水下控制模块对接盘对中锁紧机构设计
2017-12-29,,
, ,
(美钻能源科技(上海)有限公司, 上海 200943)
水下控制模块对接盘对中锁紧机构设计
梁斌,张鹏举,饶斌
(美钻能源科技(上海)有限公司,上海200943)
对水下控制模块(Subsea Control Module, SCM)的功能、结构和安装对接过程进行分析,设计一套利用机械死点的滑块连杆机构为工作原理的新型的水下控制模块对中锁紧机构,从而实现水下控制模块各个快插的连接,为采油树水下控制模块及相关产品的国产化开发应用积累了经验。
水下控制模块(SCM);对中;锁紧;解锁;机构设计
0 引 言
在海洋油气田 ( 特别是深水/超深水油气田) 的勘探开发过程中,石油、天然气的产量控制、分离处理和海底长距离输送等操作均通过水下生产系统完成,并在水下生产控制系统的控制下,实现从海底输送到海面依托设备或陆上终端设备。水下控制系统是水下生产系统的重要组成部分,为保证水下油气田的安全运行,须对水下生产控制系统进行安全有效的控制[1-4]。
水下控制模块(Subsea Control Module, SCM)是水下生产系统的控制核心部件之一,它根据水面发出的控制指令实现相应的水下监控。SCM安装在水下采油树等设备的水下控制模块基座(Subsea Control Module Mounting Base, SCMMB)上,SCM控制采油树上安装的液控闸阀和水面控制井下的安全阀,同时监控采油树上安装的生产或环空侧的压力传感器、压力温度传感器及井下压力温度传感器等。水下控制系统对接盘及其锁紧机构是水下控制系统的关键技术。目前国际主流的SCM,在水下安装过程中大都通过水下遥控机器人(Remotely Operated Vehicle, ROV)辅助,使用钢丝绳便能完成SCM的水下安装和取回。SCM须具备可回收和重复安装的功能,可通过水下控制系统对接盘的水下对接(SCM和SCMMB的水下对接)实现。对接盘对接完成后进行机械锁紧,即完成各类水下液压快插和水下电连接器的连接,以便更好地实现各个控制功能[5-7]。
本项目针对500 m水深水下控制系统的需求,突破深水环境下深水控制系统对接盘和锁紧机构的设计、制造、测试关键技术,完成500 m深水控制系统对接盘、锁紧机构工程样机的研制[8]。
1 总体结构设计
SCM采用的模块化设计以及整体安装、取回方式,使其成为一种可回收并且可以重复使用的独立单元设备,在深水中通过ROV的辅助将水下控制模块安装并锁紧到水下采油树等设备上。SCM设置有导向对中装置,便于SCM与SCMMB进行自动对中,同时可以有效防止出现多路液压/电气接头的错插。在SCM底部安装定位销的基础上增加引导装置,引导装置在对接盘对接前实现引导定位。
对接盘上安装有6个四通快插、3个回油液压快插、1套4芯湿式插拔电连接器、1套12芯湿式插拔电连接器,可以实现多路液压/电气接头的自动对中及锁紧。机械锁紧机构是SCM的关键部件:在运输过程中可以通过锁紧机构将SCM锁紧在运输框架上,在方便运输的同时降低底板上安装的各类液压和电气接头等重要零部件遭到损坏的可能性;在安装过程中,通过ROV给锁紧机构施加一个轴向力使液压/电气接头完全配合安装到位,实现多路液压/电气回路导通。对接盘锁紧机构总体结构如图1所示。

图1 对接盘锁紧机构总体结构

图2 上对接盘俯视图
上对接盘俯视图如图2所示,下对接盘俯视图如图3所示。上下对接盘上设置有两级导向机构,其中上对接盘外形结构与SCMMB的4根保护支架形成初级导向,而上对接盘导向杆与下对接盘上的导向筒形成精确导向,通过两级导向,能够确保上、下对接盘的良好对中。对中完成后,利用1套滑块连杆机构和机械死点完成锁紧。图1中的锁紧机构向简化图如图4所示。

图3 下对接盘俯视图 图4 锁紧机构简化图
锁紧机构自由度为
式中:活动件数n=3;低副个数P1=4;高副个数Ph=0;计算得自由度F=1,恰好等于原动件(提升芯轴)个数,即该机构运动状态稳定。
当主动件提升芯轴压到最低点时,此时左、右2个锁紧块平面恰好贴到下面板下端面,且两连杆处于共线状态,即呈180°,此时提升芯轴与连杆铰接点形成机械死点,即上、下对接盘除了原动件(提升芯轴)上下移动,在各类外力干扰下,仍可保持锁紧状态。
2 对接盘对接锁紧及对接过程
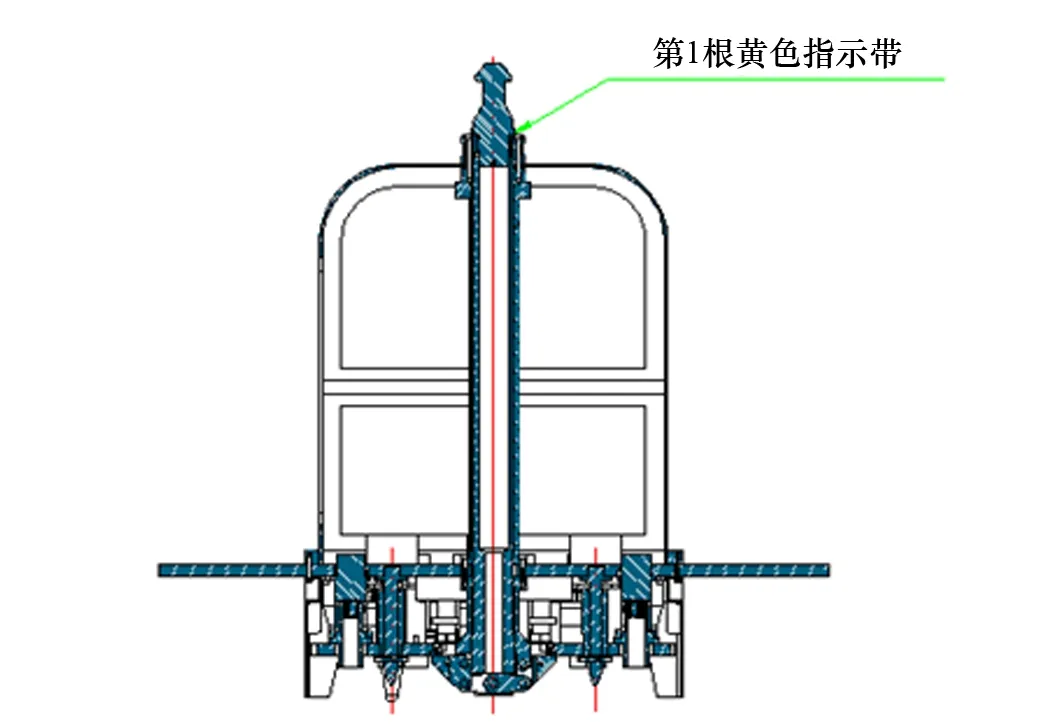
图5 对接盘锁紧状态
图6 锁紧机构状态指示带
图7 对接盘解锁状态
SCM正常安装锁紧到SCMMB上后,锁紧机构的作用力可以解决SCM受到ROV的意外碰撞导致液压/电气接头损伤的可能性。通过ROV提供反向的轴向力可以对锁紧机构进行解锁操作,以便从水下取回SCM,并能够最大化地保证水下生产控制系统的正常运行。上、下对接盘分别装配有液压/电气插拔连接器的各路公头和母头,通过锁紧机构上提升芯轴的上下轴向运动,实现上、下对接盘的锁紧与解锁,同时实现液压/电气接头的连接与脱开。
2.1 对接盘对接锁紧机理
SCM顶部为锁紧机构提升芯轴把手,通过螺纹与提升芯轴连接。提升芯轴下端通过销轴与3根连杆铰接,3根连杆以同样形式与左右一对锁块铰接。通过SCM多功能下入工具(Multi Purpose Running Tool, MPRT)对提升芯轴把手施加一个向下的力,将提升芯轴向下压紧,直至芯轴把手斜面与顶部导向筒的限位斜面相接触。此时,左右锁块撑起,两锁紧面呈180°,从而使锁紧块扣紧下对接盘底面,实现上、下对接盘的对接锁紧。对接盘对接锁紧过程如图5所示。
在整个机构整体垂直下降时(此时锁紧机构的两锁块处于收紧状态),上对接盘下端面的2个导向穿过下对接盘上的导向筒实现对中。在下对接盘中部有一矩形通孔,2个锁紧块也同时穿过此矩形通孔。液压四通快插相接,继续对提升芯轴施加压力,锁紧机构撑起锁紧块,并扣紧下对接盘,完成各个连接器的对接。
在提升芯轴把手设有上、下2条黄色指示带,分别指示整个机构处于锁紧和解锁状态,便于ROV观测对接盘状态,锁紧机构状态指示带,如图6所示。
2.2 对接盘解锁脱开机理
对接盘解锁脱开机理与锁紧机理相反,通过MPRT对提升芯轴把手施加1个向上的力,将提升芯轴把手向上提起,直至提升芯轴的斜面与芯轴套筒内的限位斜面相接触,此时2个锁紧块收回,两锁紧面相互平行,实现对接盘解锁。然后通过提升芯轴将整个对接盘提起,实现上、下对接盘脱开。在整个回收上升过程中,可从下对接盘的中心矩形孔收回对接盘锁紧机构,完成上、下对接盘的解锁。对接盘解锁状态如图7所示。
3 锁紧机构分析计算
3.1 锁紧与解锁操作力计算
水下对接盘锁紧机构总重为
式中:Nst为四通快插数量;Nyy为水下插拔式液压接头数量;Mst为四通快插重量;Myy为水下插拔式液压接头重量;Md4为4芯电气接头重量;Md12为12芯电气接头重量;Mds为对接盘、锁紧机构自身重量。
本文采用6个四通快插、3个液压快插、1个4芯电气接头、1个12芯电气接头。查阅产品手册可知:四通快插重量为Mst=19 kg;水下插拔式液压接头重量Myy=2.5 kg;4芯电气接头重量为Md4=3.9 kg;12芯电气接头重量为Md12=4.25 kg;对接盘锁紧机构自身重量为Mds=471.47 kg。因此,水下对接盘锁紧机构总重量为Mz=601.12 kg
一般情况(不考虑浮力、重力和非密封结构的密封)下,水下对接盘锁紧机构锁紧力为
式中:Nst为四通快插数量;Fcb为四通快插插拔力;Nyy为水下插拔式液压接头数量;Fyy为水下插拔式液压弹簧推力;F4为4芯电气接头插合力;F12为12芯电气接头插合力。
查阅产品手册可知:Fcb=618.481 N;Fyy=197 N;F4=400 N;F12=650 N。因此,水下对接盘锁紧机构锁紧力为Fsj=5.352 kN。考虑重力和浮力的作用,轴向力(向下)为
式中:Mz为水下对接盘、锁紧机构总重;g为重力;ρt为金属材料密度;ρs为水密度。
本文所选用金属材料的密度ρt=7.85×103kg/m3,因此轴向力(向下)为Fza=5.123 kN。考虑重力和浮力的作用,水下对接盘锁紧机构的锁紧力(下压力)为
式中:Fsj为锁紧解锁力;Fza为轴向力(向下)。
由式(5)可知:Fsja=229 N。考虑浮力和重力,水下对接盘最大解锁力为
式中:Nst为四通快插数量;Fcb为四通快插插拔力;Fza为轴向力(向下)。
由式(6)可知:Fza=5.123 kN;查阅数据手册可知Fcb=618.481 N。因此,水下对接盘最大锁紧力为Fjs=8.834 kN。水下对接盘、锁紧机构锁紧与解锁操作力为
式中:Fsj为水下对接盘、锁紧机构锁紧力;Fsja为水下对接盘、锁紧机构锁紧力(下压力);Fsj为水下对接盘最大解锁力。
水下对接盘锁紧机构锁紧与解锁操作力为Fcz=8.834 kN,满足设计要求。在四通阀体存在贴合力的情况下,四通快插瞬时拔出力为
式中:Fcb为四通快插插拔力;Fbtth为四通阀体贴合力。
查阅产品手册可知四通阀体贴合力Fbtth=1.410×104N,因此,Fbbt=1.472×104N。在密封压盖存在贴合力的情况下,四通快插瞬时拔出力为
式中:Fcb为四通快插插拔力;Fygth为密封压盖贴合力。
查阅产品手册可知:密封压盖贴合力Fygth=3.837×104N,因此在密封压盖存在贴合力的情况下,四通快插瞬时拔出力为Fbyg=3.900×104N。考虑非密封贴合面形成密封,在四通阀体存在贴合力的情况下,瞬时解锁力为
式中:Nst为四通快插数量;Fbbt为在四通阀体存在贴合力的情况下四通快插瞬时拔出力;Fza为轴向力(向下)。
查阅产品手册可知:在四通阀体存在贴合力的情况下,四通快插瞬时拔出力Fbbt=1.472×104N。因此,在四通阀体存在贴合力的情况下,瞬时解锁力为Fjsbt=93.443 kN。
在密封压盖存在贴合力的情况下,瞬时解锁力为
式中:Nst为四通快插数量;Fbyg为在密封压盖存在贴合力的情况下,四通快插瞬时拔出力;Fza为轴向力(向下)。
查阅产品手册可知:在密封压盖存在贴合力的情况下,四通快插瞬时拔出力Fbyg=3 900×104N。因此,在密封压盖存在贴合力的情况下,瞬时解锁力为Fjsyg=239.123 kN
通过以上计算分析,在非密封贴合面形成密封的情况下,水下对接盘锁紧机构均不满足锁紧、解锁操作力小于50 kN且应急解脱力小于80 kN的要求。因此,在水下使用的过程中,应严禁非密封贴合面形成密封(在贴合面未作处理的情况下,应避免在水下长期使用,导致贴合面紧密贴合)。非密封贴合面应做涂层,且表面粗糙度不易过高。
3.2 提升芯轴与提升芯轴把手提升能力计算
提升芯轴为整个锁紧机构的原动件,故整个锁紧及解锁均由且仅由提升芯轴提供动力,故有必要对其提升能力进行分析计算。由图1可知,提升芯轴与提升芯轴把手通过螺纹连接,螺纹承压面积为
式中:dts为螺纹外径;dts1为螺纹小径;Lts为啮合距离设计长度;pts为节距。
螺纹规格为M68-4.0;节距pts=4 mm。查表得:螺纹外径dts=68 mm;螺纹小径dts1=63.670 mm。其啮合距离设计长度Lts=35 mm。因此,可计算得出承压面积为Atsy=3.918×103mm2。螺纹抗剪面积为
式中:dts2为螺纹中径;Lts为啮合距离设计长度。
可查表得:螺纹中径dts2=65.402 mm。因此,计算出抗剪面积为Atsj=3.596×103mm2。螺纹等效面积为
式中:Atsy为承压面积;Atsj为抗剪面积。
计算得等效面积为Atsl=1.634×103mm2。提升芯轴危险截面面积为
式中:ODxz为提升芯轴外径;IDxz为提升芯轴小径。
根据设计尺寸可知:提升芯轴尺寸为ODxz=80 mm,IDxz=70 mm。计算得提升芯轴危险截面面积为Axz=1.178×103mm2。另外,根据实际应用工况及材料特性综合考虑,其许用应力为
式中:σtsy为材料屈服强度较低的最小屈服强度。
根据实际设计,提升芯轴及提升芯轴把手中,材料屈服强度较低的最小屈服强度为σtsy=207 MPa,故其许用应力为σts=138 MPa。提升芯轴最大允许的提升力为
式中:Atsl为等效面积;Axz为危险截面面积。
计算得出提升芯轴最大允许的提升力为Fts=162.6 kN。通过计算得到提升芯轴的尺寸满足设计要求。
4 结 论
本文提出水下控制模块对接盘对中锁紧机构的设计,阐述对接盘对中锁紧及解锁的工作原理,并针对锁紧机构提升能力进行分析及计算,得出如下结论:
(1) 对中锁紧机构的对中过程采用二级对中,精度较高,可实现上对接盘水下控制模块与下对接盘各类快插的良好对接。
(2) 对中锁紧机构采用自由度为1的滑块连杆机构,仅可通过提升芯轴(原动件)控制整个机构的运动,运动状态可靠;对中锁紧机构锁定时,两连杆呈180°,利用机械死点锁紧,其他干扰外力均可抵消,锁定状态稳定,可保证水下控制模块在工作中运行稳定。
(3) 根据提升芯轴和提升芯轴把手连接形式、相关尺寸及材料选择,分析计算出提升芯轴提升(下压)能力,可供实际应用参考。
[1] 苏斌, 冯连勇, 王思聪, 等.世界海洋石油工业现状和发展趋势[J]. 中国石油企业, 2006(Z1): 138-141.
[2] 曹惠芬. 世界深海油气钻采装备发展趋势[J].船舶物资与市场, 2005(01): 17-20.
[3] 尹丰. 水下生产控制系统在气田设计中的应用[J].自动化应用, 2012(03): 18-20.
[4] 范亚民. 水下生产控制系统的发展[J].石油机械, 2012, 40(07): 45-49.
[5] 金向东, 林华春. 海上油气田水下生产系统的关键设备与技术[J]. 油气田地面工程, 2012,31(04): 55-56.
[6] 朱高磊, 赵宏林, 段梦兰, 等. 水下采油树控制模块设计要素分析[J]. 石油矿场机械, 2013,42(10): 1-6.
[7] 张丰功, 王定亚, 李磊, 等.水下控制模块的技术分析与发展建议[J].石油机械, 2013,41(06): 59-62.
[8] 《海洋石油工程设计指南》编委会. 海洋石油工程深水油气田开发技术[M].北京: 石油工业出版社, 2011.
DesignofCenter-AligningandLockingMechanisminSubseaControlModule
LIANG Bin, ZHANG Pengju, RAO Bin
(MSP/DRILEX (Shanghai) Co., Ltd., Shanghai 200943,China)
The function ,structure and installation of the Subsea Control Module(SCM)are analyzed. A new set of center-aligning and locking mechanism with a dead point and slider linkage as executive mechanism is designed, which enables the connection of all couplings in SCM. It provioles experience for the localization development and application of the SCM of the subsea X-mas tree and its related products.
Subsea Control Module(SCM); center-aligning; locking; unlocking; mechanism design
1001-4500(2017)06-0038-06
2017-06-20
工业和信息化部科研项目(2014[509]号文)“水下控制系统对接盘、锁紧机构研制”
梁 斌(1975-),男,高级工程师
TE953
A