一种复合式机器人的轮足结构设计及仿真
2017-12-28朱艺萌许刘林张子昕
朱艺萌,唐 龙,许刘林,彭 康,张子昕
(1.南京师范大学附属中学,江苏 南京 210007;2.中国人民解放军理工大学野战工程学院,江苏 南京210007;3.江苏科技大学 电子信息学院,江苏 镇江212000)
一种复合式机器人的轮足结构设计及仿真
朱艺萌1,唐 龙1,许刘林2,彭 康2,张子昕3
(1.南京师范大学附属中学,江苏 南京 210007;2.中国人民解放军理工大学野战工程学院,江苏 南京210007;3.江苏科技大学 电子信息学院,江苏 镇江212000)
对一种六轮足复合式机器人进行受力分析,得到了机器人电机输出转速和转矩的表达式。基于飞机起落架结构设计了一种轮足结构,并对轮足结构在前摆、中间位置和后摆位置进行了分析,研究了各杆结构的尺寸比例关系。利用ADAMS软件对轮足结构进行了仿真,结果表明,三角支架在120°转角范围,推杆设计行程为150 mm时,三角支架主动驱动和电动推杆主动驱动均满足要求。
轮足结构;机器人;结构设计;运动仿真
轮足复合式机器人不仅具有轮式机器人快速机动的特点,又兼备了腿足式机器人优越的越障性能,能够适应更加复杂的需求环境[1-3]。在平整地面上,六轮足机器人的转向可以通过差速来实现。但在复杂环境下,机器人在适应环境时需要通过轮足摆腿结构摆动一定的角度进行姿态调整。因此,研究机器人的轮足结构,对于充分发挥其快速越障的性能具有重要意义[4,5]。
1 受力分析
轮足复合式机器人的轮足结构采取自下而上的设计思路,根据路面条件和速度要求,确定车轮直径和驱动电机;采用四连杆机构,设计轮足式摆腿结构;通过受力分析,计算得到电动推杆的相关参数,选取符合要求的电动推杆;最后将各零部件组装得到完整的轮足摆腿结构模块。
设车轮直径为D,最大行驶速度为v0,速度传输比为i,整车总重量为G.对于六轮足复合式机器人,电机输出转速nm与机器人行驶速度v的关系、电机输出转矩Tm与行驶驱动力Ft的关系如式1所示,其中η为传动效率。

机器人运动时还需要考虑其最大爬坡角度,图1是机器人在爬坡过程中的受力示意图,此时所受阻力主要包括滚动阻力Ff、上坡阻力Fi、空气阻力Fw、加速阻力Fj等。
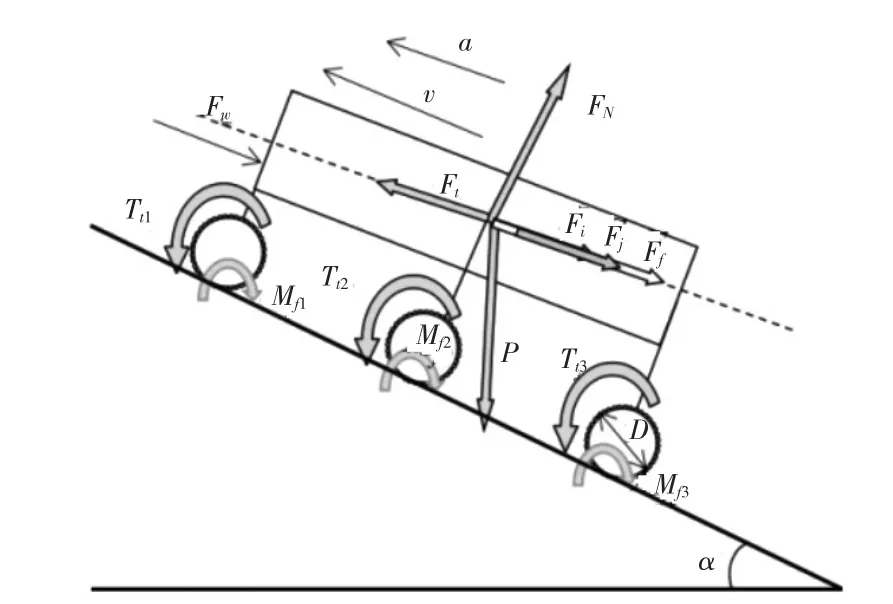
图1 机器人爬坡过程受力示意图

其中,f是滚动摩擦系数,α是坡度角度,CD是空气阻力系数,A是机器人平台的迎风面积,δ是加速阻力系数。
所选驱动电机的输出转速nm、输出转矩Tm应该满足式(3)所示的关系,其中αmax是机器人平台所能够爬越的最大斜坡角。
可以根据实际需求计算得出电机输出转速和输出转矩的值。例如,最大平地行驶速度为50 km/h,整车重量为40 kg,最大爬坡角度40°,驱动车轮直径为80 mm,车轮与地面间的摩擦系数0.3,电机输出与车轮间的速度传输比为2,传动效率为0.8时,所受到的空气阻力忽略不计,加速阻力主要由和机器人的加速度dv/dt决定,通过控制机器人平台的加速度,将加速阻力控制在可以忽略的范围内,设定安全系数μ为2,可以求得电机输出转速和输出转矩的要求为转速大于3 684 r/min,转矩大于3 N·m.
2 轮足结构设计分析
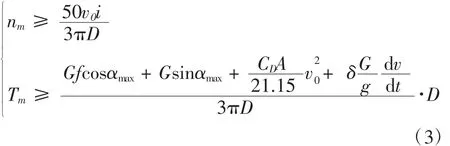
图2是轮足结构示意图,轮足复合式机器人轮足的设计是基于飞机起落架进行改进的结构[6]。电动推杆是动力元件,通过推杆自由端的伸缩运动实现车轮在一定范围内摆动;轮足三角支架是连接件,将电动推杆的直线运动转变成车轮的摆动运动,并实现车轮对平台的稳固支撑;两个从动杆是从动件,与电动推杆、轮足支架组成四连杆机构,使轮足结构稳定可控。
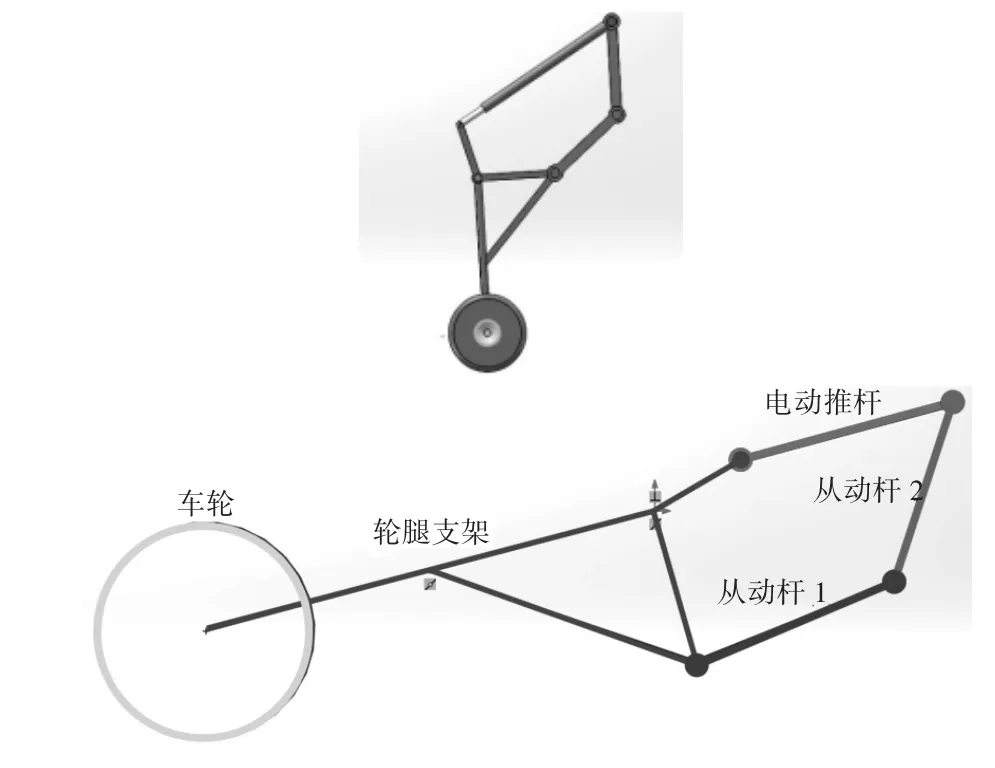
图2 轮足结构示意图
轮足结构设计的关键是实现车轮在平台行驶方向上的前后摆动。图3是运动过程中轮足结构的三种位置。电动推杆的长度用l表示,轮足支架的四个杆件分别用 l1、l2、l3、l4表示,l3与 l1反向延长线的夹角用β表示,l5、l6表示两个从动杆件。安装时使电动推杆l与轮足支架l1的夹角为β,轮足支架l1与水平面的夹角为2β,则轮足前摆最大角度为90°-β,如图3(a)所示。后摆到最大位置时,轮足支架l3与水平面的夹角为β,即轮足后摆最大角度也为90°-β,如图3(c)所示。基于上述分析,通过设计各个杆件的尺寸及其安装位置,可以实现轮足前后90°-β的摆动,从而使轮足复合式机器人能够越过台阶、斜坡、跨沟等障碍物。
各个杆件的尺寸与车轮大小需要呈一定比例关系。杆件尺寸相对车轮偏小时,平台底盘质心与地面间距离的调节范围小,难以发挥轮足结构底盘高度可调的优势;杆件尺寸相对车轮偏大时,车轮支撑不稳定,机器人在运动过程中易发生倾摆、抖动等现象。车轮直径为 D,轮足支架各杆件长度 l1、l2、l3、l4分别取值为 0.75D、D、2D、1.5D,从动件 l5、l6的长度分别取1.2D、1.3D,电动推杆的原始长度lmin取2D.本研究中β取值为15°,即前后摆动的最大角度可达到75°。由图3(c)中的几何关系可得到电动推杆行程要大于2l1cosβ,即要大于1.45D,取值为1.5D.
3 运动学仿真
利用分析软件ADAMS对轮足摆腿结构进行仿真,首先是摆腿摆动120°角度范围内,对于推杆行程的变化,据此可以验证推杆最大行程的选取是否正确;然后是推杆在特定行程范围内移动时,对于摆腿结构摆动角度的变化的验证。
图4为摆腿机构模型图,其中A和B两点固定在车体上,推杆的两个圆柱体为移动副,其余各处均为铰接转动副。
3.1 三角支架主动驱动仿真
图5为三角支架主动驱动时在A点施加力矩的仿真模型图。在A点添加转动驱动力矩,此时推杆为从动件,在三角支架转动的角度范围内可以得到推杆的行程要求。
图5 A点施加力矩时的仿真模型
以三角支架作为驱动主动件时,随着支架的转动,推杆跟随着实现伸缩平移运动。图6是三角支架作为主动件时的仿真曲线图,从图中可以看出,三角支架在120°转角范围内,推杆的行程要求为105 mm,因此此次所选取的推杆(其行程为150 mm)满足要求。
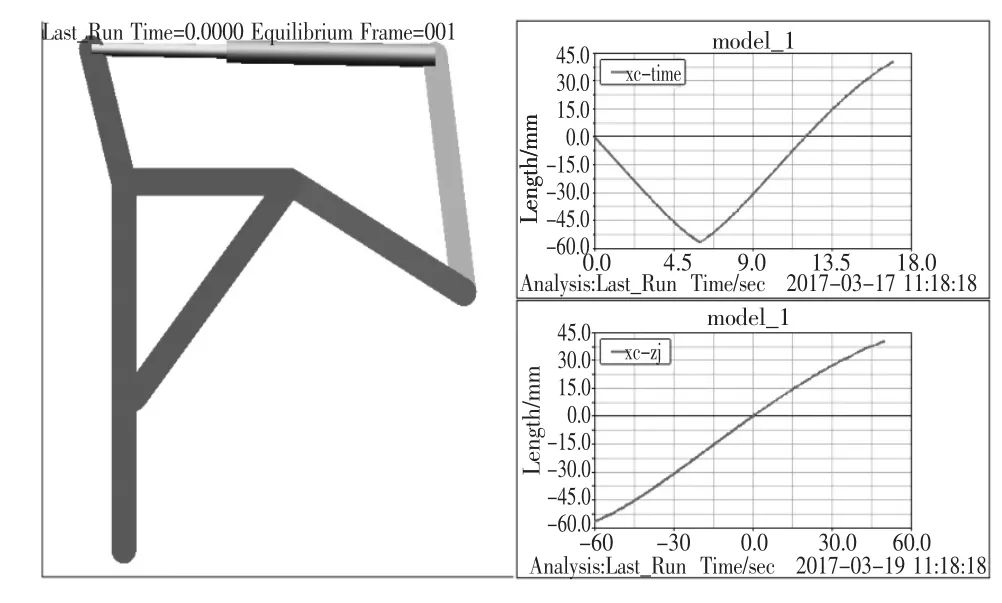
图6 三角支架作为主动件时仿真曲线图
3.2 电动推杆主动驱动仿真
图7 是推杆作为主动件时的仿真模型。其中电动推杆作为主动驱动,三角支架以及车轮为从动件,在推杆移动副上施加一个平移运动,此时验证推杆在105 mm 行程运动范围内可以得到的三角支架转动的角度范围。
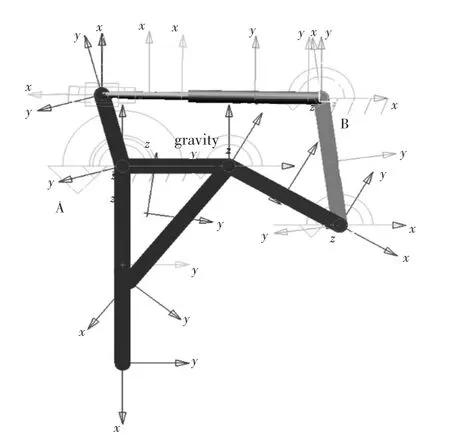
图7 推杆作为主动件时的仿真模型
以电动推杆作为驱动主动件时,随着电动推杆的伸缩运动,三角支架跟随着实现转动,由图8可以看出,推杆在105 mm行程范围内时,三角支架所能够摆动的角度为120°,满足要求。

图8 电动推杆作为主动件时仿真曲线图
4 结束语
(1)对轮足复合式机器人在平地和爬坡过程中的情况进行了受力分析,推导了电机转速和转矩在满足需求时的表达形式,求解了满足设计需求的相关参数。
(2)基于飞机起落架结构设计了轮足结构,并对轮足结构在运动过程中的三种位置情况进行了详细分析,得到了轮足结构的尺寸比例关系。
(3)利用ADAMS软件对轮足结构进行了仿真,得到了三角支架作为主动件时推杆的动作曲线及推杆作为主动件时三角支架的摆动角度,验证了结构满足设计要求。
[1]邓哲宇.轮式移动机器人建模与运动控制策略研究[D].杭州:浙江大学,2015.
[2]刘 静,赵晓光,谭 民.腿式机器人的研究综述[J].机器人,2006,28(1):81-88.
[3]赵旦谱.非结构地形轮足式移动机器人设计与步态规划研究[D].北京:清华大学,2010.
[4]谈自忠.机器人学与自动化的未来发展趋势[J].中国科学院院刊,2015(06):772-774.
[5]胡师柿,宋春华.机器人的现状及发展趋势[J].科技经济导刊,2016(10):34-36.
[6]董伟光,王洪光,姜 勇.一种轮足复合式爬壁机器人动力学建模与分析[J].机器人,2015(03):264-270.
Design and Simulation of Wheel Foot Structure of a Composite Robot
ZHU Yi-meng1,TANG Long1,XU Liu-lin2,PENG Kang2,ZHANG Zi-xin3
(1.High School Affiliated to Nanjing Normal University,Nanjing Jiangsu 210007,China;2.College of Field Engineering,PLA University of Science and Technology,Nanjing Jiangsu 210007,China;3.School of Electronic Information,Jiangsu University of Science and Technology,Zhenjiang Jiangsu 212000,China)
The force analysis of a six wheeled compound robot is carried out,and the expression of the rotational speed and torque of the robot motor is obtained.Based on the structure of the aircraft landing gear,a wheel foot structure is designed,and the position of the front foot,the middle position and the rear pendulum are analyzed.The relationship between the size of the rod structure is studied.The wheel foot structure is simulated by using ADAMS software.The results show that the triangle bracket is in the range of 120°,the push rod design schedule for 150 mm,drive and the triangle bracket can satisfy the requirements of driving electric putter.
wheel foot structure;robot;sructure design;motion simulation
TP242.6
A
1672-545X(2017)10-0041-04
2017-07-15
朱艺萌(2000-),女,江苏人,高中,研究方向:结构力学;唐 龙(1967-),男,江苏人,物理教师,学士(本科),研究方向:结构设计与仿真。
