基于传递矩阵法的渔船推进轴系回旋振动计算及程序开发
2017-12-29何思源
张 娟, 严 谨, 何思源
(广东海洋大学 海洋工程学院, 广东 湛江 524088)
基于传递矩阵法的渔船推进轴系回旋振动计算及程序开发
张 娟, 严 谨, 何思源
(广东海洋大学 海洋工程学院, 广东 湛江 524088)
为编制渔船推进轴系回旋振动优化计算程序,首先研究渔船推进轴系回旋固有振动的程序编制。针对船舶推进轴系的集总参数-分布参数混合模型,利用传递矩阵法建立船舶推进轴系回旋振动的计算模型及计算矩阵方程,用MATLAB编制矩阵方程求解的计算程序,将此程序应用于36.3 m拖网渔船轴系回旋振动计算,计算时考虑螺旋桨附连水效应,计算一次正逆回旋振动、叶片次回旋振动及倍叶片次回旋振动固有频率,计算结果与COMPASS计算结果进行对比,验证了MATLAB程序的正确性。应用此计算程序对回旋振动中主要参数的选择进行深入讨论和分析,确定关键参数的正确选择准则。研究结果可作为推进轴系振动计算程序开发研究的基础,为日后更复杂的程序开发奠定基础。
渔船;推进轴系;回旋振动;MATLAB
0 引 言
渔船轴系因回旋振动容易发生坐膛事故,回旋振动也会对船舶的正常生产产生影响,因此,非常有必要对渔船回旋振动进行分析。
传递矩阵法是计算轴系回旋振动的传统算法。刘刚等[1]采用集中质量-分布参数混合简化模型,利用传递矩阵法计算支承刚度各向同性时某船轴系回旋振动固有频率。张建军等[2]利用传递矩阵法分析气垫船垫升轴系回旋振动。周瑞等[3]利用改进Ri-ccati 传递矩阵法,采用分布质量模型计算轴系回旋振动临界转速和固有频率。关于渔船的推进轴系回旋振动的模型简化及振动影响因素,目前研究较少,本文采用传递矩阵法建立某拖网渔船推进轴系回旋振动的计算模型,利用MATLAB编制计算程序,对计算结果进行深入讨论及比较。
1 传递矩阵法计算轴系回旋振动的计算原理
本文基于传递矩阵法中的MP法进行编程运算。下面是MP法主要计算原理[4]。
(1) 利用各个截面的状态矢量Zi=[yθMQ]T之间存在的如下关系进行状态矢量传递。

(2) 通过传递矩阵从轴系始端传递至轴系末端。若轴系中有n个元件,则
(3) 通过轴系末端的边界条件列出剩余量方程,从而求解出轴系的各阶固有频率及固有振型。
MP法主要优点是表达式简单易懂,应用于计算机编程方便简洁,同时对计算机内存要求不高、计算时间相对较短。
2 渔船推进轴系传递矩阵计算模型的建立
若转子为轴对称的,则轴系回旋振动模型的简化一般有3种情况:(1)转子直径远大于转子自身长度,轴系刚度远大于支承刚度。此类模型简化一般认为转子是刚性,支承为柔性,支承刚度可认为是线性。(2)轴系长度远大于轴系直径。在这种情况下,支承的刚度大于轴系刚度,因此此类模型中转子通常被模拟为柔性,而支承则是刚性。(3)转子刚度与支承刚度相当。在这种情况下必须将转子、轴系、支承均看作是柔性的[5]。拖网渔船的推进轴系多数属于第(1)种类型。
2.1 推进轴系传递矩阵法计算模型
船舶推进轴系传递矩阵法的计算模型是从螺旋桨起到主机的飞轮或传动齿轮箱的大齿轮,又或是弹性联轴器为止。本文采用集总参数-分布参数混合模型,即螺旋桨作为集总质量,轴段具有分布质量,将螺旋桨简化为均质薄圆盘,轴按自然分段为等截面的均质轴段元件,如图1所示。
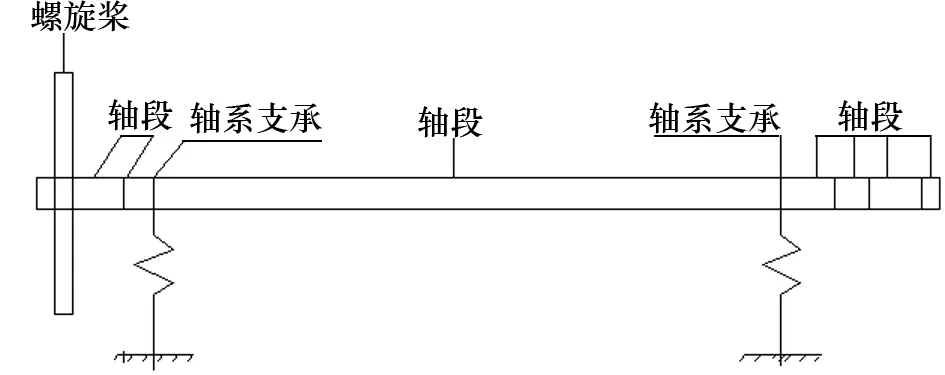
图1 船舶推进轴系元件组成
2.2 推进轴系传递矩阵法计算方程建立
2.2.1 各元件传递矩阵
(1) 轴段传递矩阵为

(2) 螺旋桨传递矩阵为
式中:jp为螺旋桨极惯性矩;jd为螺旋桨径向惯性矩;mp为螺旋桨质量。螺旋桨传递矩阵计算考虑螺旋桨的回旋效应及附连水效应。
(3) 支承传递矩阵为
式中:Ke为轴承等效线性弹簧刚度值。
2.2.2 总传递矩阵
根据图1中轴系组成,总传递矩阵为
2.2.3 剩余量方程
根据轴系两端的边界条件,可以对总传递矩阵进行简化。轴系两端分别为螺旋桨和弹性联轴器。螺旋桨为自由端,弹性联轴器则可简化为自由端[6],其他边界条件的简化见文献[6]。M1=0(Z13=0),Q1=0,M10(Zn3=0),Q10=0(Zn4=0)。由此可得剩余量为
3 MATLAB程序编制
3.1 程序编制思想
本次程序设计主要采用MATLAB中的for语句进行循环计算剩余量Res,利用if判断语句进行固有频率的搜索,并判断出固有频率为何值。
元件传递矩阵分3类:圆盘传递矩阵、轴段传递矩阵以及轴承传递矩阵。各类传递矩阵用MATLAB中function功能进行编写。
主程序中,一些主要参数通过行矩阵储存便于循环调用,元件编号同样通过行矩阵进行存储。调用上述function函数时,只需将该函数对应的M文件存储在MATLAB中的储存路径即可调用。传递矩阵编号通过调用相应元件矩阵编号,各元件传递矩阵也通过for语句循环计算,所用元件传递矩阵最终通过一扩展矩阵进行储存。
总传递矩阵计算同样通过for语句实现。各试算频率的剩余量通过一行矩阵存储,以供后续判断固有频率使用。搜索固有频率用for语句内嵌if判断语句进行,通过判断相邻剩余量之积小于零即可。
3.2 MATLAB程序应用验证
将此程序应用于某拖网渔船轴系回旋振动固有频率计算,并与COMPASS进行对比。COMPASS为中国船级社计算软件,其中轴系回旋振动计算模块为标准的船舶回旋振动校验程序。
3.2.1 计算条件
某拖网渔船轴系相关参数如表1所示。
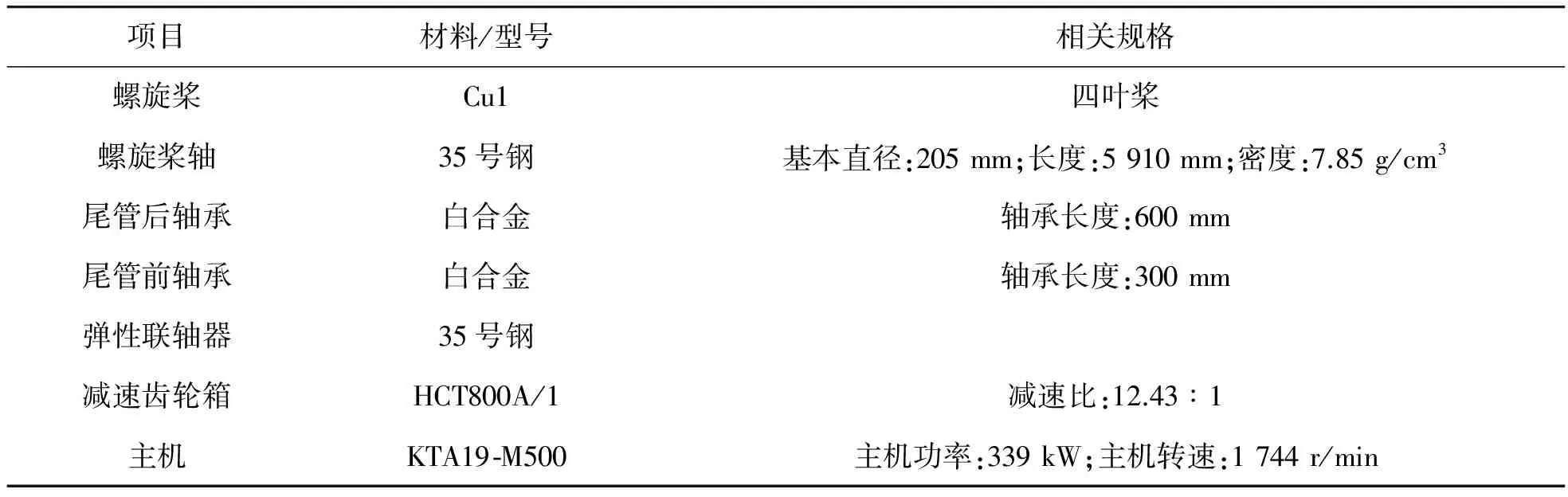
表1 拖网渔船轴系基本资料
3.2.2 计算结果比较
将自编的MATLAB 程序固有频率、临界转速计算结果与COMPASS固有频率、临界转速计算结果进行比较,如表2和表3所示。
从表2和表3的计算结果可以看出,MATLAB计算值与COMPASS的计算值相差仅在1.5%左右。

表2 固有频率计算结果比较 rad/s
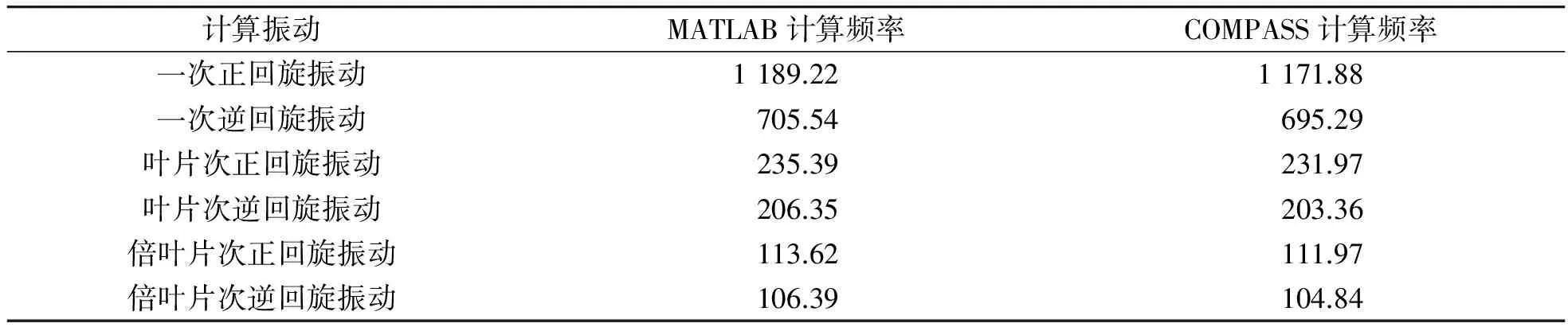
表3 临界转速计算结果比较 rad/s
4 参数选取对结果的影响
在参数选择时,有很多不确定性的因素,本文在此进行深入讨论,分析各参数选择对计算结果的影响。各参数包括:尾管后轴承刚度、尾管后轴承支点位置、螺旋桨左侧轴段计入与否、螺旋桨转速。使用控制变量法对某一参数的变化进行研究与分析。如通过控制其他参数的不变,而改变尾管后轴承刚度,分析它对回旋振动固有频率的影响[7]。
4.1 改变尾管后轴承刚度
尾管后轴承的刚度取为1×109N/m,按文献[6]推荐的范围,选取2×109N/m,3×109N/m 2个刚度与之进行对比,如表4所示。
由表4可以看出,当尾管后轴承的刚度上升时,回旋振动的固有频率有所上升,但是上升幅度不大。因此在计算回旋振动固有频率时,选择尾管后轴承刚度在(1~3)×109N/m范围内,固有频率变化幅度不大。选择该范围内一个刚度即可计算回旋振动的固有频率,其结果是合理的。
4.2 改变尾管后轴承支点位置
选取尾管后轴承支点分别位于1/7Lb,1/6Lb,1/5Lb,1/4Lb,1/3Lb等5种情况进行研究和分析,Lb为尾管后轴承支点位置距轴承衬套左端点的距离,计算结果如表5所示。

表4 尾管后轴承刚度变化时的固有频率 rad/s

表5 尾管后轴承支点位置变化时的固有频率 rad/s
由表5可知:轴系的回旋振动固有频率随着尾管后轴承支点位置距轴承衬套左端点距离的增大而减少;其中1/3Lb时,固有频率减少幅度较大,而其他值时其变化幅度并不大。原因可能是螺旋桨到后轴承等效支点位置的距离增大幅度较大,会使悬臂端长度较长,进而使固有频率降低。因此在轴系设计初期,计算固有频率应尽量避免选取值范围内两端的值,减小误差。
4.3 螺旋桨左侧轴段计入与否
在对轴系进行简化时,螺旋桨并不是简化在轴系的末端,而是在其等效位置中,这样就会出现螺旋桨左端轴段的处理问题。分不计入、计入时左乘传递矩阵、计入时右乘传递矩阵等3种情况进行讨论和研究。计算结果如表6所示。

表6 螺旋桨左侧轴段计入与不计入时的固有频率 rad/s
由表6可知,左侧轴段不计入时与左侧轴段计入时所得结果截然不同。其中,螺旋桨传递矩阵左乘左侧轴段传递矩阵时,固有频率与不计入时相差较大,而右乘时则与不计入时相差无几。
造成上述情况的原因是:(1)增加螺旋桨到轴系右端的长度,增加悬臂端长度,使得固有频率降低幅度较大。(2)没有改变螺旋桨到轴系右端的长度,等同于增加螺旋桨的质量效果,也使固有频率略微下降。在计算推进轴系回旋振动时,对于螺旋桨等效位置,应当结合实际测量结果进行,以免造成较大的误差。
4.4 螺旋桨不同转速下的固有频率
在轴系自转速度不同的情况下,对回旋振动固有频率进行计算与分析。选取螺旋桨额定转速及其1/4,1/2,3/4和1.1倍,即140 r/min,35 r/min,70 r/min,105 r/min和154 r/min这5个较为常用的转速进行计算和分析,计算结果如表7所示。
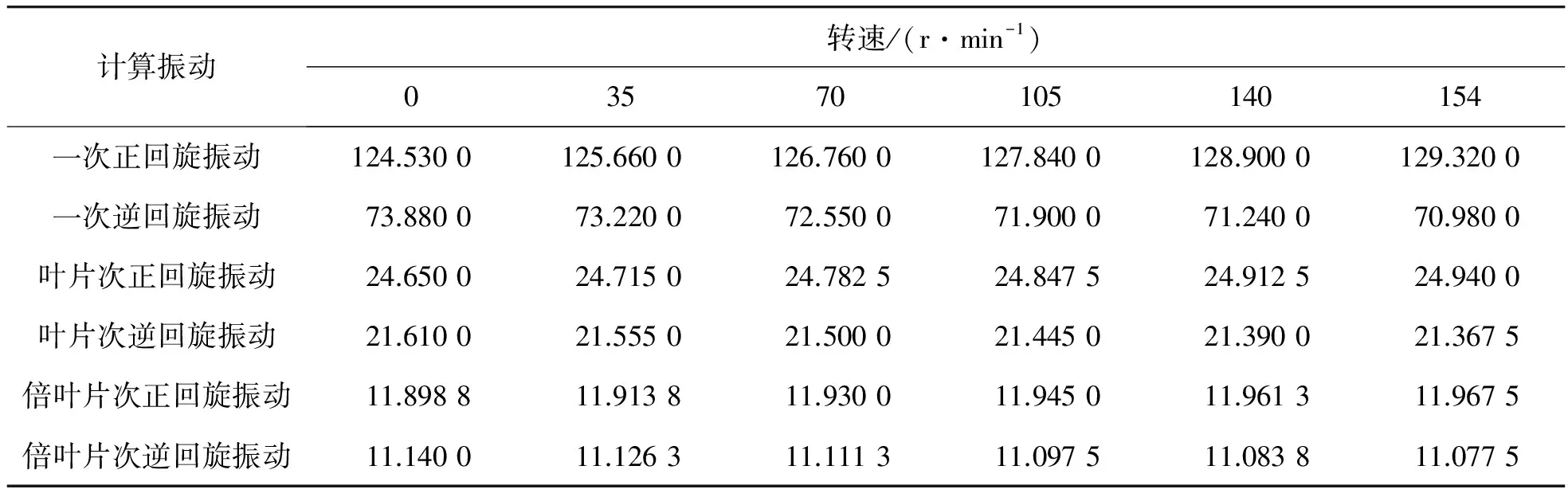
表7 不同转速下的固有频率 rad/s
由表7可知,正回旋振动固有频率随着转速的增大而增大,而逆回旋振动固有频率随着转速的增大而减少。
轴系实际情况更多为正回旋振动,逆回旋振动情况较少。表7中正回旋振动固有频率增大,对于螺旋桨转速为零时,即螺旋桨停下来时,其回旋振动固有频率最小,这种情况相较于其他情况,更易发生共振,此种情况最为危险。因此在实际计算中,可以只计算该情况。
5 结 论
通过上述计算分析,对影响船舶回旋振动的关键性参数选取进行讨论,确定该如何正确地选取计算参数。
(1) 轴系参数对于回旋振动都有不同程度的影响,其中轴承等效支点位置与轴系左侧轴段计入螺旋桨时影响最大,其他参数的变化都在较小的范围内波动。
(2) 尾管轴承的刚度选择可以参考文献[6]的范围,在其中选择一个值即可,尾管后轴承在刚度范围内对固有频率的影响不大。
(3) 尾管后轴承支点位置的选择尽量避免取端值,因端值的固有频率较其他值固有频率相差幅度相对较大。当采用固定系数计算固有频率时,尽量避开在范围内端部取值。
本文编制的MATLAB程序为后续的程序开发奠定了基础,后续将继续开发基于其他算法的船舶回旋振动计算程序。
[1] 刘刚,吴炜,饶春晓,等.基于传递矩阵法的船舶轴系回旋振动计算研究[J].中国舰船研究,2010,5(1):60-63.
[2] 张建军,许运秀.162客位气垫船垫升轴系回旋振动特性分析[J].噪声与振动控制,1994(2):7-12.
[3] 周瑞,李宁,鲍利群,等.基于分布质量轴模型的回旋振动计算方法[J].船舶力学,2013,17(8):931-936.
[4] 陈之炎. 船舶推进轴系振动[M]. 上海: 上海交通大学出版社,1987.
[5] MICHAEL I F, JOHN E T P, SEAMUS D G,et al.Dynamics of Rotating Machine[M].NewYork,Cambridge University Press, 2010:76.
[6] 中国船级社.船上振动控制指南[S].2000.
[7] 徐金明,张孟喜,丁涛.MATLAB实用教程[M].北京:清华大学出版社,2005.
WhirlingVibrationofPropulsionShaftSysteminTrawlerBasedonTransferMatrixMethod
ZHANG Juan, YAN Jin, HE Siyuan
(School of Ocean Engineering, Guangdong Ocean University, Zhanjiang 524088, Guangdong, China)
The hybrid model of lumped parameter and distribution parameter for propulsion shaft system in fishing boats is adopted to calculate free gyroscopic vibration of shaft system. Computing model and matrix equation of the propulsion shafting gyroscopic vibration are constructed based on Transfer Matrix Method, and MATLAB is used to compile computing program to solve the matrix equation. This program is applied to the 36.3 m trawler shafting gyroscopic vibration calculation, in consideration of propeller’s attached water effect. The first forward and backward free vibration frequency are computed and compared to calculation results with COMPASS, verifying the correctness of the MATLAB program. The shafting vibration calculation program developed in this study laid the foundation for the more complex program development.
fishing boat; propulsion shaft system; whirling vibration; MATLAB
广东省“创新强校工程”青年人才项目(编号:2015KQNCX053, GDOU2015050240); 广东省“创新强校工程”项目(编号:GDOU2016050258)
张 娟(1984-),女,讲师,研究方向为工程结构物静动态分析
1000-3878(2017)06-0027-06
U664
A