高压隔离开关电机操动机构控制系统
2017-12-29张灿
张灿
摘 要:为了智能操作高压隔离开关,操作期间应有效控制开关触头的速度,在原有高压断路器操作控制系统的基础上设计高压隔离开关无刷直流电机调速系统,利用双闭环PID控制措施,调节电机的绕组电流与转速,确保触头可以在规定时间内达到特定速度,从而达到分闸的速度要求,保障高压隔离开关在操作期间可以实时调节速度,稳定有效的运行。
关键词:高压隔离开关;电机操动机构;控制系统
DOI:10.16640/j.cnki.37-1222/t.2017.24.002
对高压隔离开关而言,要求操动机构响应快、具有较高的输出扭矩。现有的电机运行机构大多需要一整套机械减速元件,多个部件,传动机构复杂,可靠性低,运动过程不可控。因此,有必要设计一种输出转矩大、传动机构简单可靠、运动末端冲击小的驱动电机直接驱动隔离开关。提出了电机驱动机构的设计方法,分析了真空断路器传动机构的运动特性,确定了驱动机构驱动电机的设计要求。
1 电机操动机构及控制技术现状
1.1 电机操动机构研究现状
在高压开关设备中,电机操动机构的结构较为简单,响应速度较快,便于操控,因此得到了广泛使用。当前国内外科研机构及高校均对电机操动机构进行了大量研究,比如2002年,ABB公司在大电网会议报告中便明确指出电动操动机构与以往的弹簧机构及液压弹簧操动机构存在较大区别,电动操动机构的结构更为简单,且具备较强的稳定性。而在储能方面,相较弹簧机构的压缩弹簧及气动机构的压缩气体,电机操动机构的储能方式较为简单,且操作方便。且在运行原理方面,电机操动机构主要通过通电线圈产生驱动力,利用线圈内电流的改变产生动力,以驱动机构运行,且更易操控。以上特点均决定了在高压开关设备中,电动操动机构的应用必将成为未来的主流发展趋势。
在国内,相关高校也在隔离开关电机操动机构领域进行了深入研究,积累了一定经验,设计并发明了永磁同步直线电机、永磁无刷直流电机等结构。2012年,清华大学黄瑜珑教授针对单相断路器进行了深入研究,并设计了新型的电机驱动操动机构,这种操动机构与以往技术不同,需要正反向转动旋转电机及拐臂,通过转动曲轴带动高压器进行分合闸运动,有效解决了以往技术中高压断路器使用寿命短且工作可靠性差等问题。近年来,在断路器中开始广泛使用电机操动机构,但在隔离开关配电机操动机构方面的相关研究却并不成熟,驱动电机、电器控制元件以及两级涡轮减速器均属于隔离开关电机操动机构的主要组成部分,其中第一级与第二级的涡轮减速器为高压隔离开关电机提供运转动力,由输出轴传递至隔离开关,但当前并未实现直接由驱动电机带动触头实现分合闸动作。
1.2 电机操动机构控制技术研究现状
高压隔离开关电机操动机构的运行动作速度较快,且运行期间驱动电机一直处于启动模式。清华大学黄瑜珑教授针对永磁同步电动机操动机构提出了双闭环矢量控制系统,并得出了仿真计算与试验测量结果。而山东大学李庆民教授建立了永磁同步电机操动结构的动态数学模型,分析了拐臂的初始位置角,并指出了相应的取值范围。主要通过最优二次型学习算法的单神经元PID速度控制器对分闸运动进行跟踪,但研究过程并未给出对比曲线,也未综合考虑整个电网,因此研究尚处于理论研究阶段。
上述电机操动机构控制技术的相关研究依然处于仿真分析阶段,实验实用性较差。在实际应用过程中,电机操动机构应根据实际工作情况调整操动机构的运行条件,且还应加深对操动机构驱动隔离开关动触头运行的研究,并在隔离开关的关合操作中验证控制系统的有效性。
2 无刷直流电机操动机构可控性
分析数学模型可知,开关触头运动过程中应在两相绕组两端增加可变电压,进而可以实时控制电机速度,文章中主要利用脉宽调制技术获得可变电压。无刷直流电机可以为隔离开关提供驱动力,通过改变脉宽调制占空比调整触头运行速度,且占空比例越大,电机转速越大,反之,则比例越小,则转速越小。由此可知,改变脉宽调制的占空比可以有效控制电机转速,确保触头在行程内达到既定的速度要求[1]。
3 隔离开关操动机构及调速系统
3.1 无刷直流电机的操动机构
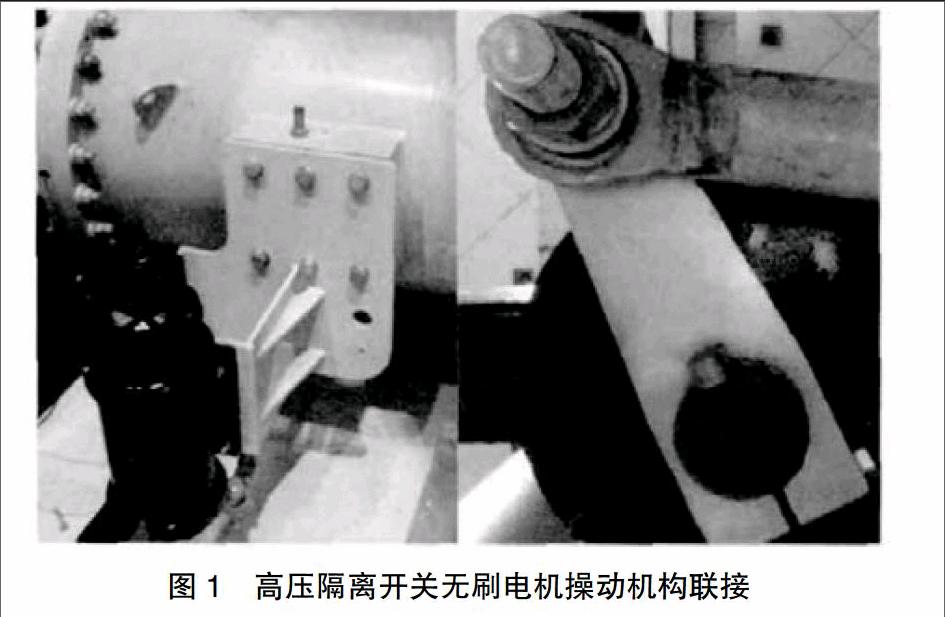
本文主要将550kV配电机操动机构隔离开关作为研究对象,其实物图如图1所示。
隔离开关的操动机构主要是带有限位器的无刷直流电机,它主要通过开关触头进行分合操作,改善了以往的液压、气动以及弹簧技术,具备结构复杂且连杆多等特点。
3.2 隔离开关电机机构控制系统
本系统的核心控制模块为数字信号处理器,且系统还包括检测电路、绕组线圈电流检测电路、电容充放电控制电路等模块系统。
一是设计分合闸隔离驱动控制电路,利用功率开关器件控制三相绕组电流,并设定开關轨迹,从而有效控制瞬态过压,降低开关器件的能耗,确保元器件的安全稳定运行。在关闭功率开关器件后,电容通过二极管充电,并有效吸收关闭期间产生的du/dt;而在开通功率开关器件后,则通过电阻R放电。但期间必须选用额定电流大于主电路期间额定电流十分之一的快速恢复二极管,且尽量减小线路电感,选择高频且性能较佳的吸收电容。
二是设计电机位置的检测电路,位置检测电路可以测量转子磁极的相对位置,通过正确的换相信息有效控制定子绕组换相。在本控制系统中,电机位置的检测传感器为三个固定在霍尔盘上的霍尔元件,利用圆形磁钢模拟电机磁场。电机运动时,磁钢也会随之旋转,进而霍尔元件的输出电平也会发生变化,从而通过输出信号明确电机转子位置。
三是设计速度检测电路,将光电耦合开关与遮光盘组成光电旋转
(下转第3页)
(上接第4页)
编码器,利用其检测转子速度。其中,每个光电耦合开关由红外发光二极管以及光敏三极管组成,且呈圆周式的均匀分布。[2]遮光盘上开有一定的窗口,且其位于发光二极管以及光敏三极管之间。运行期间,红外发光二极管会发出红外光,且遮光盘转动时,光敏三极管会不断的导通截止红外光,通过测量输出信号则可知转子速度。endprint
四是设计绕组线圈电流检测电路,以往检测电路利用分压电阻方式,电阻随着温度的变化会出现一定误差,无法确保测量的精确度。且外部电路与控制电路之间缺少电气隔离,很容易对控制电路出现高强度冲击,进而影响了控制系统运行的安全性。对此,检测电路电流时可以采用电气隔离的霍尔电流传感器,其正常运行期间,电机绕组为交变电流,但由于A/D模块输入电压为0至3.3伏,因此,应通过加法器控制传感器输出信号,并经过比例运算后确保线圈电流信号的安全性。
五是设计电容充放电控制电路,无刷直流电机摒弃了以往利用弹簧储能方式,采用储能电容,且设置了电容的充放电控制回路。且数字信号处理器采集电容信号,达到操作要求后,其发出信号,以停止充电。
4 控制策略
文章设计的隔离开关电机操动系统采用了双闭环控制模式,外环为速度环,而内环则为电流环,且均采用PID控制算法。在隔离开关触头运功时,电机实际信号测量值与参照值之间存在误差,之后在进入PID控制器,在外环速度调节后,将输出信号导入PID控制器中,通过调整脉宽调制占空比控制电机速度[3]。
5 试验结果分析
为了确保此控制系统的有效性,本文通过实验平台进行了调速测试,且DS开关触头开距为(172±2)毫米,超行程为(58±2)毫米,电机转角度為80度,且环境温度为25摄氏度,电容电压为35伏,电容容量为19800微法。测试所得隔离开关合闸操作时间为(220±5)ms,电机转动量为(80±2)度,且调速动作与行程误差保持在3度内,触头速度的提升效果十分明显。
而在隔离开关分闸行程方面,电机转动量为(80±2)度,分闸操作时间为(280±5)ms,开始时,电机以75%脉宽调制的占空比运行,而转动转子角度为15度时,电机以90%脉宽调制占空比运行,且完成了合闸操作。同时,触头动作与行程误差保持在2度以内,在控制调速后,触头速度得到了显著提升。
6 结束语
本文改善了隔离开关操动机构电机系统,并进行了试验分析,得到如下结论:
(1)提出了隔离开关电机操动机构的控制技术,并将其与高压电器技术与电机控制系统进行有效结合,有效控制了隔离开关机构的操动过程,且在调试验证后,发现此方案具备可行性。
(2)利用调速控制系统可以使隔离开关触头在特定行程段达到既定的速度要求,满足了技术需求。
(3)无刷直流电机操动机构可以驱动隔离开关,实现了智能化操作,为隔离开关操动机构提供了更为先进的平台技术。
参考文献:
[1]陈富国,何大伟,周瑞敏,邓冠男.550kV高压隔离开关电机驱动智能控制系统[J].仪表技术与传感器,2017(04).
[2]刘爱民,吴志恒,徐建源,史可鉴,汤庚.高压隔离开关触头运动智能控制策略研究(优先出版)[J].组合机床与自动化加工技术,2014(07).
[3]张志富,潘翔,陈恒松,洪云凤,黄贤龙.户外高压隔离开关操动机构定位安装系统研制[J].电气技术,2016(04).endprint