基于OpenWRT的无线小车设计
2017-12-29徐广允
摘 要:现阶段,企业生产水平不断提高,生产技术面临着不断的挑战,自动化水平的要求也在步步攀升。在这一大环境下,人工智能的发展成为了科技发展及多领域需求的焦点,无线小车作为其中的一员在自动化水平的提升及实际生产过程中均扮演着越来越重要的角色。文章围绕无线小车的设计为核心展开论述,基于OpenWRT系统,对小车的整体设计、硬件系统设计及软件系统设计展开探讨,并提出了相应的一些方案。
关键词:OpenWRT系统;无线小车;软件;设计
DOI:10.16640/j.cnki.37-1222/t.2017.24.118
近年来,随着科技的发展与进步,人工智能逐步渗透生活中的方方面面,在多个领域内发挥着重要作用,无线小车即是其中之一。本文中以无线小车为设计对象,采用OpenWRT操作系统进行设计,其基本功能是通过无线网络,控制小车运动,同时小车上的图像采集系统可实现对实时画面的传送,从理论角度说,其功能性还可以根据不同的需求加以扩展。
1 总体设计方案
本设计中的智能小车属轮式移动机器人,其优势在于结构简单,控制便捷,在室内地面或较为平坦的环境下可进行较好地工作。在对智能小车进行设计时,需就小车的三个设计方向加以考量,即传感器系统设计、模式操作设计与基于OpenWRT的无线通信系统设计。在传感器系统设计中,旨在实现小车的远程控制,包括障碍物检测、速度检测等目标;模式操作设计较为整体,关系到小车运行的方方面面;而无线通讯系统设计,则是基于OpenWRT系统下,搭建无线通信系统,实现对小车的远程通讯。
2 系统硬件设计
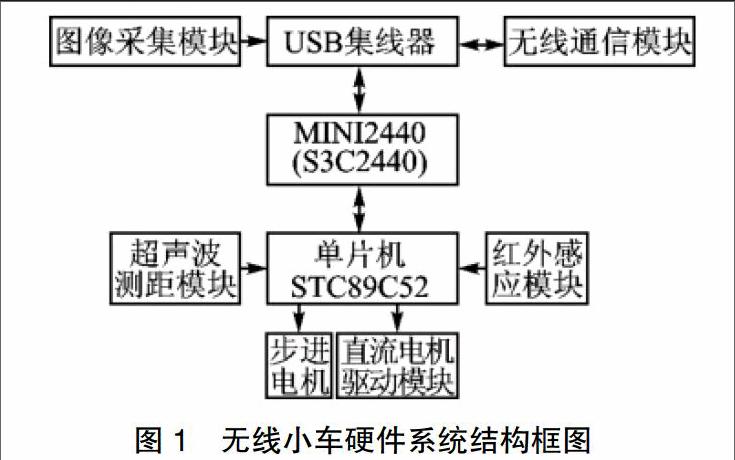
如上图所示,硬件系统模块主要包括直流电驱动系统模块、图像采集模块、超声波测距模块、无线通信模块、红外感应模块等。具体来说,小车硬件系统的主要构建有单片机、ARM处理器、外围电路、电源等。本设计中,小车采用两层架构,其中,上层核心为ARM处理器,其主板采用MINI2440作为其主板,主要功能是采集图像,并通过无线网络将图像将图像传送至远端机器;下层核心为单片机,本设计中采用51单片机,与外围电路共同组成单片机控制系统,主要作用于两方面,分别是小车移动的控制和传感器数据的处理。
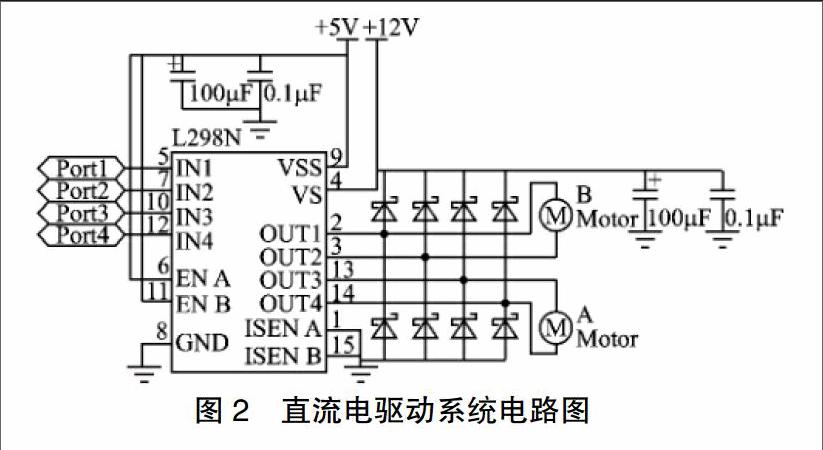
直流电驱动系统电路如上图所示,在直流电驱动系统模块中,小车的核心构件为L298N芯片,就其自身而言,优势在于带载能力强;而外围电路的重要构件为二极管,将由二极管构成的电桥电路与电机并联,实现对电机的控制与其预定的运转。
本设计中,小车的控制方案为H桥控制方案,对小车左右轮驱动的控制依赖于电机4路PWM的输出,2路PWM输出即可对一个电机进行控制,两电机之间以并联方式相联。信号ENABLE的高低将直接影响输出的变化,只有直流电驱动系统芯片使得ENABLE信号为高,才能使得输出随输入变化,否则将处于高阻态。因此,在进行焊接过程中,应将电源引脚与ENABLE引脚VS均接电源VCC。
3 软件系统设计
本設计中选用OpenWRT操作系统,属嵌入式Linux系统,其优势在于OpenWRT支持各种处理器架构,无论是对ARM,X86,PowerPC或者MIPS都有很好的支持。其多达3000多种软件包,囊括从工具链(toolchain),到内核(linux kernel),到软件包(packages),再到根文件系统(rootfs)整个体系,使得用户只需简单的一个make命令即可方便快速地定制一个具有特定功能的嵌入式系统来制作固件。
本设计中小车的操作程序编写在Kubuntu CodeBlock IDE集成开发环境中进行,并将编译出的代码再经ARM eabi较差编译工具再编译,再由中断经由串行口向移动终端烧入交叉编译后的系统及程序。在通信方面,主机端利用vsftp软件进行FTP服务器假设,并以无线网卡实现无线局域网建立。在驱动系统方面,可根据MINI2440开发板现有的例程结合小车功能硬件及功能需要进行改写,编译后输入内核。在摄像控制方面,其软件mjpg-streamer由OpenWRT提供,为软件包形式,用法比较简单,参数直接写在命令行中,通过8080端口输出为MJPEG格式图像。本设计中通过Putty进行指令操作,其代码如下:
mjpg_streamer -i "input_uvc.so -d /dev/video0" -o "output_http.so -p 8080 -w /www/camwww"。
4 结语
综上所述,为了适应社会生产发展需要,在科学技术发展的推动下,人工智能逐渐崭露头角,并在多个领域中扮演着越来越重要的角色。文章以无线小车的设计为核心展开探讨,着重对其总体设计、硬件系统设计及软件系统设计展开阐述,提出相应的设计方案。
参考文献:
[1]滕泓虬.基于OpenWrt的移动机器人系统设计[J].单片机与嵌入式系统应用,2012,12(01):50-52.
[2]喻涛.基于无线控制模式的智能小车设计[D].南京理工大学,2015.
作者简介:徐广允(1984-),男,云南宣威人,本科,工学学士,讲师,研究方向:自动化。