、多位置对准和卡尔曼滤波器实现初始对准。目前,基于线性方程的初始对准技术已经比较成熟。
1 卡尔曼滤波理论
卡尔曼滤波属于最优估计理论,是一种递推线性最小方差估计法[4]。设离散系统状态方程和测量方程分别为

其中 Xk为k时刻的n维状态矢量,即被估计的状态矢量;Zk为k时刻的m维量测矢量;为k-1时刻的r维系统噪声;为n×r阶系统噪声矩阵,表征由 k -1到k时刻的各系统噪声分别影响k时刻各个状态的程度;Hk为k时刻的m×n阶测量矩阵; Vk为k时刻的m维量测噪声序列。
卡尔曼滤波要求 Wk-1和 Vk为互不相关的零均值白噪声序列[5],且

其中kQ和kR是系统噪声的方差阵和量测噪声的方差阵,该矩阵为已知的非负正定阵。kjδ是Kroneckerδ 函数,其统计特性为:

如果已知kt时刻的测量值为kZ,则kX 的估计值 ˆkX 按照下列方程求解:
状态一步预测方程:

在公式(6)中,作为状态 Xk-1的卡尔曼滤波估值,可以将 X ˆk-1认为是利用 k -1以前时刻的量测值计算而得到的;而 X ˆk/k-1则认为是用 X ˆk-1计算得到的对 Xk的一步预测。
状态估计值计算方程:

滤波增益方程:

一步预测方差:

估计均方误差方程:

或

上式为离散型卡尔曼滤波基本方程。只要给定初值 X ˆ0和P0,据tk时刻的量测量Zk,就可以递推出tk时刻的状态估计
2 捷联惯性导航系统初始对准滤波模型的建立
根据系统的误差传播方程可知[6]:陀螺和加速度计的误差均包含随机常值误差、一阶马尔科夫过程和白噪声误差这三种分量。马尔可夫过程的相关时间一般大于1小时,所以这种误差可近似视为随机常数,且与随机常值漂移相比小12~个数量级。所以,陀螺和加速度计误差模型可简化为[8]:

在实际工程运用中,由于捷联惯导系统的惯性器件(陀螺仪和加速度计)是直接固连在载体上,因此其误差也必然是在载体坐标系b系中得到的。而在本模型中,IMU误差则是在导航坐标系n中,因此需要将b系下的量转换到n系中:
由于本文的应用对象为舰船导航系统,因而可以将垂直通道对系统的影响忽略,并将陀螺仪和加速度计误差扩充为状态量。此时,系统的状态方程可以写成:

W( t)为系统噪声:

在公式(16)中, ax、 ay为加速度计在b系下的噪声, ωx、 ωy、 ωz为陀螺在b系下的噪声。加速度计和陀螺的噪声均为呈正态分布的白噪声,其均值为0、方差为 ()Q t。其中:
取水平速度误差为观测量,系统观测方程为:

通常情况下,实际应用中的传感器误差的可观测性是相当低的,甚至很多情况是不可观测的,在这种情况下,如果将滤波模型的维数增大,不但无法估计传感器的误差,反而会导致系统初始对准精度的降低。为了解决这个问题,可以把陀螺的常值漂移和加速度计的常值零偏不作为状态变量,使得滤波模型的维度从十维降到五维,以减少计算复杂度,同时可以令滤波估计变得更加稳定。这五维状态矢量为:

五维状态方程为:


3 静基座卡尔曼滤波初始对准精度分析
静基座或准静基座的卡尔曼滤波对准特点如下[7]:
(a)零速匹配(取 0v= )
在捷联惯导系统初始对准技术中,卡尔曼滤波技术是一种运用外界的测量信息来估计系统误差项的初始对准方法,在整个初始对准过程中,都需要利用其他的测量元器件测量外界测量信息,而这些外界测量信息的测量精度与产生的误差都会对滤波器的状态估量产生相应的影响。在静基座或准静基座的条件下,可以直接令外界测量信息为零速度,以此避免速度测量误差对滤波器的影响,使得系统在对准的速度和精度上都有一定程度的提高。
(b)状态估计矢量降维
在静基座条件下,默认载体的初始位置不变,那么初始对准的载体位置是不需要进行修正的。因此可以将载体位置误差从状态估计矢量中去除,降低卡尔曼滤波器的维数,同时降低计算量以减少计算负担。
(c)器件误差在地理坐标系上不变
在静基座条件下,从滤波器的角度来看,可以把陀螺的常值漂移和加速度计的常值零偏状态直接设置在地理坐标系上。然后直接使用数字平台转化到载体坐标系上即可。这样就可以按照平台惯性导航的分析方式分析捷联惯性导航的对准精度,简化精度分析过程。
下面建立静基座情况下初始对准卡尔曼滤波器。
由惯性导航系统的误差方程,在静基座条件下,系统的真实速度为0,该误差方程可以被简化为:
根据静基座的特点,一方面,静基座条件下载体坐标系和地理坐标系不存在相对运动,器件误差在地理坐标系上也为常值,因此直接将地理坐标系上的器件误差设置为状态变量可以方便精度分析可;另一方面,由于位置误差无需估计和补偿,可将位置误差从状态估计矢量中去除。因此,可将系统的状态矢量设置为:

考虑到惯性元器件的噪声和在近似过程中的模型误差,可将系统误差状态矢量表示为:

由静基座对准得特点[9],当选取零速度作为量测信息时,此时的导航系统中,实际速度只有系统本身的振动或晃动。所以如果以零速为外测信息,那么测量误差可以写为:


捷联惯性导航所计算出得速度误差可以表示为:

其中 δ vE、 δvN分别为惯性导航计算出来得速度无差量。
将惯性导航速度方程与零速度方程作差即可得:


其中:

4 仿真实验
在静基座初始条件下进行计算机仿真。设置初始参数:
状态矢量 X ( 0) = 0 ;陀螺常值漂移 = 0 .02°/h ,随机漂移 = 0 .01°/h ;加速度计常值零偏随机零偏取滤波周期 T = 0 .1s。
经过卡尔曼滤波后,得到如下结果:
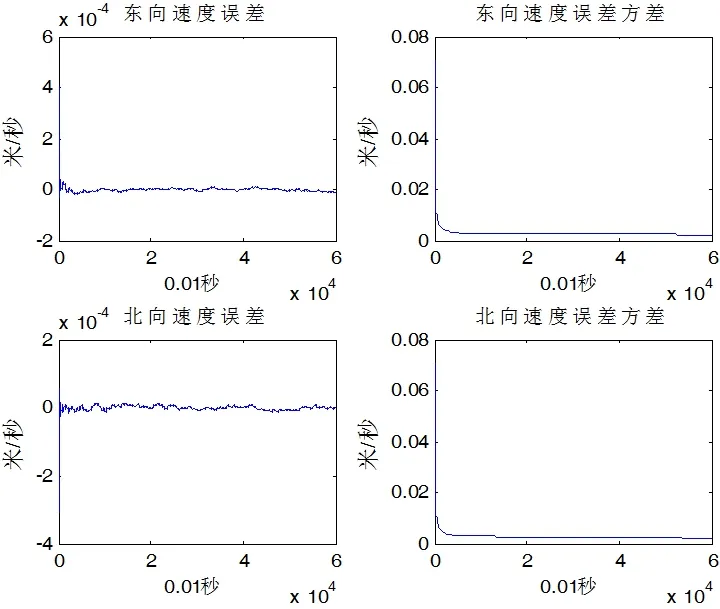
图1 仿真结果Fig.1 Simulation result
5 结论
经过上面的分析,进行计算机仿真实验后,由输出结果可以看出,在静基座初始条件下,经过卡尔曼滤波器处理后的速度误差在相当短的时间内就收敛于0并保持稳定。因此卡尔曼滤波技术在静基座下的捷联惯性导航系统初始对准中,能够起到提高系统对准精度的作用。
[1] 陈明辉. SINS误差特性及组合对准的方法研究[D]. 哈尔滨工程大学, 2008.
[2] Brock L D. Application of statistical estimation to navigation systems. MIT, 1965
[3] Bellantoni J F, Dodge K W. A Square Root Formulation of the Kalman-Schmidt Filter. Journal of AIAA, 1967, 5(7).
[4] 程向红, 万德钧. 捷联惯导系统的课观测性和可观测度研究. 东南大学学报, 1997, 27(6): 6-11.
[5] 雷曙光, 张柳, 林列书. 卡尔曼滤波在水下惯性导航系统中的研究及实现[J]. 舰船科学技术, 2015, 37(07).
[6] 李莹, 杨新, 李波. 捷联航姿系统航行状态下的组合对准算法研究[J]. 舰船电子工程, 2015, 35(02).
[7] 张义. 舰船捷联惯性系统初始对准技术研究[D]. 哈尔滨工程大学, 2012.
[8] 胡再刚. 基于H∝的传递对准方法研究[D]. 哈尔滨工程大学, 2007: 14-15.
[9] 陈哲. 捷联惯导系统原理. 北京: 国防工业出版社, 1986.
Application of Calman Filtering Technique in Alignment of Strapdown Inertial Navigation System
PENG Han, LIU Zeng-li
(Department of Communication Engineering, KunMing University of Science and Technology Kunming 650500, China)
This paper describes the simple theory of Calman filtering technology, and then established the Calman filter model of initial alignment of strapdown inertial navigation system, and Calman filter to initial static base alignment accuracy is analyzed, finally the simulation of Calman filter. The simulation results show that the algorithm is simple and can effectively shorten the initial alignment time, and the alignment steady state precision is high. It is a reliable initial alignment scheme.
Strapdown inertial navigation system (SINS); Initial alignment; Calman filtering
TN966
A
10.3969/j.issn.1003-6970.2017.12.027
本文著录格式:彭汉,刘增力. 卡尔曼滤波技术在捷联惯性导航系统对准中的应用[J]. 软件,2017,38(12):143-147
彭汉(1991-),男,硕士研究生,主要研究方向:现代数字信号处理。
刘增力,男,教授,硕士研究生导师,主要研究方向:现代数字信号处理。