谐波齿轮传动在工业机器人领域的应用分析
2017-12-28王凯
王 凯
(咸阳职业技术学院,陕西 咸阳 712000)
谐波齿轮传动在工业机器人领域的应用分析
王 凯
(咸阳职业技术学院,陕西 咸阳 712000)
谐波齿轮传动以其独有的结构特点,已成为现代工业重要的基础部件。超过60%的谐波齿轮传动应用在机器人工业系统中。就五自由度机械臂采用谐波齿轮传动结构进行分析。机器人操作机构有两种运动关节,分别是转动关节和移动关节,关节运动最常采用伺服电机经机械传动装置减速后驱动。设计采用谐波齿轮传动实现减速驱动,涉及其运动精度影响因素较多,重点分析误差源及产生机理等情况。
谐波齿轮传动;机器人;五自由度机械臂;运动精度
谐波齿轮传动是二十世纪中期由美国C·Musser发明的,随着空间技术发展,近代齿轮传动技术也取得了重大突破。谐波齿轮传动是一种不同于建立在刚体力学基础上的新型机械传动,依靠弹性变形使用柔性构件来实现传动,它突破了机械传动采用刚性构件的模式,从而获得了一系列其他传动难以达到的特殊功能,正广泛应用于现代工业的诸多方面。本文通过检索谐波齿轮传动应用领域的优势短板和发展趋势,观摩、借鉴国外先进技术和设计理念,探索谐波齿轮传动装置的设计原则、制造方法和加工技术,对谐波齿轮传动运动精度影响因素进行分析,以解决传统谐波齿轮传动设计、装配调试与生产线应用中暴露出的问题。
1 谐波齿轮概述
1.1 谐波齿轮传动结构型式
谐波齿轮传动主要由三个基本的构件组成,分别是波发生器、柔轮以及刚轮。可使三个构件中任意一个为固定件,其余两个构件中一个作为主动件,另一个作为从动件,这样就实现固定传动比状态下的减速或增速传动,也可以变成两个输入端,一个输出端,这样就形成了差动传动。
1.2 谐波齿轮传动工作原理
谐波齿轮传动工作原理如图1所示。在柔性齿轮构件中,通过波发生器的作用,产生一个移动变形波,并与刚轮齿相啮合,从而达到传动目的。波发生器为主动元件时,凸轮在柔轮内转动,就近使柔轮及薄壁轴承发生可控的弹性变形,这时柔轮的齿就在变形过程中进入(啮合)或退出(啮离)刚轮的齿间,在波发生器的长轴处处于完全啮合,而短轴方向的齿就出在完全脱开的状态。当电机带动波发生器在柔轮内连续转动时,其迫使柔轮产生连续的弹性变形,就使柔轮齿的啮入——啮合——啮出——脱开四种状态下循环往复不断地改变各自原来的啮合状态(错齿运动),作为减速器就可将输入的高速转动变为输出的低速转动,从而实现了大的减速比。

图1 谐波齿轮传动工作原理图
1.3 谐波齿轮传动特点
谐波齿轮传动打破了古板的刚性构件死板的传动模式,灵活的借用了柔软的构件,完成了机械传动的功能。其特别之处,通常是指它的传动设备结构具有重量轻、体积小的优点,同时具备承载力大、传动比高、效率高等优点,同轴性好,回差小,也可以向密闭的空间进行动力的传递。
谐波齿轮传动是机器人实现运动功能的核心部件,是轻型工业机器人和机械臂可靠,精确运行不可或缺的零部件。目前超过60%的谐波齿轮传动应用在机器人工业系统当中[1]。我国于2014年5月已发布《机器人用谐波齿轮减速器》标准(GB/T30819--2014)。日本本田公司仿生机器人ASIMO的手臂与腿部至少使用了24套谐波齿轮传动装置;美国NASN发射的火星机器人每个则使用了19套谐波齿轮传动装置。谐波齿轮传动已成为现代工业重要的基础部件。
2 工业机器人介绍
机器人(robot)是能够根据指令自动执行工作的机器装置,它既可以受人类实时指挥,又可以运行预先编辑的程序,还可以根据人工智能技术制定的原则纲领来完成相关工作[2]。它的任务是协助或取代人类重复性或危险性较高的工作。工业机器是机器人的一种,是面向工业领域的多关节机械手(臂)或多自由度的机器装置。
2.1 工业机器人的基本组成
工业机器人由3大部分及6个子系统组成,如图2所示。3大部分一是机械部分,二是传感部分,三是控制部分。6个子系统包括机械结构系统、驱动系统、感受系统、控制系统、人机交互系统和环境交互系统。本文主要对其中的的驱动系统和机械结构系统进行说明。

图2 工业机器人系统组成
2.1.1 驱动系统
驱动系统是一种由多项结构组成的综合装置,其包括动力装置、调节装置、辅助装置。要使得机器人设备正常工作,顺利进行运作,就需要为机器人的不同部位装设传感装置以及动力体系,这一综合体系就是驱动系统[3]。
为机器人提供原动力常用的驱动系统有液压传动、气压传动和机械传动。根据需要也可由这三种基本类型组合完成复合式的驱动系统,还可以是直接驱动或者通过同步带、轮系、谐波齿轮等机械传动机构进行间接驱动。
2.1.2 机械结构系统
工业机器人的机械机构主要由四大部分构成:机身、臂部、腕部和手部。每一部分都有若干自由度,构成一个多自由度的机械系统,有的还增设行走机构。手部即与物件接触的部分,常用的手部运动形式有回转型和平移型。手腕是连接手部和手臂的部件,可用来调整被抓取物件的方位。手臂是支撑被抓物件、手部、手腕的重要部分,其作用是带动手部去抓取物件,并按预定要求将其搬运到指定位置。
2.2 五自由度机械臂结构介绍
传统机械臂占地空间大,在某些特定的工作场所需要一种占用空间小,动作灵活的多自由度机械臂。通过对机械臂结构分析,重点要考虑机械臂的动力源和动力传动方式。实验可知采用谐波齿轮驱动机械臂具有结构紧凑、传动精度高、体积小、承载力大、重量轻等优点。如图3所示,机械臂的运动轴包括——手臂升降轴(Arm Elevator)、手臂伸展轴(Shaulder)、夹爪倾斜轴(Tilt)、手爪旋转(Wrist)和抓取轴(Gripper),一共为5轴,即五自由度机械臂。
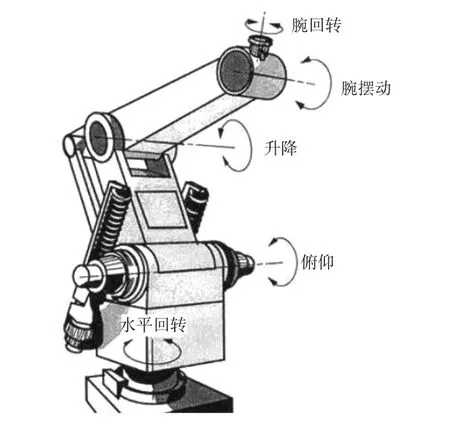
图3 五自由度机械臂
五自由度机械臂采用一个三轴悬挂机构,外加一个腕节机构,在三维空间中实现五自由度运动。原理是:腰部的回转是通过直流调速电机再经过一级齿轮传动来实现;大臂、中臂和小臂的俯仰通过谐波齿轮传动来实现;腕部的回转则通过一级谐波再经过二级齿轮来实现。鉴于机械臂从第一关节到末端抓手的重量较大,因此第一关节处电机需要提供巨大的扭矩来启动和制动整个机械臂,而此处电机的体积也受到一定限制,另外该处运动精度要求更高,设计为谐波齿轮传动装置。
3 谐波齿轮传动运动精度影响因素分析
3.1 传动误差
传动误差是衡量谐波齿轮传动的运动精度重要指标之一。依其薄壳弹性变形理论,对机构产生的回差、刚度误差和传动误差进行分析,谐波装置的三个部件的加工误差以及装配误差,即刚轮、柔轮及波发生器部件在加工和装配时产生的误差,都是主要的运动误差源[4]。谐波齿轮传动由于具有同时参与啮合的齿对数较多的特点,因此对运动误差有补偿作用,这就使得谐波齿轮传动机构和普通齿轮传动机构相比,前者的运动误差较小。通过刚轮周节误差的大小所引起的系统传动精度的变化情况分析,系统的传动精度与影响因素(刚轮周节误差)的大小之间呈线性关系。
3.2 误差测试
谐波齿轮传动误差可以通过理论计算确定,但由于影响因素较多,理论计算结果只能是近似值,而且误差的测试大多属于静态测试,仅能显示低频成分,反映不了传动误差的高频成分,因此需要设计谐波齿轮传动误差动态测试系统来完成。谐波齿轮传动机构和普通齿轮传动机构相比,前者的运动误差曲线具有高频化的特点,这是因为谐波齿轮机构的三个构件在加工以及安装的过程中均出现了低频误差高频化的现象。
3.3 “拍频”现象
通过分析谐波齿轮传动的运动误差曲线,发现该曲线存在“拍频”现象。谐波齿轮传动误差中,存在两个频率相差较小的传动误差分量,这是由于刚轮和柔轮的偏心向量产生的运动误差频率相差较小,这就形成了误差曲线的“拍频”现象。
4 结束语
谐波齿轮传动一般都是小模数齿轮,传动装置都有小体积和超小体积传动装置的特征,应用在高精密运动控制的众多机电一体化产品,在工业技术和自然科技领域尽显优势,尤其在机器人行业应用最为广泛。谐波齿轮传动已成为现代工业重要的基础部件。机器人是先进制造技术和自动化装备的典型代表,它涉及机械、电子、自动化控制、计算机、人工智能、传感器、通信和网络等多个学科,是多种高新技术不断发展的综合体现,因此它的发展与众多学科发展紧密相连。
[1]李召华,杨 帆,韩 梅.谐波齿轮传动装置的传动精度分析[J].机电产品开发与创新,2010,23(2):9-11.
[2]王保军,滕少峰.工业机器人基础[M].武汉:华中科技大学出版社,2015.
[3]王 凯.塑料谐波齿轮传动可行性研究[C]//乌鲁木齐:新疆机械工程学会,2016.
[4]兰 虎.工业机器人技术及应用[M].北京:机械工业出版社,2014.
Application Analysis of Harmonic Gear Drive in Industrial Robot Field
WANG Kai
(XianYang Vocational&Technical College,Xianyang Shaanxi 712000,China)
Harmonic gear drive,with its unique structural characteristics,has become an important basic component of modern industry.More than 60%of harmonic gear drive is applied in robot industrial system.The harmonic gear drive structure of five degree of freedom mechanical arm is analyzed.The robot operating mechanism has two kinds of motion joints,which are rotating joint and moving joint,and the joint motion is most often driven by servo motor,which is driven by mechanical transmission.The design uses harmonic gear drive to realize the deceleration drive,which involves many factors affecting the motion accuracy,and analyzes the error source and the mechanism.
harmonic gear transmission;robot;5-DOF manipulator;motion precision
TP242.2
B
1672-545X(2017)10-0003-03
2017-07-23
王 凯(1962-),男,陕西咸阳人,副教授,本科,研究方向:机械工程。
