基于主成分特征向量系数的交通标志识别方法研究*
2017-12-29邹柏贤
邹柏贤,苗 军,孟 斌
(1.北京联合大学 应用文理学院,北京 1000191; 2.北京信息科技大学 计算机学院,北京 100101)
基于主成分特征向量系数的交通标志识别方法研究*
邹柏贤1,苗 军2,孟 斌1
(1.北京联合大学 应用文理学院,北京1000191;2.北京信息科技大学 计算机学院,北京100101)
对交通标志的识别研究一直是模式识别领域的研究热点。提出一种利用主成分特征向量系数和最近邻分类识别交通标志的方法,经验证取得较好的识别效果;同时,还研究探讨了交通标志图像的分辨率大小、主成分特征个数对正确识别率的影响。该方法的特点是交通标志图像来自真实环境,减小了计算量。
交通标志图像;主成分特征向量系数;正确识别率
0 引言
交通标志识别在车辆自动驾驶系统中具有重要意义。随着道路上车流量的增加以及气候条件、交通环境的日趋复杂,交通安全和拥堵已经成为日益严重的社会问题。为提高交通安全性,协助解决车辆驾驶中的问题,国内外学者一直在研究、探索道路交通标志的识别。因为交通标志和道路交通的复杂性,很难有固定的方法实现交通标志的自动识别,交通标志识别技术的发展还比较缓慢。目前虽在交通标志的识别方面已经取得了积极的成果,但是从总体来看,仍然存在一些不足:(1)识别对象单一化。多数工作是以计算机仿真的交通标志代替实际交通标志进行识别研究,处理比较简单,这种方法在识别现实中复杂环境下的交通标志图像时存在不足[1];(2)较复杂的识别过程和方法以及各国的交通标志复杂多样,使得识别的难度增加。
本文求出真实背景下交通标志图像的主成分特征向量,以主成分特征向量的系数组成的向量作为描述交通标志图像的特征,然后根据欧氏距离最近原则进行交通标志的识别。同时通过比较不同分辨率的交通标志图像、不同的主成分特征个数与识别率之间的关系对识别方法展开研究。这里的特征向量提取方法不同于一般的主成分分析特征提取方法。
1 相关研究工作
交通标志的识别是智能交通系统研究领域尚未解决的难题之一,也是难度较大的实景图形识别问题之一[2]。技术难点主要有:客观因素复杂多变,交通标志图像容易模糊、变形或失真严重,容易被遮挡。
感兴趣区域的获取通常是利用交通标志的颜色和几何形状信息来实现的。最常用的方法是对图像进行边缘检测后通过标志的几何形状特征检测交通标志的位置。文献[3]提出利用方向梯度直方图特征和k个决策树或随机森林方法进行交通标志的分类,引入空间加权机制改进k个决策树进行分类。文献[4]应用神经网络方法检测交通标志,根据直方图对观测图像进行排序,然后根据交通标志的边缘像素分割图像,通过霍夫变换方法检测圆形交通标志。文献[5]提出一种识别户外不同交通标志形状的算法,包括完成检测、形状识别的算法。文献[6]提出一种基于SVM和模糊免疫网络的交通标志图像识别方法,利用支持向量机检测和提取图像区域;再利用模糊免疫网络来识别交通标志。文献[7]根据图像特点的颜色及形状等外观特征,分三类交通标志(警告、禁令和指示)分别处理,检测出交通标志,应用自组织神经网络识别交通标志的类型。文献[8]根据我国交通标志的颜色和几何属性的对应关系,提取图像的颜色特征、轮廓特征以及不变矩特征,用概率神经网络识别交通标志。文献[9]运用基于Hough变换和特征优化的检测算法,利用驾驶辅助系统,通过检测交通标志,用交通标志的矩形外形、亮度两个特征检测交通标志。考虑到在实际中光照和气候条件的变化对交通标志图像的影响,文献[10]提出一种手视觉理论启发的特征提取方法,应用支持向量分类器识别交通标志。文献[11]运用HSV三分量阈值分离交通标志区域,对区域的形状进行仿射变换,提取Gabor特征向量,再利用支持向量机识别交通标志。文献[12]提出一种利用全局描述特征应用于交通标志识别中。
2 基于主成分特征向量系数的交通标志识别方法
为避免对大量已有样本进行学习,减小主成分特征提取计算量,本文采用一种新的特征提取和匹配方法,运用类似于主元分析方法[13],对每幅交通标志样本图像对应的二维矩阵,求出其标准正交基,这组标准正交基的特点是两两相互正交,去相关性好,能达到消除数据冗余和噪声的效果,且都为单位长度向量。把每幅交通标志样本图像的一组标准正交基,按照特征值{λi}从大到小的排序,λ1>λ2>…>λn,取特征值{λi}对应的特征向量(记为 {αi}(i=1,2,…,n))的系数,将这一组基向量的系数按顺序组合成一个行向量α=[α1,α2,…,αn],以此向量代表原样本图像的特征。此外,根据特征值从大到小顺序,选取前面若干个特征值对应的基向量。把组合向量α=[α1,α2,…,αn]称作该交通标志样本图像的主成分特征系数向量。以两幅图像的主成分特征系数向量之间的欧氏距离代表这两幅图像之间的距离。
通过对训练样本图像的计算,同种类型交通标志图像的主成分特征系数向量之间的距离(称作内部距离)较小,不同种类型交通标志的样本图像之间则距离(称作外部距离)较大。依次类推,假定内部距离在一个实数区间[A,B]内。对于一个测试样本T,计算其到各种交通标志训练样本图像的主成分特征系数向量之间的距离。当某个距离达到最小,且该距离属于同种标志相应的内部距离区间时,将测试样本T判定为该种类型交通标志,若与实际相符,则该交通标志图像识别成功。
2.1 预处理
在北京市区街道真实交通环境下,在不同位置、不同时间、不同姿态采集到各种类型交通标志约100幅图像。为提高识别效果,对采集的原始图像的不同特点进行相应的处理,如直方图、分辨率、中心位置的调整。然后随机选择交通标识图像的一部分作为训练图像集,另一部分作为测试图像集。
2.2 提取样本图像的标准正交基向量
用方阵X=(xij)p×p表示交通标志图像的灰度分布,图像中列向量矩阵的协方差矩阵记为:Σ=(sij)p×p,其中,

求协方差矩阵Σ对应的特征值{λi}及特征向量{φi}。特征值{λi}按从大到小排列,取前m个,λ1≥λ2≥…≥λm>0,对应的{φi}重构正交矩阵K,其中的列向量{ai}是标准正交基向量(称作样本图像的标准正交基向量)。
2.3 主成分特征系数向量
通过方差累计贡献率G(n)确定n的取值。通常,当累积贡献率大于85%时,被认为能足够反映原来变量的信息,对应的n就是提取的前n个标准正交基向量{ai}(i=1,2,…,n),把它们按顺序组成的行向量α=[α1,α2,…,αn]即为主成分特征系数向量。在实际应用中,选择标准正交基向量的个数因不同情形而异。本文对标准正交基向量个数在1~30之间的30种情况,分别进行了比较和分析测试样本的识别效果。
2.4 最近邻分类
最近邻是分类器算法中最常用的一种模式识别方法。在本文方法中,对全部训练样本图像按照各种交通标志分类(标记),共10种交通标志,分为10类Ci(i=1,2,…,10)。在训练阶段,计算各种类型训练样本图像Ci内各图像对应的主成分特征系数向量之间的距离,得到10种类型交通标志样本图像的内部距离区间[Li,Ui];在测试阶段,分别计算交通标志测试图像T与Ci(i=1,2,…,10)中任一图像的主成分特征系数向量之间的距离dT,j,若dT,j为最小且(Lj≤dT,j≤Uj),(1≤j≤10),则判断测试图像T是第j类交通标志。
2.5 基于主成分特征向量系数的交通标志识别算法
基于主成分特征系数向量的交通标志识别算法如下:
输入:交通标志图像训练集S={s1,s2,…,sm};
㉕爱新觉罗·弘历:《寄畅园杂咏》,裴大中、倪咸生修,秦缃业等纂:《光绪无锡金匮县志》,《中国地方志集成·江苏府县志辑》第24册,第27页。
测试图像集T
交通标志图像分辨率k×k
主成分个数n(n≤k)
1:forS中的每一个sido
2:预处理si(i=1,2,…,m);
3:提取n个主成分αj=(aj1,aj2,…,ajK),(j=1,2,…,n);
4:得si的主成分特征向量的系数组成的向量βi=[α1,α2,…αj…,αn];
5:end for
7:计算βi、βi之间的欧氏距离;
8:end for
9:得到S中同一交通标志两幅图像si、sj对应的主成分特征系数向量βi、βi之间的距离范围[Li,Ui](i=1,2,…,10);
10:预处理测试图T;
11:计算交通标志测试图T的n个主成分,得到其主成分特征系数向量βT;
12:fori(i=1,2,…,10)
13:计算βT到上述同一交通标志不同图像的主成分特征系数向量的欧氏距离dT,i(i=1,2,…,10);
14:if(dT,j为最小) &(Lj≤dT,j≤Uj),(1≤j≤10)
15: then测试图T是第j种交通标志;
输出:测试图T是第j种交通标志。
3 实验
首先利用数码相机采集真实背景下的道路交通标志图像。现实环境中的车流、噪音、气候、光线等诸多复杂因素导致交通标志的图像会发生各种变化和失真,选择在不同时间、不同地理位置、不同姿态、不同距离的情况下,用普通数码相机分别进行实景拍摄。图1是选取采集的10种常见交通标志图像。由于客观环境的因素,这些交通标志在灰度、几何性质以及结构方面发生较大的变化,识别的难度也随之增大。

图1 采集所选取的10种交通标志图像
图2是实际采集的部分交通标志图像。各种交通标志中随机地选取6幅图作为学习图像样本集A,其余4幅图图像作为测试图像集B。

图2 实际采集的部分交通标志图像
把原始图像处理成大小分别为256×256、128×128、64×64,分别提取它们的主成分特征系数向量,用上述分类识别方法,对采集到的图像进行训练和测试。同时,对主成分个数在1~30之间的情况下的识别效果进行了比较和分析。定义:识别率=正确识别数/测试图像总数。
实验结果表明,当图像分辨率为256×256,提取前1个主成分时,识别率最高,达到93%;随着提取主成分个数(即选取的正交基向量个数)的增多,识别率呈现下降趋势(见图3);这是因为图像的主成分反映了图像中的主要信息或绝大部分信息,随着主成分的增多,主成分中含有的图像细节信息过多,这些细节信息并非交通标志的主要信息,反而使正确识别率降低。
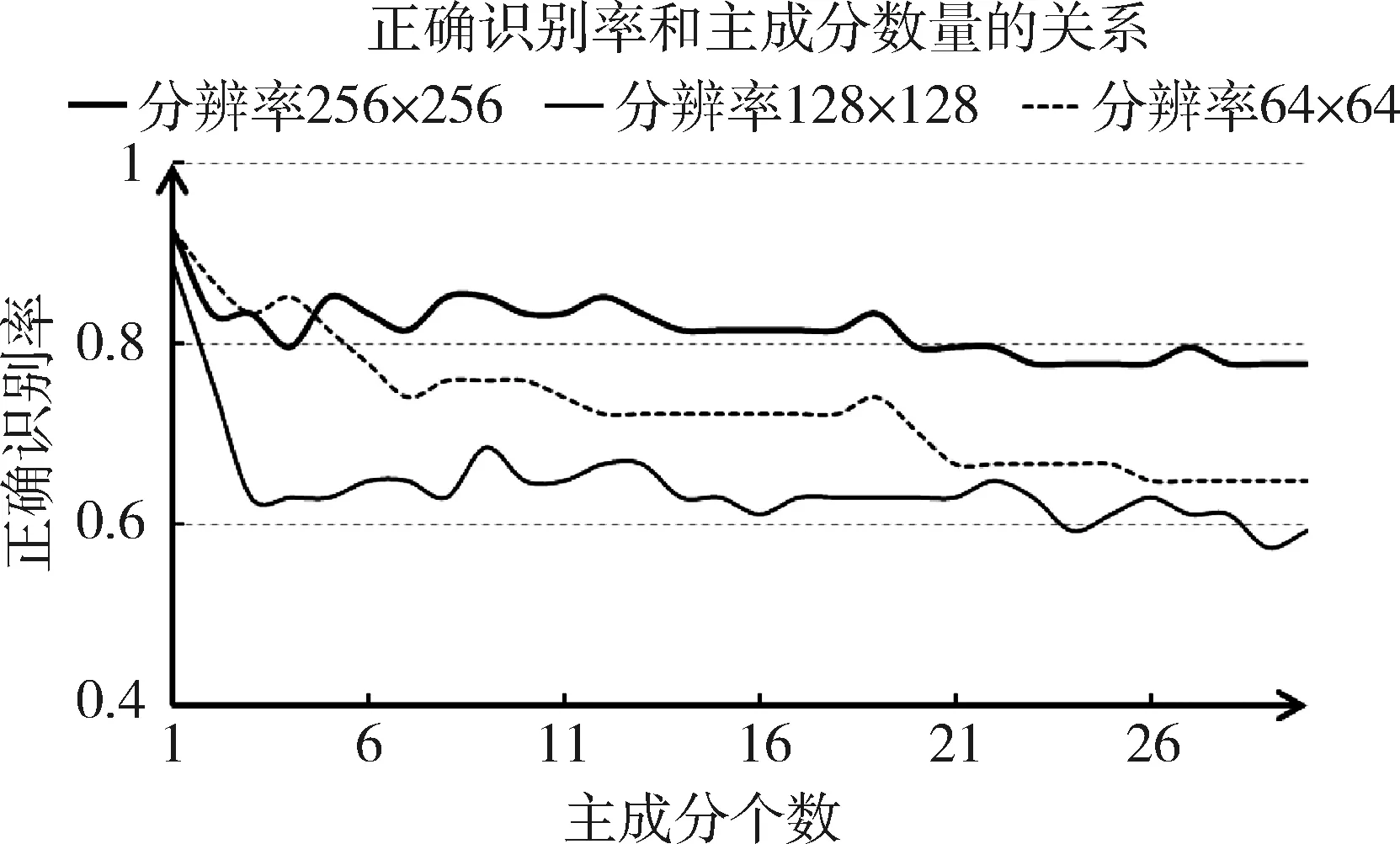
图3 图像分辨率、主成分特征个数与识别率的关系图
当图像分辨率为128×128,提取前1个主成分时,识别率最高,达到89%。随着提取主成分的个数增多,识别率呈现下降趋势;当图像分辨率为64×64,提取前1个主成分时,识别率最高,达到93%;随着提取主成分的个数增多,识别率同样呈现下降趋势。从整体情况看,分辨率256×256的识别效果好于其余两种分辨率低的情况。但是,分辨率为128×128时的识别率低于分辨率为64×64的情形。
由于在真实环境中的车流、噪音、气候、背景色等诸多复杂因素导致图像会发生各种变化。选择不同时间、位置、姿态进行实景拍摄时,会导致图像中交通标志的大小不一、图像的灰度值发生变化以及几何结构畸变等。另外,存在较为相似的交通标志,这些因素导致错误的识别产生。
4 结论
日益复杂的交通环境对交通标志的自动识别带来了更大的挑战。同时,从智能驾驶的角度看,解决这一问题日益迫切。现有研究主要集中在解决标准图像库以及对仿真标志图像的识别问题上。本文通过提取图像的标准正交基向量(主成分),并组合成主成分特征系数向量,识别真实背景下的交通标志,取得较好的识别效果。对实际采集图像的不同分辨率以及提取不同的主成分个数对正确识别率的影响分别进行了研究探讨。在实验中,当图像分辨率为256×256,提取前1个主成分时,识别率最高;随着提取主成分的个数增多,识别率呈现下降趋势;主成分反映了原始变量的绝大部分信息,然而,随着主成分数量的增多,获取的图像细节信息过多,它们在一定程度上掩盖了交通标志的主要信息。反而使正确识别率降低。从整体情况看,256×256分辨率的识别效果好于其余两种分辨率低的情况。但是,分辨率为128×128时的识别率低于分辨率为64×64的情形。另外,经测算,基于主成分特征的方法正确识别率不低于类似的识别方法,但减少了计算复杂量。在今后的研究中,还需要针对更复杂的环境,克服困难采集大量的交通标志图像,进行训练和测试,以进一步提高正确识别率。
[1] 杨守建,陈恳. 基于Hopfield神经网络的交通标志识别[J].计算机工程与科学,2011,33(8):132-137.
[2] 朱双东,陆晓峰. 道路交通标志识别的研究现状及展望[J].计算机工程与科学,2006,28(12): 50-52,102.
[3] ZAKLOUTA F,STANCIULESCU B. Real-time traffic-sign recognition using tree classifiers[J].IEEE Transactions on Intelligent Transportation Systems,2012,13(4):1507-1514.
[4] FISTREK T,LONCARIC S. Traffic sign detection and recognition using neural networks and histogram based selection of segmentation method[A]. IEEE Processing of ELMAR,2011: 51-54.
[5] 许少秋. 户外交通标志检测和形状识别[J].中国图象图形学报,2009,14(4):708-711.
[6] 罗晓萍,蒋加伏,唐贤瑛.基于SVM和模糊免疫网络的交通标志图像识别[J].计算机工程与设计,2006,27(9):1542-1544.
[7] 朱正平,孙传庆,王秀丽,等. 基于外观特征与神经网络的交通标志识别[J].自动化与仪器仪表,2009(1): 60-63.
[8] 孙光民,王晶,于光宇,等. 自然背景中交通标志的检测与识别[J].北京工业大学学报,2010,6(10): 1337-1343,1395.
[9] BAE G Y,HA J M,JEON J Y,et al. LED traffic sign detection using rectangular hough transform[C]. IEEE Conference Publications,2014 International Conference on Information Science and Applications(ICISA),2014:1-4.
[10] PARK J G,KIM K J. A method for feature extraction of traffic sign detection and the system for real world scene[C]. 2012 IEEE International Conference on Emerging Signal Processing Applications(ESPA),2012: 13-16.
[11] 陈亦欣,叶锋,肖锋,等. 基于HSV空间和形状特征的交通标志检测识别研究[J]. 江汉大学学报(自然科学版),2016,44(2):119-125.
[12] 胡月志,李娜,胡钊政,等. 基于ORB全局特征与最近邻的交通标志快速识别算法[J].交通信息与安全,2016,34(1):23-29.
[13] 蒋先刚.数字图像模式识别工程项目研究[M]. 成都:西南交通大学出版社,2014.
Study on traffic sign recognition based on principal component eigenvector coefficient
Zou Baixian1,Miao Jun2,Meng Bin1
(1. College of Applied Arts and Science,Beijing Union University,Beijing 100191,China;2. School of Computer Science,Beijing Information Science and Technology University,Beijing 100101,China)
The study on traffic sign recognition is always a research hotspot in the field of pattern recognition. A new method to recognize traffic signs using principal component eigenvector coefficient and the nearest neighbor classification was proposed. It was proved that the method has better recognition effect. The proposed method was simple and proved to be effective with traffic sign image in the real environment. Through experiments,the relationship between the resolution and the recognition rate of traffic sign images was discussed,and the relationship between the number of the principal components and the recognition rate was analyzed too. Reached a conclusion,when the resolution of the traffic sign image was 64×64,the recognition rate reached the maximum using one principal component feature.
traffic sign images; principal component eigenvector coefficient; correct recognition rate
国家自然科学基金项目(61650201,41671165);北京市自然科学基金项目(4162058)
TP391.41
A
10.19358/j.issn.1674-7720.2017.24.014
邹柏贤,苗军,孟斌.基于主成分特征向量系数的交通标志识别方法研究J.微型机与应用,2017,36(24):47-50.
2017-05-31)
邹柏贤(1966-),男,博士,副教授,CCF高级会员(E200025653S),主要研究方向:机器学习、图像处理。
苗军(1970-),男,博士,副教授,主要研究方向:人工智能、神经网络、图像理解。