基于遗传算法优化的模糊PID控制在粮食干燥中的应用
2018-01-02周晓光代爱妮王海霞
聂 放,周晓光,代爱妮,邢 颖,王海霞
(北京邮电大学自动化学院 教育部信息网络工程研究中心,北京 100876)
基于遗传算法优化的模糊PID控制在粮食干燥中的应用
聂 放,周晓光,代爱妮,邢 颖,王海霞
(北京邮电大学自动化学院 教育部信息网络工程研究中心,北京 100876)
针对传统控制算法在粮食干燥机的控制系统中控制效果不理想的问题,本论文提出了一种遗传优化的模糊PID控制算法,实现了粮食干燥机的自动控制。该算法结合了模糊控制和PID控制的优点,并且利用遗传算法的全局优化能力和并行能力优化模糊PID控制器的量化因子及其PID参数的修正系数,实现了最优控制。以控制系统的动态性能指标与稳态性能指标作为综合评价指标,建立了包含控制系统的调节时间、超调量和稳态误差三项指标的目标函数,基于该目标函数,利用遗传算法进行了模糊PID控制器的参数优化,改进了常规PID控制、常规模糊PID控制器的控制效果。最后,在MATLAB中,进行了控制性能的仿真与比较,仿真结果表明:粮食干燥机采用基于遗传算法优化的模糊PID控制后,其控制性能优于无优化的模糊PID控制以及常规的PID控制。该算法可为粮食干燥的实际控制策略提供有效的参考。
控制理论;模糊PID控制;遗传算法;粮食干燥;Matlab仿真
0 引言
粮食干燥是农业生产过程中的重要步骤和关键环节,其对象是一个有生命的有机体,在不断地进行着呼吸作用,水分含量是影响粮食呼吸作用强弱的最重要的因素,粮食干燥的目的在于降低粮食的水分,从而降低呼吸强度,利于安全储藏,但是,如果干燥条件过于强烈,粮食中的一些酶将失活,蛋白质将变性,使粮食失去生命力,从而对粮食品质产生一定的影响。
虽然粮食干燥机的结构较为简单,但粮食干燥是一个复杂的热质交换过程[1],它具有多变量、大滞后和非线性的特点,难以建立精确的数学模型,所以传统的控制方式(经典控制理论和现代控制控制理论)在许多方面都难以达到理想的控制效果。随着计算机控制技术和人工智能研究的发展,为粮食干燥的先进控制开拓了新的途径,其中模糊控制凭借其不依赖被控对象精确模型等特点引起了研究人员的广泛关注。中国农业大学毛志怀[2]在粮食干燥过程控制的研究现状与发展方向一文中提出可以将模糊控制应用于粮食干燥;哈尔滨工程大学孙书明[3]在其论文中阐述了一种基于模糊控制的连续式粮食干燥机控制系统的设计与实现;吉林大学赵波[4]设计了一种粮食干燥模糊控制系统,而运行试验表明其能有效稳定地实现控制等等。以上研究证明了模糊控制在粮食干燥机上应用的可行性以及优越性。而模糊PID控制综合了模糊控制和PID控制的特点,具有结构简单、鲁棒性强等优点 。但是,模糊PID控制器的参数选取一般采用试凑等方法,有一定局限性,很难达到最优状态[5]。本文基于模糊PID控制完成粮食干燥机控制器的设计,并利用遗传算法的全局优化能力和并行能力,对模糊PID控制器的量化因子和PID参数的修正系数进行优化,搜索以上参数的最优值,完成控制器的优化;通过控制仿真,与无参数优化的模糊PID控制以及常规PID控制进行比较分析,验证控制优化的有效性。
1 模型建立
1.1 粮食干燥机过程控制特点
(1)多变量
粮食干燥机过程控制是一个比较复杂的工业过程[6],不仅要考虑加工过程中粮食水分及温度,干燥介质温度、湿度及流量,以及外界气候条件等参数的影响,还要兼顾到粮食干燥机的工艺流程(如顺流、逆流、混流和横流等)。另外,一些干燥变量无法直接测量,即使可以测量,测量值也不够准确。
(2)非线性
粮食干燥是一种非线性过程[7],其非线性过程主要体现在干燥过程的降速阶段,干燥时间与粮食流量成反比,是一种非线性关系,当粮食流量较低时,排粮速度的扰动对系统的影响就会比较明显,容易造成控制的不稳定,这也是造成粮食过干或过湿的主要原因之一。
(3)大滞后
粮食干燥机过程控制系统的响应速度受谷物流速的影响,而粮食干燥时间一般较长(粮食在大型干燥机内滞留时间长达5~6 h)。因此系统的响应速度缓慢、且在干燥过程中交互作用严重,一个控制动作的改变会影响干燥机中的所有性能参数。
(4)强耦合
粮食干燥的各控制变量相互耦合,一个变量的改变会影响到其它变量,从而改变干燥条件,影响控制目标的实现。
1.2 粮食干燥机控制模型
综合考虑粮食干燥机过程控制特点以及便于系统仿真的需要,可以将粮食干燥机看作是一阶大滞后系统[8],其传递函数表达式为:

其中:0k为系统的开环放大倍数,T为惯性环节的时间参数,τ为滞后时间常数。根据粮食干燥机的特点,选择0k=2.21,T=210 s,τ=60 s。即粮食干燥系统被控对象的传递函数为:

2 基于遗传算法优化的模糊PID控制器的设计
2.1 粮食干燥机模糊PID控制
2.1.1 模糊PID控制原理
以PID控制方法为基础,运用模糊算法思想,把被控量的偏差e和偏差变化率ec作为模糊推理的输入变量,通过模糊算法规则整定PID的控制参数,构成了二维的模糊 PID控制器[9]。此方法将模糊控制的良好动态跟踪能力和PID控制的良好稳定性能结合起来,其原理见图1。
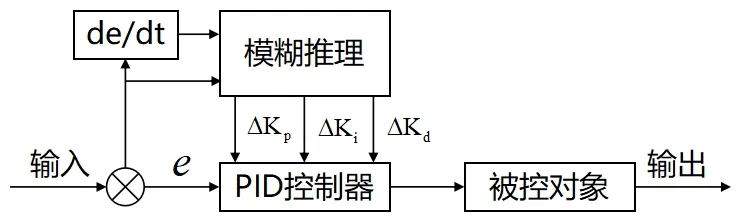
图1 模糊PID控制原理Fig.1 The principle of fuzzy PID control
将偏差e和偏差变化率ec作为控制器的输入,可以得到修正后的PID参数值:

式中: Kp, Ki, Kd为PID最终参数设定值;, Ki0, Kd0加为PID初始参数设定值; qkp,,为修正系数;ΔKp,ΔKi,ΔKd为模糊修正值。2.1.2 输入输出变量的确认与模糊化
根据模糊PID控制算法的原理与粮食干燥机控制系统的控制要求,选择控制水分的偏差值e与偏差变化率ec作为模糊控制器的输入变量,模糊修正值ΔKp,ΔKi,ΔKd作为模糊控制的输出变量。控制器输入输出变量的模糊论域均选为[-3,3],论域选择均为 7级,即模糊子集定义为[NB,NM,NS,ZE,PS,PM,PB],对应的量化因子分别为 Ke= 0 .6,Kec=0.2, Ku= 0 .9,对应的比例因子分别为各模糊子集隶属度函数在确定时综合考虑三角形、Z形以及S形,模糊推理方法选择Mamdani min-max法[10],具体隶属度函数见图2。
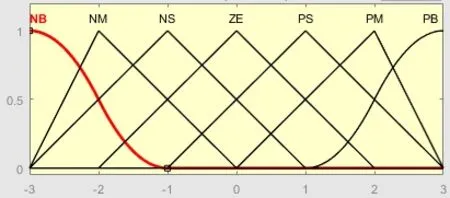
图2 隶属度函数Fig.2 Membership function
2.1.3 模糊控制规则与反模糊化
根据专家知识和操作者的经验,总结出的模糊控制规则如表1~3所示,同时选择重心法来进行反模糊化[11]。
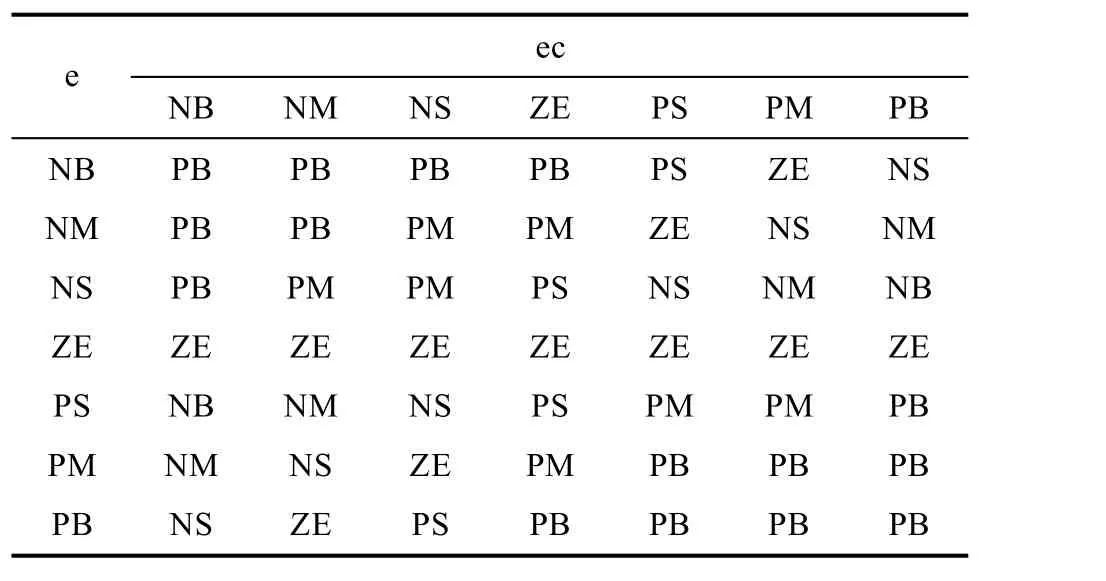
表1 pKΔ的模糊规则表Tab.1 Fuzzy reasoning table ofpKΔ
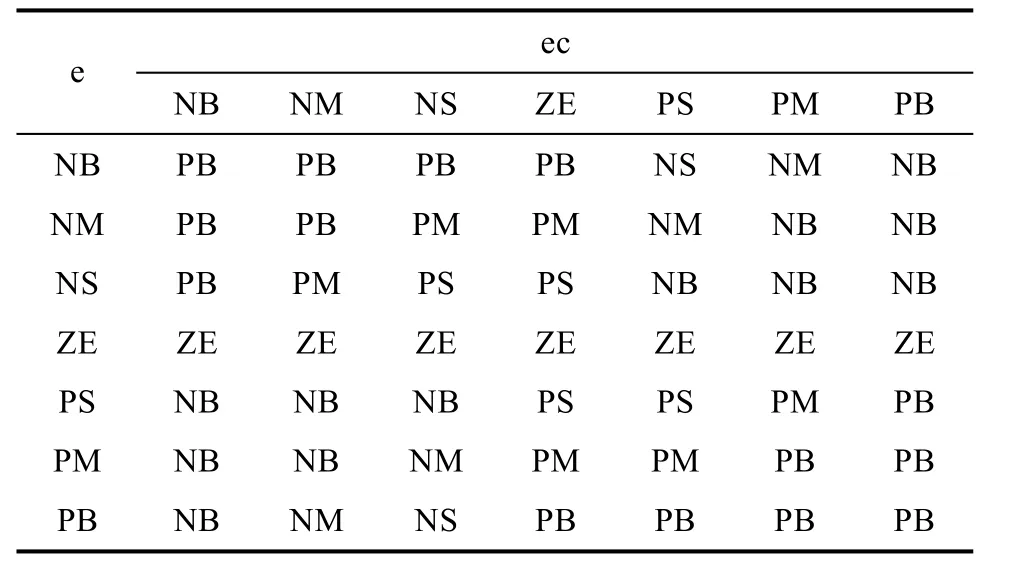
表2 ΔKi的模糊规则表Tab.2 Fuzzy reasoning table of ΔKi

表3 ΔKd的模糊规则表Tab.3 Fuzzy reasoning table of ΔKd
2.2 基于遗传算法的模糊PID控制器参数优化
经过公式计算所得的模糊PID控制器的量化因子与比例因子通常无法取得最优的控制效果,仍需要通过试凑法对其进行修改,本文中借助遗传算法对其参数进行优化。
2.2.1 控制器优化模型
本文选取模糊控制中的偏差 e、偏差变化率 ec以及控制量输出的量化因子 Ke、Kec、Ku和 PID控制器中的 3个修正系数pKΔ,iKΔ,dKΔ作为设计变量,每个设计变量的上、下限值如表4所示。
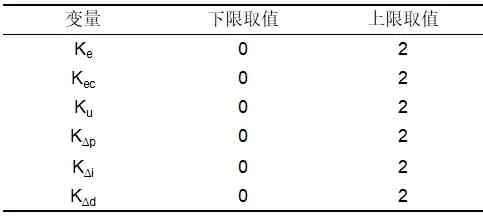
表4 设计变量的上、下限值Tab.4 Limits of design variables
2.2.2 目标函数选取
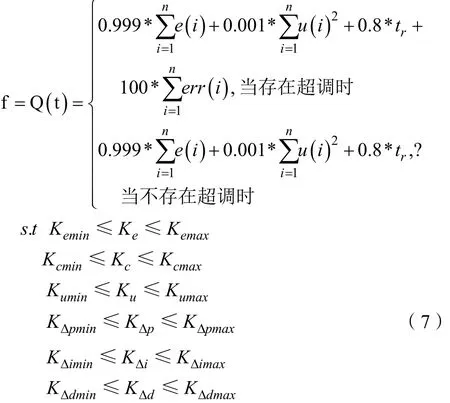
对于控制系统来说,其性能评价分为动态性能指标和稳态性能指标两类。其中,动态性能指标包括与系统响应速度相关的上升时间(rise time)tr、峰值时间(peak time)tp、调节时间(setting time)ts以及与系统阻尼程度相关的超调量(overshoot)σ%等;稳态性能指标包括与系统控制精度或抗扰动能力相关的稳态误差(steady-state error)ess等。本文基于其中的上升时间(rise time)tr、超调量(overshoot)σ%以及稳态误差(steady-state error)ess这三项性能指标来设计优化的目标函数。

式中: Q(t)为目标函数;n为系统仿真的采样点数;e为该时刻采样点对应的偏差值;u为该时刻控制量的输出值;tr为控制系统的上升时间;err为前一采样时刻与后一采样时刻的偏差值。
2.2.3 控制器的遗传优化算法
遗传算法是人工智能领域中解决最优化问题的一种高效的随机搜索算法,其通过选择运算、交叉运算、变异运算等操作,寻求一个对于种群有最大适应度的最优解[12]。
(1)染色体编码
将优化模型中的6个变量从左到右依次连接成编码串=(Ke,Kec,Ku,KpΔ,KiΔ,KdΔ),这样的编码串就代表种群中1个个体。每一个个体都是可行解,并根据表4产生初始种群。种群规模为50,并在迭代的过程中保持不变。
(2)适应度函数选择
选取之前确定的目标函数作为遗传算法有的的适应度函数,如式(7)所示。适应度越小,说明控制效果优良。
(3)选择、交叉和变异操作
若选择操作以较大的概率作用于种群,则适应度高的个体作为父代遗传到下一代的概率就高,综合考虑后选择将概率设定为0.9。
交叉操作是按照较大的概率作用于个体,把两个父代个体的部分结构加以替换重组,进而产生新个体,综合考虑后选择将交叉概率设定为0.8。
变异操作是以较小的概率改变个体的某些部位,生成新个体,综合考虑后选择将变异概率设定为0.02。
(4)终止条件
遗传算法不仅可以用最大迭代次数来限制程序运行,还可以用适应度函数来判断终止条件,综合考虑后选择用最大迭代次数作为优化的一个终止条件。当运行到指定的迭代次数时,遗传算法程序会自动停止,并输出最优解。最大迭代次数选择60。
在优化过程中调用遗传算法运行程序,整个优化程序的流程见图3。
在采用遗传算法优化控制器参数时将调用图 4模型。模型输出仿真过程中模糊PID控制器的输出和控制模型的系统输出,传递给遗传算法的优化主程序进行适应度值的计算。当达到优化控制条件时,得到适应度值变化曲线,见图5。
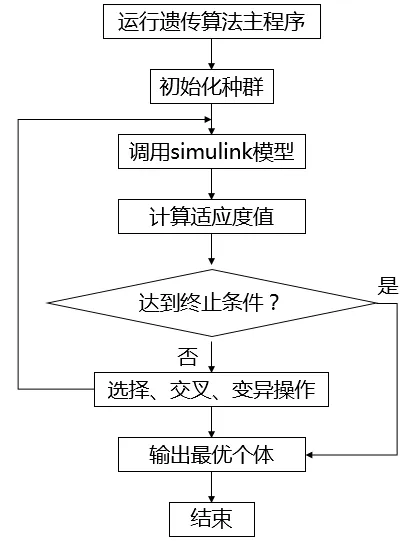
图3 遗传优化流程Fig.3 Process of genetic optimization
由图5可以看出:最优个体的适应度函数值不断减少,最终至 ,此时对应的最优个体为(Ke、Kc、(0.51,0.117,0.885,0.012,0.151,1.493)。
3 仿真结果分析
根据之前建立完成的模型和算法,以单位阶跃响应作为输入,在simulink中建立对应的模型进行仿真,将经过遗传算法优化过后的模糊PID控制与优化前的模糊 PID控制以及常规 PID控制进行比较,仿真结果如图 6。对以上三个控制系统的超调量,调节时间以及稳态误差进行计算,结果见表5。从表可以看出:经过遗传算法优化过后的模糊PID控制与优化前的模糊 PID控制以及常规 PID控制相比较,超调量、调节时间以及稳态误差均有减少。
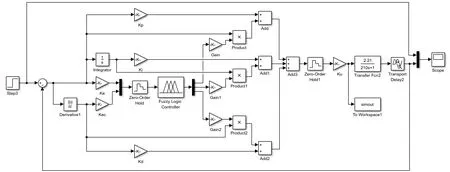
图4 遗传算法调用模型Fig.4 Invocation model of genetic optimization
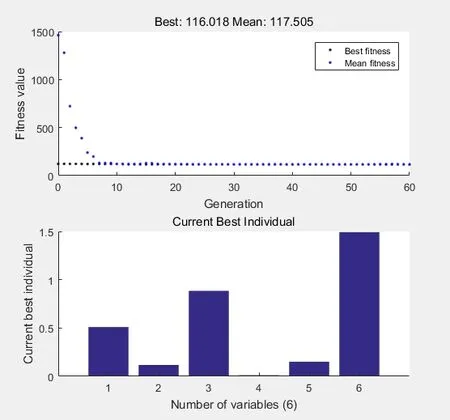
图5 遗传算法优化结果Fig.5 Optimization result of genetic optimization
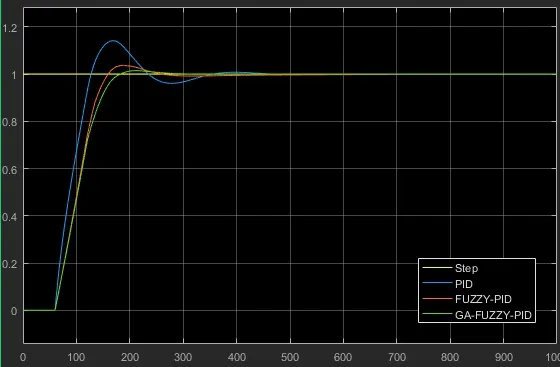
图6 单位阶跃响应控制效果比较Fig.6 Control effect comparison with unit step response

表5 单位阶跃响应仿真结果Tab.5 simulation result with unit step response
4 结论
本文给出了一种基于遗传算法优化的模糊 PID控制器的设计,其控制效果优于模糊PID控制以及常规PID控制,说明采用遗传算法优化模糊PID控制参数是有效的,克服了常规手动调整参数所带来的局限性。
优化后的超调量、调节时间以及稳态误差都有所降低,说明基于遗传算法优化的模糊PID控制器的控制性能优于模糊PID控制器以及常规PID控制器,能够较好地提高粮食干燥机的控制效果。
[2] 李国昉, 毛志怀. 粮食干燥过程控制的研究现状与发展方向[J]. 粮食与饲料工业, 2006, (4): 17-18. DOI: 10.3969/j.issn.1003-6202.2006.04.007.
[3] 孙书明. 连续式粮食干燥机控制系统研究[D]. 哈尔滨工程大学, 2008. DOI: 10.7666/d.y1437314.
[4] 赵波, 杨春晖, 王刚等. 基于模糊控制的粮食干燥机自动控制系统的研究[J]. 农业机械, 2011, (10): 109-111. DOI:10.3969/j.issn.1000-9868.2011.10.026.
[5] 赵强, 何法, 王鑫等. 基于遗传算法优化的车辆主动悬架模糊PID控制[J]. 重庆理工大学学报(自然科学版), 2016,30(2): 6-11. DOI: 10.3969/j.issn.1674-8425(z).2016.02.002.
[6] 曹崇文, 汪喜波. 粮食干燥机的自动控制[J]. 现代化农业,2002, (2): 40-44. DOI: 10.3969/j.issn.1001-0254.2002.02.005.
[7] 代爱妮, 周晓光, 刘景云等. 粮食干燥过程的控制方案研究及特点分析[C]. //第15届全国干燥技术交流会论文集.2015: 354-359.
[8] 王垚, 王长春. 基于模糊PID技术的振动式谷物烘干机温度和水分控制系统的研究[J]. 中国农机化, 2006, (1):71-73. DOI: 10. 3969/j.issn.1006-7205.2006.01.023.
[9] SANGYONGMOON, WOOKHYUNKWON. Genetic-based fuzzy control for half-car active suspension systems[J].International Journal of Systems Science, 1998, 29(7): 699-710.
[10] 徐兵, 程旭德, 王宏利等. 基于Matlab的Mamdani与Sugeno型模糊推理研究[J]. 计算机应用, 2006, 26(z2):223-224.
[11] 刘斌, 尹晓峰, 丁珠玉等. 模糊 PID 在油菜籽热风干燥控制系统的研究[J]. 西南师范大学学报(自然科学版),2016, 41(4): 109-114. DOI: 10.13718/j.cnki.xsxb.2016.04.020.
[12] 葛继科, 邱玉辉, 吴春明等. 遗传算法研究综述[J]. 计算机应用研究, 2008, 25(10): 2911-2916. DOI: 10. 3969/j.issn.1001-3695.2008.10.008.
Application of Fuzzy PID Control Based on Genetic Algorithm in Grain Drying
NIE Fang, ZHOU Xiao-guang, DAI Ai-ni, XING Ying, WANG Hai-xia
(School of Automation, Beijing University of Posts and Telecommunications, Beijing 100876, China)
Aiming at the problem of the unsatisfactory control effect when traditional control algorithm was used in a grain dryer control system, a fuzzy PID control algorithm based on a genetic optimization algorithm was designed to implement the automatic control of grain dryer. The algorithm combines the advantages of fuzzy control and PID control, and uses the global optimization ability and parallel processing capability of genetic algorithm to optimize the quantification factors of fuzzy PID controller and the correction factors of PID parameters, and realizes the optimal control. The objective function which contains adjustment time, overshoot and steady state error of the control system was set up by using dynamic and steady state performance indexes of control system as comprehensive assessment indexes. Based on the established objective function, the parameters of the fuzzy PID controller were optimized by the genetic algorithm and the control effect of the conventional PID control and the conventional fuzzy PID controller were improved. Finally, the simulation and comparison of control performance were carried out in Matlab, and the simulation results indicate that the control effect of the fuzzy PID controller optimized by genetic algorithm for a grain dryer is superior to that of the fuzzy PID controller without optimization and the conventional PID control. The control algorithm can provide an effectiveness reference for the actual control strategy of grain drying.
Control theory; Fuzzy PID control; Genetic algorithm; Grain drying; Matlab simulation
国家粮食公益性行业科研专项经费资助(项目编号:No. 201413006)
聂放(1993-),男,硕士研究生,主要研究方向:控制理论与应用;代爱妮(1977-),女,博士研究生,主要研究方向:智能控制,粮食干燥控制;邢颖(1978-),女,讲师、硕导,主要研究方向:软件测试、人工智能;王海霞(1991-),女,硕士研究生,主要研究方向:物流系统信息化及网络化。
周晓光(1957-),男,教授、博导,主要研究方向:自动化物流系统,物联网技术及其应用。
TP15
A
10.3969/j.issn.1003-6970.2017.12.007
本文著录格式:聂放,周晓光,代爱妮,等. 基于遗传算法优化的模糊PID控制在粮食干燥中的应用[J]. 软件,2017,38(12):37-41
10.7666/d.y705124.