汽车稳定性控制系统中的统一车速估计方法的研究
2018-01-02李臻
李 臻
(上汽通用东岳汽车有限公司,山东 烟台 264006)
汽车稳定性控制系统中的统一车速估计方法的研究
李 臻
(上汽通用东岳汽车有限公司,山东 烟台 264006)
当前车辆大部门都配备了ABS/ESP装置,这些装置起作用的关键信号就是车速,本文通过对车速的算法研究以及相关算法编程后的仿真研究(卡尔曼滤波算法),探索了自主稳定控制系统中的车速估计这一难题,为自主稳定控制提供了算法参考,为后续车速准确计算打下基础。
稳定性控制;统一车速估计;扩展卡尔曼
1 引言
目前市场上大部分车辆都标配了ESP系统(电控行驶平稳系统,Electronic Stability Program),相对于ABS和ASR系统,ESP系统可以很好的保证汽车的侧向稳定性,可以有效避免在雨水冰雪天气下产生的侧滑,大大降低车辆事故率,提高车辆安全性,对于当前车辆的状态的估计是ESP系统准确工作的前提,滑移率是车辆状态估计的重要的依据,要计算出准确的滑移率则需要准确计算车辆的速度,这就是我们探索车速估计算法的必要性和重要性。
2 基于非线性动力学模型的扩展卡尔曼滤波算法统一车速估计方法的初步研究
2.1 统一车速估计的模型
本文用于统一车速估计的系统为一非线性随机系统,具体推到过程此处省略,通过对系统状态方程的线性化和离散化,得出EKF的递推公式如下:

扩展卡尔曼滤波递推算法估计车速时,将初值设为:

2.2 实验仿真
所有仿真图中,虚线为估计值,实线为真实值。
2.2.1 标准双移线工况仿真分析
仿真条件:标准双移线工况下,初始速度v=23m/s,方向盘转角delta=0.05弧度,路面摩擦系数friction=0.8,仿真结果如图1至图2所示。

图1 纵向统一车速估计
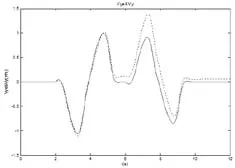
图2 侧向统一车速估计
仿真结果:标准双移线工况对于车辆车速的估计比较困难。由上图可知,纵向车速的估计误差在1m/s左右,相对误差较大;估计侧向车速的估计能够准确的跟上侧向实际车速,比较理想。
2.2.2 方向盘角阶跃工况仿真分析
仿真条件:角阶跃工况下,初始速度v=23m/s,方向盘转角
delta=0.05弧度,路面摩擦系数friction=0.8,仿真结果如图3至4所示:
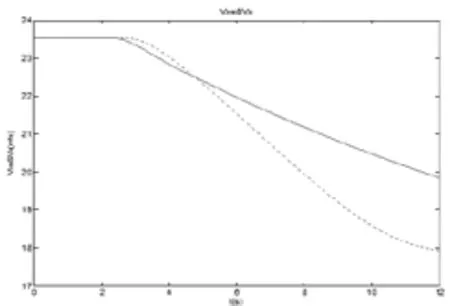
图3 纵向统一车速估计
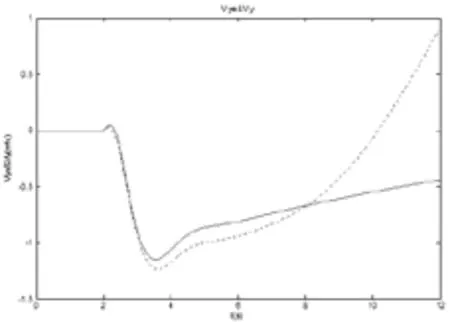
图4 侧向统一车速估计
仿真结果:方向盘角阶跃工况属于恶劣的车辆工况,对于该工况的车速估计比较困难也很重要,由上图可知,纵向车速估计误差由大到小,最后完全贴合实际车速;侧向车速的估计则完全相反,误差由小到大,相关参数还需要调整。
2.2.3 制动工况仿真分析
仿真条件:制动工况下,初始速度v=35m/s,制动力矩tb=450路面摩擦系数friction=0.8。仿真结果如图5至6所示:
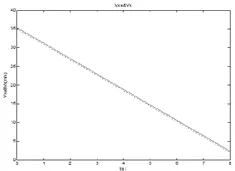
图5 纵向统一车速估计
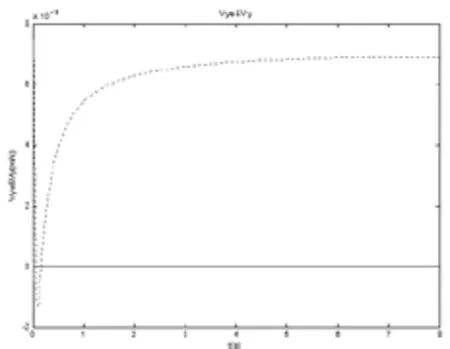
图6 侧向统一车速估计
仿真结果:由于制动工况下,方向盘没有摆动,侧向没有加速度,对于车速估计相对简单。由上图可知,纵向和侧向车速的估计误差非常小,效果较好。
3 总结
本文利用扩展卡尔曼滤波算法,通过模型推导、matlab编程,实现了对标准双移线、方向盘角阶跃和制动工况下的车辆速度进行了估计,从程序仿真结果看,对于双移线工况的纵向车速和角阶跃工况的横向车速估计不是很准确,希望后面可以调整相关参数以期达到良好的效果。
[1]刘训忠等.汽车防抱制动系统(ABS)的轮速算法研究[J].汽车电器,2000(01).
[2]历朴等.ABS轮速信号抗干扰处理方法汽车技术[J].2001(05).
[3]吴伟先.国产ESP开发技术研究——基于压力函数的控制逻辑分析[D]-广州:华南理工大学交通学院,2003.
10.16640/j.cnki.37-1222/t.2018.01.027
